Does Higher Computing Power Always Benefit Autonomous Driving Systems?
 08/14 2025
08/14 2025
 796
796
The "computing power" of an autonomous driving system refers to the hardware performance of the in-vehicle computing platform tasked with executing algorithms for perception, decision-making, planning, and control. In a previous article, I introduced the concept and role of computing power (related reading: Understanding "Computing Power" in Autonomous Driving). Conceptually, stronger computing power enables the system to process more data and more complex models, allowing for quicker and more precise decisions. However, does this mean that higher computing power is always better for autonomous driving systems?
Autonomous driving relies on the fusion of various sensors, including cameras, LiDAR, and millimeter-wave radars, to gather high-precision information about the vehicle's surroundings. The raw data generated by these sensors is voluminous, with high-resolution cameras potentially outputting dozens of frames per second and LiDAR collecting millions of point clouds per second. Without sufficient computing power, timely preprocessing and feature extraction of this data become challenging, leading to reduced frame rates in the perception model, increased latency, and potential safety risks. Robust computing power supports higher resolutions, larger model sizes, and more advanced deep neural networks, ensuring accurate obstacle detection and tracking in complex scenarios. However, excessive computing power can lead to diminishing returns, where further increases beyond a certain threshold provide only marginal performance gains.
In the decision-making and planning stages, the autonomous driving system must base its decisions on perception results, such as lane keeping, overtaking, and obstacle avoidance, generating smooth and safe trajectories. The complexity of decision-making algorithms is directly proportional to the computational resources required. Higher computing power allows the planning algorithm to consider more traffic participants and perform more detailed path optimizations using techniques like global optimization, model predictive control (MPC), or reinforcement learning. However, the decision-making module also has stringent real-time requirements, often needing to complete a planning cycle within milliseconds. Pursuing a global optimal solution excessively can lead to excessive computation time, potentially making it less safe and reliable than methods with higher real-time performance but approximate solutions. Therefore, in designing the planning system, striking a balance between "computational accuracy" and "response speed" is crucial, and an appropriate computing power threshold is more significant than unlimited enhancement.
An increase in computing power often correlates with higher power consumption and heat output. In the in-vehicle environment, power consumption and heat dissipation directly impact the system's stability and longevity. Automotive electronic systems have strict spatial constraints for heat dissipation design, and the layout of air ducts and the volume of passive heat sinks are limited by the vehicle's industrial design. Blindly pursuing peak computing power can lead to overheating of the Electronic Control Unit (ECU) or the risk of thermal runaway. Additionally, excessive power consumption exacerbates range anxiety in electric vehicles. The energy management system must reserve sufficient power budgets for high-computing power platforms, affecting the vehicle's power distribution and architecture. Thus, the improvement of computing power must be synchronized with the enhancement of energy efficiency (i.e., performance per watt) to ensure long-term stable operation in automotive-grade environments.
High-performance computing platform chips and heat dissipation components are costly, especially in low-volume production or high-quality reliability verification. Autonomous vehicles adhere to strict reliability standards for automotive-grade electronic components, requiring comprehensive certifications in areas such as electromagnetic compatibility (EMC), electrical strength, vibration, and temperature cycling tests. Increased hardware investment accounts for a significant portion of the total vehicle cost, affecting the feasibility of commercial promotion. For mobility service providers or original equipment manufacturers (OEMs), the key to practical implementation lies in achieving performance close to or even matching high-computing power platforms at a lower cost through techniques like software and hardware collaboration optimization, algorithm compression, and model pruning.
While computing power serves as the hardware foundation, it is not a panacea. The efficiency of algorithms and the quality of software architecture design also determine the system's overall performance. A well-optimized perception or planning algorithm can run smoothly on a medium-computing power platform. In contrast, an algorithm without code-level optimization and frequent branch prediction and memory jumps may struggle to meet real-time requirements even on high-end GPUs. Therefore, during development, one should not blindly pursue excessive computing power but should also delve into low-level drivers, parallel computing frameworks, and scheduling strategies, maximizing computing power advantages through the collaborative work of multithreading, multiprocessing, and hardware acceleration.
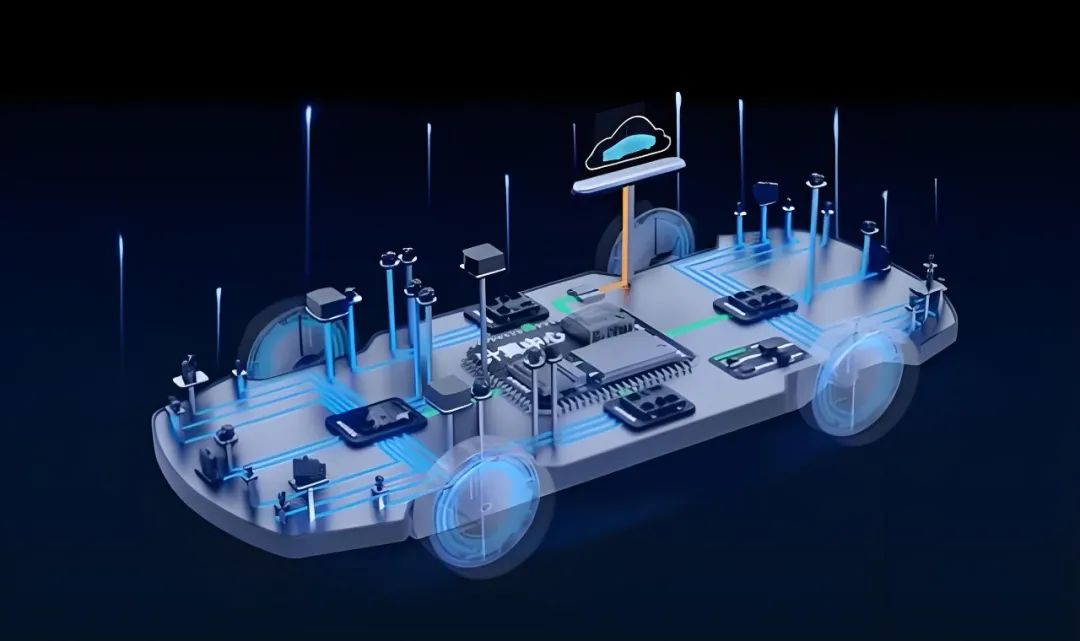
Autonomous driving systems often adopt domain controllers or centralized computing platforms to consolidate ECUs originally scattered across various components into a unified high-performance computing unit, enabling resource sharing and cross-domain collaboration. This centralized architecture fully utilizes large-scale parallel computing units but also demands more concentrated and stable computing power. In contrast, while the computing power units of a distributed architecture are decentralized and scalable, they place higher demands on communication bandwidth, network topology, and synchronization mechanisms. Regardless of the architecture, achieving a proper match between hardware computing power and in-vehicle network performance is essential.
Functional Safety is crucial for autonomous driving systems, with standards like ISO 26262 providing clear provisions on system redundancy and availability. Stronger computing power means more processor units and more complex circuit designs, making it more challenging to achieve high-reliability levels of dual redundancy or fault isolation. In the event of hardware failure, the system must switch to backup computing power promptly to ensure uninterrupted basic perception and control functions. This requires platform designers to fully consider the controllability, diagnosability, and fault recovery capabilities of the system while pursuing computing power.
The enhancement of computing power paves the way for the application of emerging technologies. As deep learning models become increasingly complex, such as the application of Transformer architectures in time series prediction and behavior prediction, or natural language interaction based on Large Language Models (LLMs), they all necessitate powerful runtime computing power support. Additionally, cutting-edge technologies like neuromorphic chips, Field-Programmable Gate Arrays (FPGAs), and Application-Specific Integrated Circuits (ASICs) gain more opportunities for experimentation and validation on high-computing power platforms. From this perspective, the increase in computing power has injected more innovation possibilities into the autonomous driving technology ecosystem.
However, the marginal utility of computing power does not extend indefinitely. Before system deployment, OEMs and autonomous driving service providers typically set a "computing power budget" and conduct algorithm development and performance testing based on this budget. Computing power enhancements beyond the budget may constitute over-design, increasing vehicle costs and power consumption while offering minimal improvement to the user experience. Moreover, the demand for computing power varies across different driving scenarios. On highways, where speeds are high and the environment is relatively controlled, the demand for computing power is more concentrated on multi-lane fusion and high-precision positioning. In complex urban road scenarios involving pedestrians, bicycles, and other traffic participants, higher perception accuracy and decision-making complexity are required, but comprehensive coverage of all scenarios cannot be achieved solely through excessive computing power.
Based on the above multi-dimensional analysis, we can conclude that while computing power is a vital foundation for the stable operation of autonomous driving systems, it is not the case that more is always better. System design must adopt a holistic approach, balancing algorithm efficiency, system architecture, energy consumption and cost, and safety and reliability. Through software and hardware collaboration optimization, lightweight model design, functional layering and distributed architecture, as well as reasonable computing power budget strategies, the advantages of computing power can be synergized with vehicle performance, cost-effectiveness, and product safety to foster the sustainable development of autonomous driving technology.
-- END --
-
![]()
The Unstoppable Rise of 'Optical Progress and Copper Decline': Sunny Optical’s Strategic Vision for the Next Decade
-
![]()
AI + Going Global in the Second Half: No Intermission for Robot Vacuum Cleaners
-
![]()
The Suffering Endured in E-commerce, Walmart Doesn't Want to Repeat in AI
-
![]()
What Does the Doubling of New Energy Vehicle Exports Mean?
-
![]()
Ghosn: 'Only I Can Save Nissan'
-
![]()
Volkswagen Lays Off 100,000 Employees, The Elephant Sits Down
-
![]()
Expanding Production Capacity! Yutong Optics Acquires Approximately 1.5 Hectares of Industrial Land in Chang'an, Dongguan
-
![]()
Why Is Nokia Making a Comeback in the AI Era?







