Is the "Classification of Vehicle Driving Automation" Better Suited for China's Autonomous Driving Development?
 05/19 2025
05/19 2025
 714
714
With continuous advancements in intelligent and connected technologies, countries worldwide are deploying vehicle driving automation systems. A unified classification standard serves as a cornerstone for technical evaluation and communication within the industry, while also supporting regulatory authorities in implementing safety monitoring and certification at various stages. For years, the classification of autonomous driving levels has primarily adhered to the SAE J3016 standard, titled "Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems," which categorizes autonomous driving into six levels, ranging from L0 to L5.
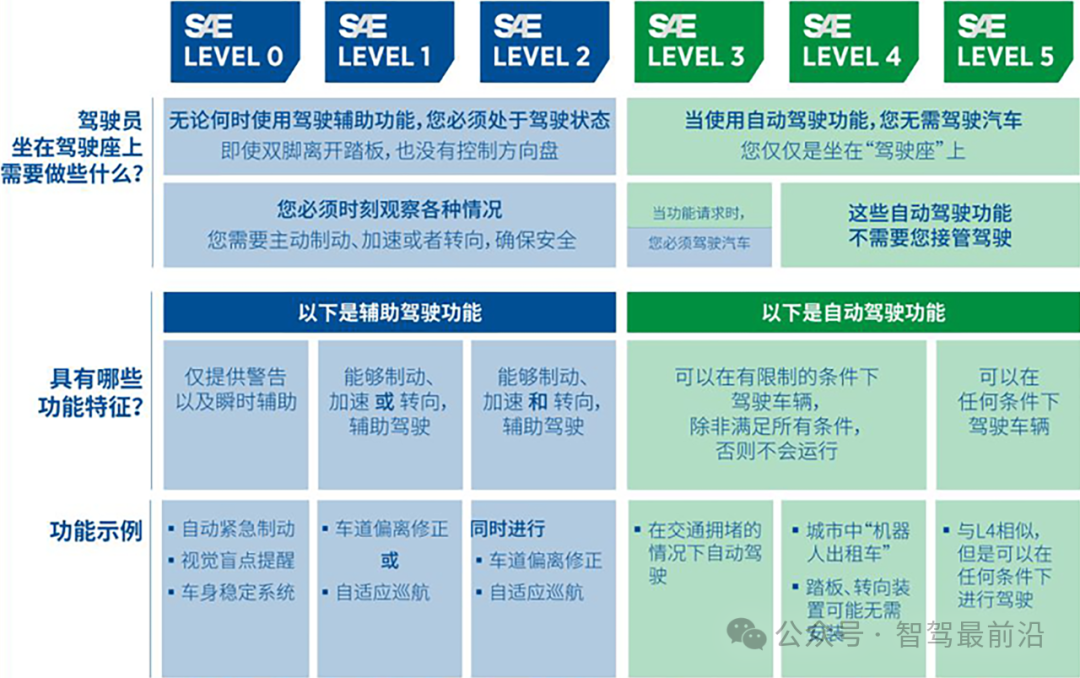
SAE J3016 Autonomous Driving Levels
As autonomous driving accelerates its implementation in China, a standard tailored to the domestic market's needs is imperative. On August 20, 2021, the national standard GB/T 40429-2021, titled "Classification of Vehicle Driving Automation," proposed by the Ministry of Industry and Information Technology under the jurisdiction of the National Technical Committee on Auto Standardization, was approved and released by the State Administration for Market Regulation and the Standardization Administration of the People's Republic of China (National Standard Announcement No. 11 of 2021). This standard came into effect on March 1, 2022, and divides autonomous driving functions into six levels from 0 to 5, based on the system's depth of operation and scope of autonomy in dynamic driving tasks (DDT). This classification aligns with the ideal range from basic risk warnings to fully "driverless" capabilities, aiding technology R&D teams, platform operators, and regulatory agencies in clarifying functional boundaries, verifying in stages, and promoting phased practical implementation and commercial deployment.
At the most basic Level 0 (Emergency Assistance), the system does not participate in continuous vehicle manipulation but issues warnings or brief interventions when potential risks, such as forward collision warnings (FCW), lane departure warnings (LDW), and automatic emergency braking (AEB), are detected. The primary technical challenge at this stage is accurately and efficiently perceiving environmental changes and triggering timely warnings while maintaining a low false alarm rate to avoid disrupting the driver's normal operation. Level 0 functions offer users a "last mile" of safety prevention, helping drivers respond swiftly in emergencies and reducing accident probabilities. For automakers, Level 0 serves as a "trial and error" ground for perception algorithms and hardware layout, accumulating substantial road test data and engineering experience for higher-level sensor fusion and control strategies.
At Level 1 (Partial Driving Assistance), the system continuously performs single-dimensional vehicle manipulation within limited operational design conditions (ODC), either controlling longitudinal acceleration and deceleration (e.g., Adaptive Cruise Control, ACC) or lateral steering (e.g., Lane Keeping Assist, LKA). Unlike Level 0, which merely "sees" risks, Level 1 "hands on" to intervene in driving, significantly reducing the user's burden in maintaining speed and lane position. The system needs to measure and predict key indicators such as distance to the front target, vehicle speed, and lane line deviation in real-time, adjusting braking and steering servo actions through PID control, fuzzy logic, or model-based predictive control algorithms to maintain a safe distance from the preceding vehicle or centered lane driving. Although the driver still needs to monitor the process and quickly resume manual control upon system takeover requests, Level 1 has made functions like ACC and LKA standard in current mid-to-high-end models, significantly enhancing ride comfort and reducing safety hazards from fatigue during long drives.
Level 2 (Combined Driving Assistance) represents a further integration of perception and control capabilities, merging lateral and longitudinal control into one. Typical examples include Tesla's Autopilot and GM's Super Cruise. This level of system can autonomously follow the preceding vehicle and maintain lane position within ODC, integrating object and event detection and response (OEDR) functions to automatically change lanes or recognize speed limit signs and adjust vehicle speed. While this "semi-automatic" driving still legally requires the driver to keep hands on the steering wheel and attention on the road, the system's real-time multi-modal sensor fusion—complementing and verifying data from millimeter-wave radars, cameras, LiDAR (optional), etc., through Kalman filtering or deep learning models—enables the vehicle to perform highly consistent and smooth automatic following and lane changing in relatively closed scenarios like highways. The technical focus of Level 2 lies in enhancing both perception algorithm accuracy and control strategy robustness, along with continuous convergence and iteration through extensive real-world road testing. This makes Level 2 functions not only meet commercial deployment requirements but also provide crucial foundational data and lessons learned for subsequent higher-level redundancy design and safety verification.
Upon upgrading to Level 3 (Conditional Autonomous Driving), the system's capabilities extend to fully assuming the dynamic driving task under limited ODC conditions, encompassing functions such as lateral and longitudinal control, OEDR, and path decision-making. Typical application scenarios include Traffic Jam Pilot for congested highway sections or Level 3 Pilot systems for specific highway segments. When activated, the driver can shift focus from immediate road conditions to other non-driving activities (e.g., checking navigation or handling phone calls) and only needs to retake control after the system issues a takeover request (typically with a maximum response time of 5-10 seconds). The implementation of Level 3 validates the algorithm's risk prediction capabilities in complex traffic environments and also fosters the development and commercial application of in-vehicle human-machine interfaces and driver monitoring systems (DMS).
Level 4 (Highly Automated Driving) further alleviates the need for continuous driver monitoring. Within limited ODC or Operational Design Domain (ODD), the system can complete all dynamic driving tasks without human supervision, fully liberating passengers. Typical applications include autonomous taxis (Robo-Taxi) or logistics fleets in specific urban areas, such as Waymo's operations in Silicon Valley and Phoenix, USA, and Baidu Apollo's demonstration routes in Shunyi Eco-city, Beijing.
Level 4 systems rely on the coordination of infrastructure like high-definition maps, V2X (Vehicle-to-Everything) communication, and edge computing, enabling vehicles to accurately plan routes and dynamically adjust strategies in a closed-loop environment with pre-surveyed routes and signal coordination with roadside units. At the hardware level, Level 4 necessitates dual or multiple redundancy designs for multiple sensors and chips to ensure that a single point of failure doesn't compromise the entire system; at the system level, it requires real-time diagnosis and health monitoring functions to swiftly switch to a backup system or execute Minimum Risk Conditions (MRC) when components or algorithms malfunction.
To ensure safety, Level 4 systems must be pre-designed with a comprehensive "takeover request - delayed response - MRC" process: upon detecting potential ODC condition failures (e.g., encountering extremely dark weather or sudden light changes at tunnel exits) or hardware/software failures, the system must maintain autonomous driving as long as possible to gain takeover time; if the user fails to respond promptly, the vehicle needs to smoothly decelerate to a stop and activate hazard warning lights to mitigate road risks. The commercial significance of Level 4 lies in not only reducing dependence on traditional taxi drivers but also significantly cutting labor costs in controlled environments like logistics and campus transportation, thereby facilitating the pilot demonstration of truly "unsupervised autonomous driving".
The ultimate Level 5 (Fully Autonomous Driving) represents the pinnacle of autonomous driving technology and an ideal state of "full scenario, zero restrictions." On any road, in any climate, and in any traffic environment, the system can independently complete the entire journey from departure to destination without human intervention. Achieving Level 5 necessitates not only advanced multi-modal perception, deep learning decision-making, and efficient execution control but also the establishment of a globally extensive, real-time updated high-definition map and V2X infrastructure, along with highly mature cloud-based collaborative computing and large-scale data learning capabilities. Additionally, Level 5 must address non-technical challenges such as identifying and responding to extremely rare scenarios (corner cases), cross-regional regulatory adaptation, and insurance liability allocation. While there is currently no true Level 5 commercial system in unrestricted open-road environments, major technology companies are continuously testing and optimizing this full-stack solution through sandbox testing and small-scale commercial demonstrations.
The subdivision of autonomous driving technology into six levels aims to strike a balance between technological maturity and application safety, providing quantifiable standards for technology verification and capability assessment at each stage, along with a hierarchical path for commercial promotion and regulatory review. From "risk warning" to "partial assistance," to "full-stack automation," and ultimately "full-scenario unmanned," this classification system not only helps R&D teams identify core technical challenges at each level but also enables regulatory authorities to develop targeted testing procedures, certification specifications, and legal frameworks during each functional upgrade, thereby accelerating the autonomous driving industry's transition from a conceptual blue ocean to large-scale application with heightened safety. Simultaneously, this classification facilitates consumers and operators in more intuitively understanding vehicle automation capabilities and boundaries, fostering clearer expectations and safety guarantees when selecting and using such systems.
The "Classification of Vehicle Driving Automation" standard, through clear level classification and systematic technical judgment methods, not only guides the development of domestic autonomous driving technology but also contributes Chinese expertise to the global autonomous driving standardization process. In the future, with the synergy and maturity of algorithmic innovation, sensor iteration, vehicle-road coordination, and the regulatory system, this six-level classification framework will undoubtedly evolve alongside the industry, paving the way for truly safe, efficient, and sustainable smart travel.
-- END --
-
![]()
Market Share Dilemma: DJI vs. Insta360—Is It '40-40' or '60-30'?
-
![]()
Market Share Dilemma: DJI vs. Insta360 – A '40-40 Split' or '60-30 Split'?
-
![]()
It's Kunlunxin's Turn to Play
-
![]()
Is the New Performance Peak Just the Starting Point? What Will Be Crystal-Optech's Next Destination?
-
![]()
Goertek Pours 69 Million Yuan into Elite Precision: Ramping Up Optical Precision Manufacturing and R&D Capabilities
-
![]()
Avatr Attempts HKEX Listing Again, With 20,000 Vehicles Sold in First Five Months
-
![]()
NVIDIA Announces 10-Fold Production Capacity Increase in 2 Years, Disrupting the Energy Storage Industry
-
![]()
AI Enters the Second Half: Models Are No Longer Scarce, What’s Truly Scarce Are Computing Power, Scenarios, and Trust