Navigating the Boundaries of Urban NOA: A Deep Dive into Intelligent Driving Functions
 04/17 2025
04/17 2025
 1207
1207
Produced by ChiNeng Technology
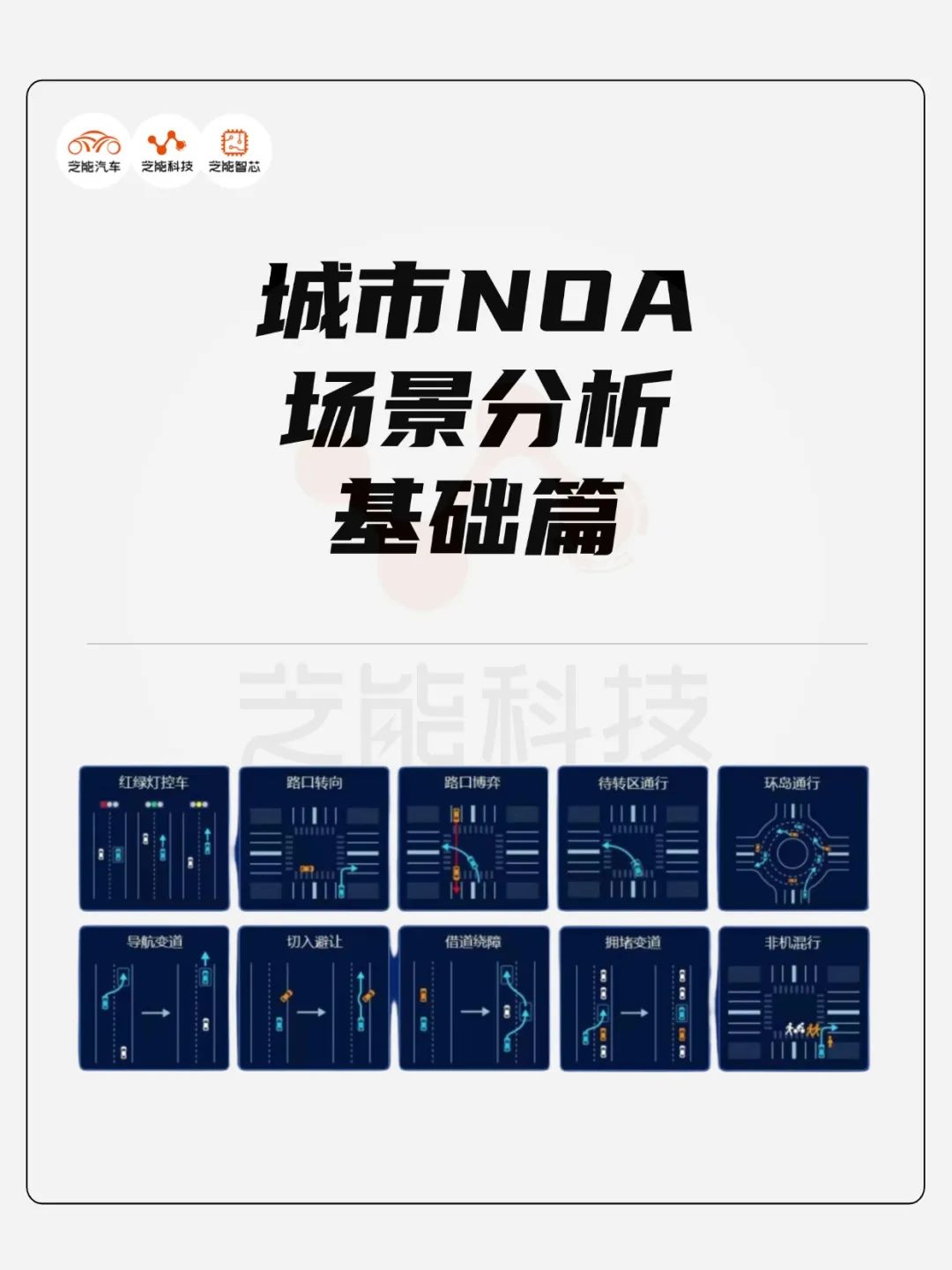
In 2025, the terms "urban NOA" and "highway NOA" have gained widespread recognition. It is crucial to understand the capabilities and limitations of the urban NOA (Navigation on Autopilot) system.
By integrating navigation with autonomous driving functions, urban NOA facilitates seamless assisted driving from start to finish, especially in complex urban environments. It must maintain speed and lane position while navigating diverse scenarios such as car following, lane changes, intersection crossings, avoiding sudden vehicle maneuvers and vulnerable road users, obstacle circumvention, and various U-turn operations.
Drawing from definitions of intelligent driving function test scenarios, verification requirements, and performance indicators, we systematically analyze the key functions of urban NOA and discuss methods for ensuring its safety and stability in real-world urban conditions. An in-depth analysis of test scenarios provides insight into evaluating current technological advancements.
01
Intelligent Driving Function Test Scenarios:
Diversity and Its Significance
The core objective of urban NOA is to enable point-to-point autonomous driving without manual intervention, requiring the vehicle to accurately follow navigation instructions and safely execute various driving tasks in complex urban settings.
To ensure system reliability and safety, functional test scenarios must comprehensively cover real-world driving conditions and be validated through clear test definitions and performance metrics.
In addition to basic speed maintenance and lane-keeping, the following critical functional scenarios are particularly important in urban NOA:
●Car Following
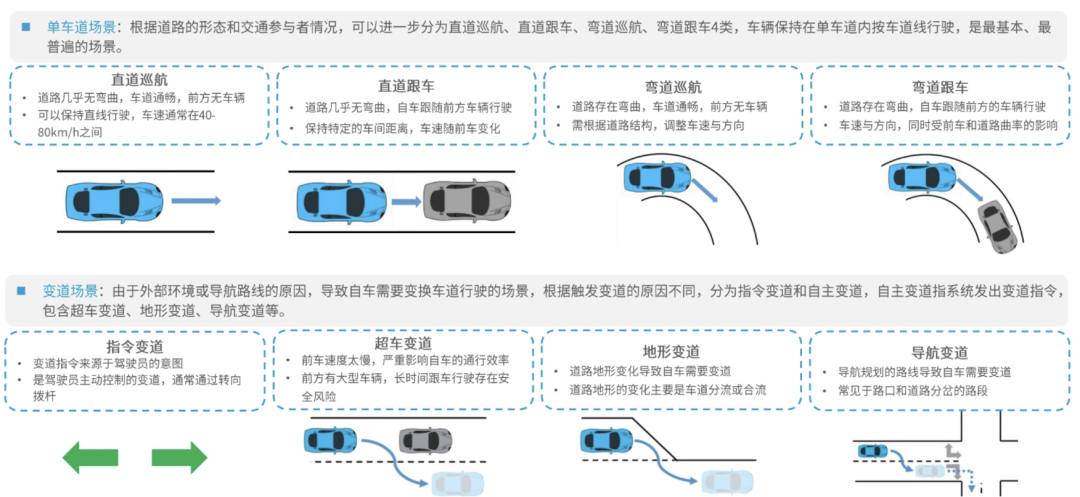
Car following is a common scenario in urban driving, encompassing three sub-scenarios: stable following, following a vehicle with varying speeds, and the target vehicle exiting:
◎Stable Following: The test vehicle must maintain a safe distance when following a target vehicle traveling at a constant speed of 5~100 km/h. For instance, the lateral offset between the ego vehicle and the target vehicle's rear axle should be ≤0.6 m, with a time headway of ≥0.8 s. This scenario validates system stability during normal following.
◎Following a Vehicle with Varying Speeds: When the target vehicle decelerates to a stop at 3 m/s² and accelerates to 60 km/h at 1.5 m/s² within 3 seconds, the ego vehicle must smoothly adjust speed and distance, maintaining a longitudinal distance ≥1 m after stopping and an average acceleration rate ≤5 m/s². This tests the system's responsiveness to dynamic targets.
◎Target Vehicle Exiting: When the target vehicle travels at 20~60 km/h and exits the lane at a lateral speed of 0.5~1 m/s, the ego vehicle must smoothly adjust within 10 seconds. This scenario evaluates the system's adaptability to sudden target vehicle departures.
●Lane Changing and Merging/Switching
Lane changing is crucial for urban NOA to navigate path switches, specifically including:
◎Lane Changing: Upon driver initiation, the ego vehicle must smoothly enter the target lane and resume lane keeping, tested once on the left and once on the right for smooth and safe operation.
◎Merging onto the Main Road: When merging from a ramp onto the main highway, the ego vehicle must safely complete the merge based on navigation instructions to avoid conflicts with other vehicles.
◎Entering the Ramp: When exiting the highway via a ramp, the ego vehicle must smoothly exit the main road and maintain navigation path continuity.
●Intersection and Roundabout Navigation
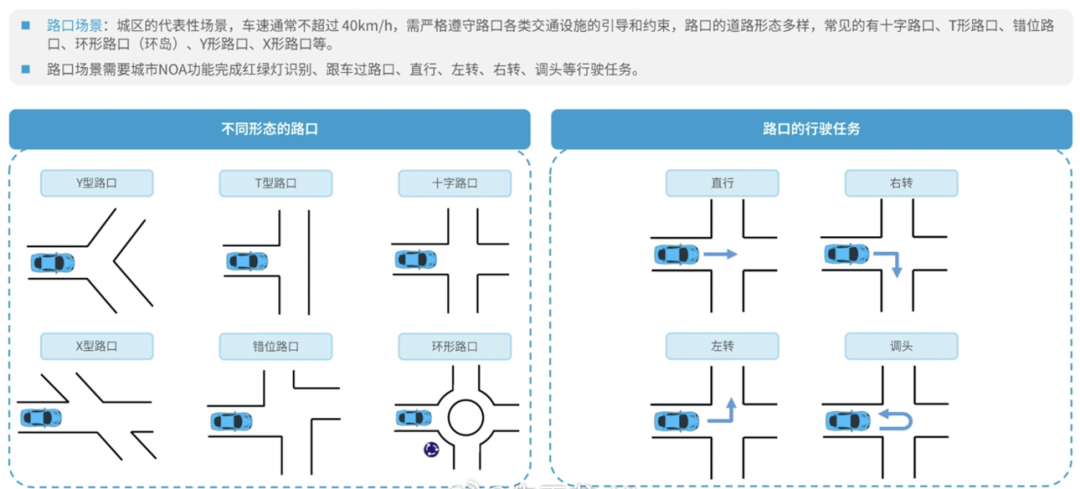
Urban intersections and roundabouts pose high complexity for NOA, with test contents including:
◎Straight Travel at Intersections: The ego vehicle must navigate complex intersections with at least two lanes at 40~60 km/h, requiring smooth crossing to avoid misalignments.
◎Right Turn at Intersections: Starting from a non-right-turn lane, the ego vehicle must complete a right turn at 30~60 km/h, validating steering ability under navigation.
◎Left Turn at Intersections: Turning left at 50 km/h, the ego vehicle must safely navigate conflicts with vehicles traveling straight at 50 km/h on the right.
◎Roundabout Navigation: Passing through the roundabout at 40 km/h and exiting at the designated exit, testing circular path navigation and driving ability.
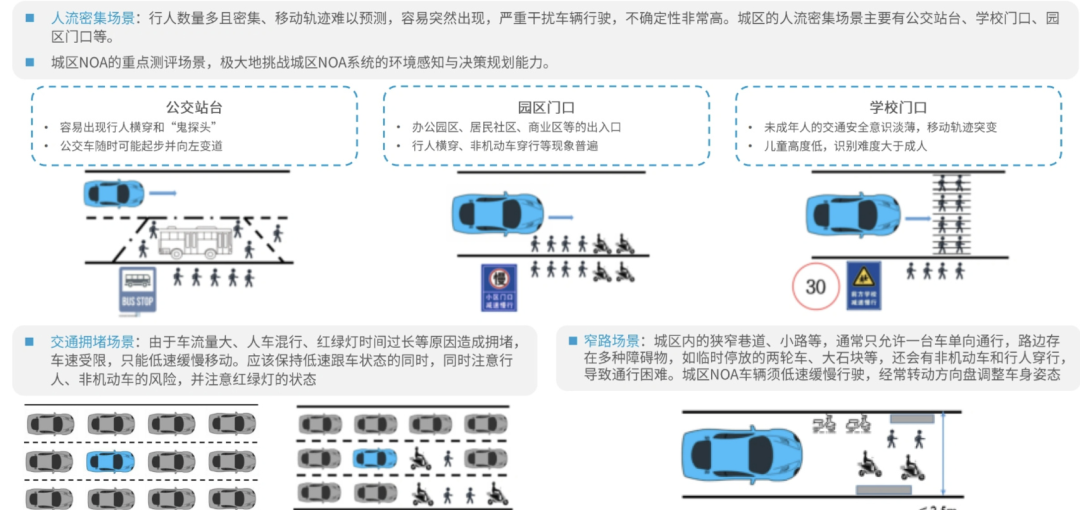
●Front Vehicle Maneuvers and Vulnerable Target Avoidance
In urban settings, frequent vehicle-pedestrian/bicycle interactions necessitate the following capabilities:
◎Front Vehicle Cutting In: When a neighboring lane vehicle cuts in front at 1.0~1.1 m/s, the ego vehicle must smoothly adjust speed and distance to maintain safety.
◎Front Vehicle Lane Change: When the target vehicle changes lanes and exits with a time-to-collision (TTC) of 2.8 s with a front low-speed vehicle, the ego vehicle must smoothly transition to a new following state.
◎Pedestrian/Bicycle Avoidance: Encountering pedestrians or bicycles in a solid lane, the ego vehicle must decelerate and follow, maintaining a safe distance and smoothness.
●Obstacle Avoidance and U-Turns
Road obstacles and U-turns present unique urban driving challenges:
◎Avoiding Cones/Water Barriers: When driving on a two-lane road at a set speed and encountering a right-side obstacle intrusion, the ego vehicle must change lanes to bypass, maintaining a lateral distance of 1.5 m from the inner edge and a longitudinal distance >100 m.
◎Intersection U-Turn: Under navigation, the ego vehicle must smoothly complete a U-turn at 50 km/h.
◎Dedicated Turn U-Turn: At a dedicated turn intersection, complete a U-turn at 50 km/h to ensure path execution accuracy.
●N-Turn
An intricate urban NOA function, N-turn involves making a U-turn at an intersection with two-way two-lane roads. After setting the navigation path, the ego vehicle cruises at 50 km/h and smoothly completes the U-turn, with smoothness as a performance metric. This scenario validates the system's narrow-space navigation and multi-directional interaction capabilities.
02
Urban NOA System:
Verification Requirements and Performance Indicator Analysis of Test Scenarios
To ensure urban NOA system functionality, test scenarios must be rigorously evaluated through verification requirements and quantifiable performance indicators.
From a technical perspective, we deeply analyze the design and significance of key scenarios:
●Dynamic Response of Following Function: Testing not only focuses on static distance maintenance but also validates system adaptability to dynamic changes.
For example, in the "following a vehicle with varying speeds" scenario, simulating common urban congestion and start-ups, the ego vehicle must stop within 3 seconds and smoothly accelerate with an acceleration rate ≤5 m/s. This indicator directly reflects system control accuracy and passenger comfort.
The 10-second adjustment window and ≥0.8 s time headway in the "target vehicle exiting" scenario ensure safety redundancy under sudden operational changes.
●Path Planning of Lane Changing and Merging/Switching: Lane changing relies on coordinated sensor perception, path planning, and execution control.
Taking "lane changing" as an example, upon driver initiation, the ego vehicle must smoothly change lanes left and right based on the surroundings, with "smooth completion" as the performance metric. This can be refined into quantifiable standards like lateral acceleration ≤0.3 g and lane-changing time ≤5 s in testing.
"Merging onto the main road" and "entering the ramp" further test the system's real-time navigation response, requiring safe lane entry/exit in complex traffic, reflecting urban NOA's advanced decision-making.
●Navigation Coordination of Intersection and Roundabout Navigation: These scenarios emphasize NOA's integration of navigation and autonomous driving.
For instance, "left turn at intersections" requires safe turning amidst oncoming conflicting vehicles, necessitating precise traffic signal recognition, path prediction, and avoidance strategies. "Safe completion" means zero collisions and rule-compliant operations.
Similarly, "roundabout navigation" tests path selection in multi-exit roundabouts. The set speed of 40 km/h and "stable driving" requirement further validate control stability in continuous curvature changes.
●Safety of Front Vehicle Maneuvers and Vulnerable Target Avoidance: Urban NOA faces higher demands due to vulnerable road users like pedestrians and bicycles.
In "pedestrian/bicycle avoidance," the ego vehicle must decelerate and follow within a solid lane, maintaining a longitudinal distance >100 m from the target. This avoids unnecessary lane changes and reflects adherence to rules and safety priority.
In "front vehicle cutting in," the brief 0.4~0.6 s time headway tests emergency response, ensuring stability even in dense traffic.
●Execution Accuracy of Obstacle Avoidance and U-Turns: "Avoiding cones/water barriers" simulates urban obstacles, requiring the ego vehicle to actively change lanes to bypass perceived lateral intrusions of 1.5 m.
This relies on high-precision perception and planning, with "smooth bypassing" quantified through lateral acceleration and speed fluctuations.
"N-turn" and "U-turn" test low-speed maneuverability in narrow spaces, with a 50 km/h cruising speed and "smooth completion" ensuring operational comfort and safety.
Summary
As an advanced intelligent driving technology, urban NOA's functionality relies on comprehensive verification across diverse test scenarios. Analyzing common functional scenarios and their test standards from six aspects—car following, lane changing, intersection navigation, front vehicle maneuvers and vulnerable target avoidance, obstacle avoidance, and U-turns—this article provides a framework for evaluating system safety, stability, and comfort through clear definitions, verification requirements, and performance indicators.
-
The Moment to Evaluate Montage Technology Has Arrived
-
![]()
StepOn Has Solved the Monetization Challenge of Large Models with Just a Smartphone
-
![]()
Is a Camera the New AI Safety Guardian? Hikvision Introduces Active Vision Operation Monitoring Gun-Ball Camera at WAIC 2026
-
The Second Half of AI: Cost-Effectiveness Takes Center Stage
-
![]()
Location, Concentration, and Trajectory Tracking: Hikvision’s TDLAS Gas Cloud Imaging Telemetry System Debuts at WAIC 2026
-
The 'AI Study Tour' Under the Original Equipment Manufacturer Model is Set to Create a New Wave of Internet-Famous Science and Innovation Cities
-
![]()
Now, There's a 'Basis' to Curb 'Price Wars': Future Reports of Automakers Setting Low Prices Will Be Probed Under New Rules
-
![]()
WAIC 2026: Farewell to Parameter Races, Full-Chain AI Commercialization