Post-90s Startup Backed by Tsinghua Raises Over 700 Million Yuan in a Year, Unveiling a Versatile Embodied Intelligence Brain
 02/27 2025
02/27 2025
 784
784

Author | Xiang Xin
An embodied intelligence startup favored by Ant Group and miHoYo has secured another substantial funding round.
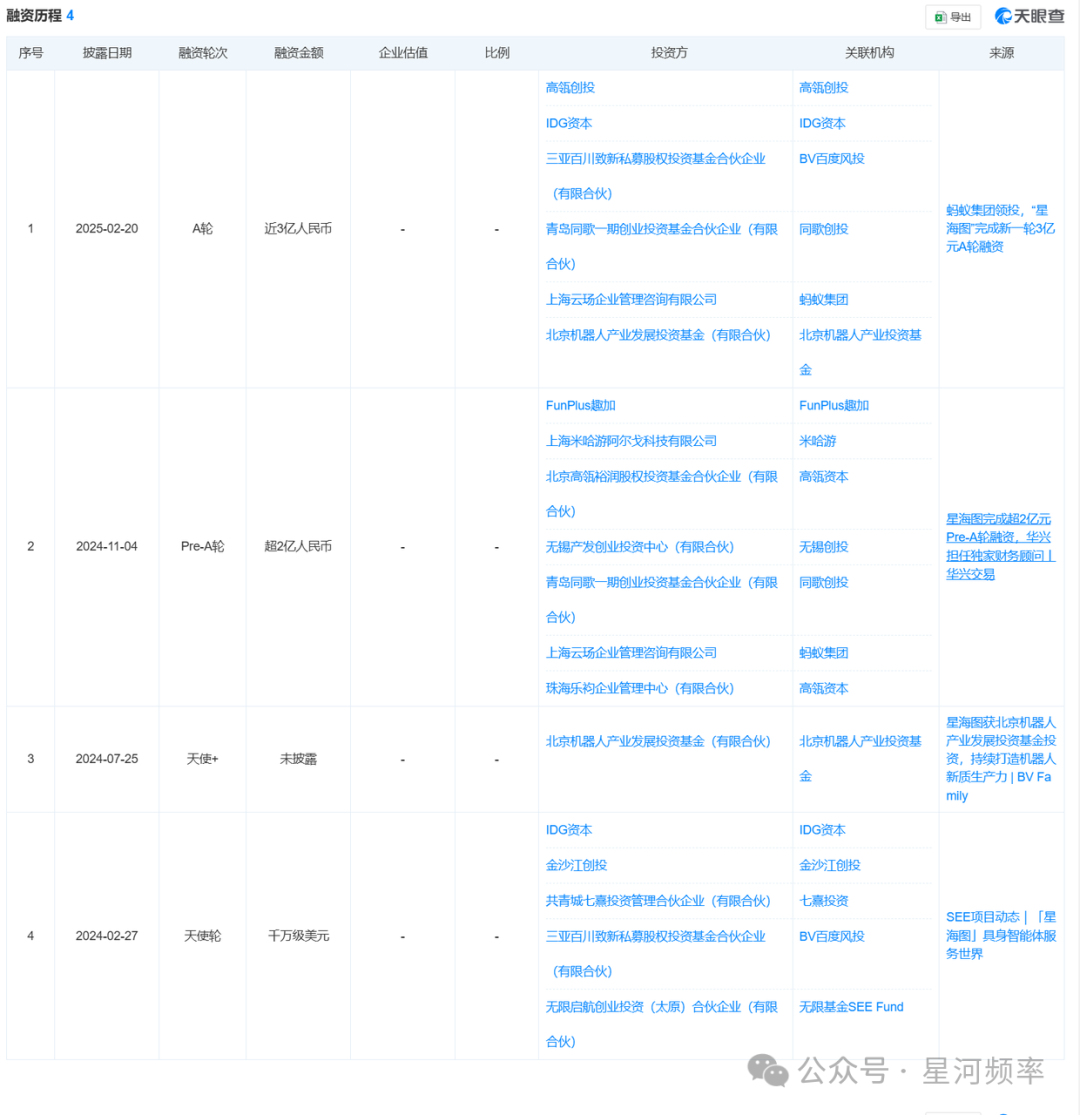
On February 20, StarAtlas announced the completion of Series A funding totaling nearly 300 million yuan, which will catalyze the research, development, and validation of embodied foundational models.
This round was primarily led by existing shareholders, including Ant Group, Hillhouse Capital, IDG Capital, Beijing Robotics Industry Fund, Baidu Ventures, and Tongge Ventures.
Founded in September 2023, StarAtlas envisions the ultimate goal of embodied intelligence as "one brain, multiple forms".
Aligned with this vision, StarAtlas has launched the RSR robotic spatial intelligence engine, the EFM embodied foundational model, and the R1 series of wheeled humanoid robots. These innovations address data scarcity and operational control challenges in embodied intelligence, providing hardware for scientific research and development.
Since obtaining its initial tens of millions of dollars in funding in February 2024, StarAtlas has completed four funding rounds within a year, amassing over 700 million yuan in total.
This makes StarAtlas the most funded embodied intelligence startup of the past year, following Galaxy General.
In November 2024, StarAtlas received its first strategic investment from Ant Group, with Shanghai miHoYo Argotech, a wholly-owned subsidiary of miHoYo, also participating in this round.
StarAtlas's ability to attract significant capital within a short period is attributed to its founding team's cutting-edge scientific research background and extensive experience in product development and mass production.
Three of StarAtlas's four founders hail from Tsinghua University, and three have transitioned from the autonomous driving industry:
Gao Jiyang, a Tsinghua graduate; Zhao Xing and Xu Huazhe, both assistant professors at Tsinghua's Institute for Interdisciplinary Information Sciences; and Li Tianwei, like Gao Jiyang and Zhao Xing, has worked at renowned autonomous driving companies such as Waymo and Momenta.
With their prestigious academic backgrounds and extensive experience in the autonomous driving industry, StarAtlas's journey toward funding and technological development has been relatively seamless.

Tsinghua + Autonomous Driving Background: A Symbiosis of Academic Innovation and Industry Expertise
If the core talent composition of StarAtlas were to be symbolized, a triangle would aptly represent it.
Zhao Xing, Xu Huazhe, and Li Tianwei form the triangle's vertices, responsible for spatial intelligence, operational intelligence, and ontology research and development, respectively.
Gao Jiyang stands at the triangle's core, overseeing all technological research and development at the company.

After graduating from Tsinghua University, Gao Jiyang pursued further studies at the University of Southern California under Professor Ram, a computer vision expert, completing his PhD in computer vision in just three years. He then worked at Waymo and Momenta.
At Waymo, Gao Jiyang was responsible for perception-related tasks and published the widely accepted VectorNet and TNT series of prediction and planning algorithms.
Waymo's reliance on Google's world-leading engineering system honed Gao Jiyang's engineering skills.
At Momenta, Gao Jiyang went through the entire process of refining products for mass production.
At Momenta, Gao Jiyang developed multiple modules and products, including perception, localization, planning, and control, quickly achieving mass production.
His experience at these two autonomous driving giants allowed Gao Jiyang to develop evenly in professional skills, practical experience, and market insights. He possesses deep expertise in engineering technology, product mass production, and operations.
Zhao Xing and Xu Huazhe are referred to by investors as the team's two "standout AI players".
Zhao Xing is an assistant professor and doctoral supervisor at Tsinghua's Institute for Interdisciplinary Information Sciences. He previously served as a research scientist at Waymo and is primarily responsible for visual perception and mobile navigation technology at StarAtlas.
Dr. Xu Huazhe graduated from the Artificial Intelligence Research Center at the University of Berkeley and is currently an assistant professor at Tsinghua's Institute for Interdisciplinary Information Sciences. He heads Tsinghua's "Embodied AI" laboratory and is responsible for researching and developing operational technologies for embodied intelligence at StarAtlas.
Li Tianwei holds a master's degree from University College London and was a colleague of Gao Jiyang at Momenta. He is currently responsible for the development of the entire robot, including ontology, middleware, and software and hardware systems, at StarAtlas.
All four founders have prestigious academic backgrounds, and three have undergone in-depth training in cutting-edge technology and engineering practice at autonomous driving companies.
This blend of academic foundations and industry expertise endows StarAtlas with robust and unique research and development capabilities.

Focusing on Brain Development: Robots Starting at 199,000 Yuan
Gao Jiyang believes that embodied intelligence encompasses two technical lines: intelligence and hardware ontology, with the commercialization bottleneck lying in the brain rather than the form.
Based on this technical approach, StarAtlas first developed the spatial intelligence engine RSR and the embodied foundational model EFM, corresponding to the robot's spatial intelligence and operational intelligence, respectively.
StarAtlas's spatial intelligence engine RSR is the world's first Real2Sim2Real (reality-simulation-reality) engine for robots.
This technology can achieve centimeter-level accuracy and large-scale scene reconstruction of tens of thousands of square meters with a single shot from a consumer-grade 2D camera, regardless of the shooting angle.
In other words, you only need to provide a casually taken photo, and it can perform three-dimensional reconstruction based on that single image, generating highly realistic new-view rendering images and reconstructing scenes equivalent to 1.4 football fields.

The significance of the spatial intelligence engine RSR lies not only in simplifying the process of three-dimensional scene reconstruction but also in providing powerful data support.
It can derive thousands of data entries from a single real-world data entry, addressing the data scarcity issue faced by embodied intelligence.
This solution reduces data acquisition costs by 99% compared to professional equipment and achieves zero annotation costs compared to data collection and annotation schemes. Compared to simulation schemes, it eliminates the problem of data deviation between simulation and reality.
By recreating real-world scenes, robots can learn to understand the environment in three-dimensional space and exercise their mobility and operational capabilities.
The embodied foundational model EFM is a universal edge-side model that solves the problem of dual-arm manipulation for robots.
The 3D Diffusion Policy (DP3) proposed by Xu Huazhe can achieve precise control of robot manipulation with only 40 demonstration data entries, boasting a success rate of up to 85% and demonstrating excellent generalization performance.
While StarAtlas emphasizes the importance of the brain, for the robot's brain to function, it still requires hardware ontology as a support for training and evaluating model application effects.
Therefore, StarAtlas released its first humanoid robot R1 in October 2024 and followed up with the R1 series of humanoid robots in January of this year, offering three different configurations.
The R1 series robots are wheeled humanoid robots available in three versions: Light, Standard, and Pro, priced starting at 199,000 yuan.
The Standard version of R1 stands at 170cm, has 24 degrees of freedom, a maximum dual-arm load of 10kg, a vertical working range of up to 2 meters, and a horizontal working radius of up to 70 centimeters.

After AI model training, R1 can independently complete tasks such as cleaning desktop trash.

Zhao Xing believes that there will be a Cambrian explosion of robotic species in the future: various robots will perform diverse tasks in our society, all controlled by a universal "brain".
He revealed in an interview last year that StarAtlas will release an integrated next-generation spatial intelligence model that understands the world, namely a three-dimensional world model, this year.
With the injection of these 300 million yuan in funds, StarAtlas's model research and development will further accelerate, potentially breaking through the embodied intelligence research and development bottleneck, providing a new paradigm for industry development, and mapping out the star atlas of embodied intelligence.
-
![]()
Hardware is the skeleton, AI is the soul, and data integrates the two
-
![]()
China’s AI Industry: A Unified Pivot Towards Monetization?
-
![]()
New Progress! Infineon Completes Acquisition of ams OSRAM's Non-Optical Sensor Business
-
![]()
35 Million Bet on an Optical Future! Tengjing Technology Makes a Move in AR
-
![]()
Why World Models Get Stuck on Construction Roads in Autonomous Driving Applications
-
Alibaba Initiates Cultural Transformation: Is Jack Ma Making a Strategic Comeback?
-
Tianfeng Heads to Hong Kong for IPO with RMB 3.8 Billion in Funds: Xingyu's Cross-Border Foray into Embodied AI Faces Uncertain Future
-
![]()
Mengshi Auto’s High-End Aspirations Dashed: Huawei Partnership Fails to Revive Sales, New Model’s Entry Price Dips Below 300,000 Yuan