Can autonomous driving only be achieved through end-to-end solutions?
 08/12 2024
08/12 2024
 638
638
With the rapid development of autonomous driving technology, more and more companies are exploring smarter and more efficient solutions. With the entry of AI large models, many new technologies have emerged in autonomous driving. The technical path in the intelligent driving industry has evolved from CNN, RNN, GAN, to Transformer large models. Last year, the mainstream industry solution was still intelligent driving in urban areas with light, high-precision maps, but this year, everyone's focus has shifted to end-to-end (E2E). As an emerging technical path, end-to-end solutions are gradually attracting widespread attention within the industry. The application of end-to-end solutions in autonomous driving means that the entire driving process is completed by a unified neural network system, integrating perception, decision-making, and control into one seamless process. This approach differs significantly from traditional modular methods in both architectural design and implementation.
In March 2024, Tesla began widely rolling out FSD V12 across North America. This end-to-end intelligent driving system performed exceptionally well, offering practitioners and users an unprecedented improvement in technology experience. This has become the most significant driving force behind the rapid formation of a broad consensus around the end-to-end autonomous driving technical path.

What is End-to-End Autonomous Driving?
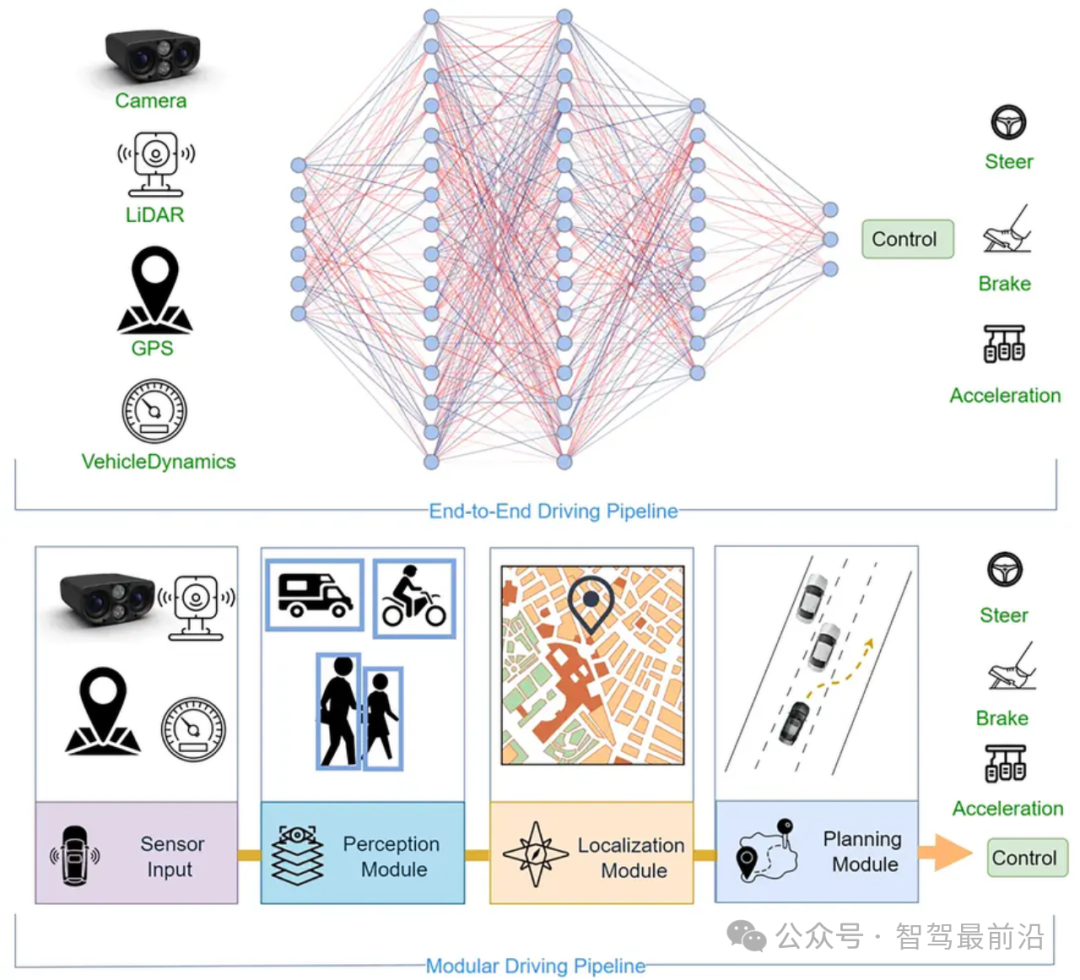
End-to-end autonomous driving solutions represent an integrated, data-driven technical path aimed at simplifying the architectural design of autonomous driving systems. Unlike the modular architecture of traditional autonomous driving systems, the end-to-end approach seeks to complete the entire driving process through a unified neural network system, directly from sensor inputs (such as cameras, LiDAR, etc.) to control outputs (e.g., steering wheel angle, throttle, and brake force). The core idea of this method is to replace multiple independent modules in traditional systems with a deep learning model. Through extensive data training, the system can learn, perceive, and make decisions on its own. In end-to-end learning, there is generally no need to explicitly define the functions of different modules or stages; the intermediate process requires no human intervention. End-to-end learning training data takes the form of "input-output" pairs and does not require any additional information. Therefore, like deep learning, end-to-end learning also aims to solve the problem of contribution allocation.
1. Traditional Modular Autonomous Driving System
Traditional autonomous driving systems are typically divided into the following main modules:
Perception Module: Responsible for collecting environmental data and identifying key information such as roads, obstacles, and pedestrians. The perception module relies on various sensors such as cameras, LiDAR, radar, as well as image processing and object detection algorithms.
Localization Module: Accurately determines the vehicle's position in the environment using GPS, IMU (Inertial Measurement Unit), map data, and other means.
Path Planning Module: Based on perception and localization data, plans the optimal path for the vehicle, considering factors such as traffic rules and road conditions.
Decision-Making Module: Determines the specific actions the vehicle should take during driving, such as overtaking, yielding, slowing down, etc.
Control Module: Executes the instructions from the decision-making module, directly controlling the vehicle's steering, acceleration, and braking.
Each module works independently, responsible for different functions. The interfaces between modules need to be carefully designed to ensure the coordinated operation of the entire system.
2. Realization of End-to-End Autonomous Driving
End-to-end autonomous driving systems aim to break the modular constraints by generating control outputs directly from sensor inputs through a unified neural network. In such systems:
Sensor Inputs: Include data from cameras, LiDAR, mmWave radar, etc., which are directly used as inputs.
Deep Learning Model: Typically a Convolutional Neural Network (CNN), Recurrent Neural Network (RNN), or their variants, responsible for extracting features from input data, performing environmental perception, path planning, decision-making, and ultimately generating vehicle control commands.
Control Outputs: The model directly outputs vehicle control commands, such as steering wheel angle, throttle, and brake force.
In this process, there are no clear module divisions or predefined rules. All tasks are completed by a unified neural network system. This approach relies on large-scale end-to-end training data to teach the model how to drive.
3. Simplified Understanding of End-to-EndImagine two villages on an island, called Perception Village and Execution Village. The villagers of Perception Village have always needed to send letters to the villagers of Execution Village, but the villages are far apart, requiring messengers to deliver the letters. Initially, letter delivery was simple; villagers in Perception Village just told the messenger who the letter was for but didn't specify the recipient's address in Execution Village. When the messenger arrived in Execution Village, they had to knock on every door to ask if the recipient lived there. Before delivering the letter, everyone would look at it, causing it to crease and some information to become illegible (artificially defining naming rules, requiring the decision-making layer to verify each rule and execute the corresponding action).

Due to the inefficiency of this information transfer, and the need to knock on more doors for each additional household in Execution Village, the messenger struggled to handle unknown recipient names (new scenarios). To solve this, the messenger decided on a new, unified delivery method: labeling each household in Execution Village by name (big data learning). When villagers in Perception Village sent letters to Execution Village, the messenger would write the corresponding household number on the letter (an illustrative example of the deep learning process). Upon arrival, the messenger could quickly deliver the letter by looking at the household number on the letter and finding the corresponding house. This prevented damage to the letter and made it easy to add new recipient numbers, increasing delivery efficiency!
While this short story may not fully encapsulate end-to-end concepts, it offers a simplified understanding. Please share your thoughts in the comments if you have any feedback.
Advantages of End-to-End Solutions
1. Simplified Architectural Design
Reduced Complexity: End-to-end systems simplify traditional multi-module architectures into a unified deep learning model, significantly reducing system complexity. In traditional systems, each module requires separate development, testing, and debugging, whereas the end-to-end approach streamlines the process by requiring only one model to be developed and trained.
Reduced Interface Design: Traditional systems require careful interface design between modules to ensure seamless data transfer and processing. In end-to-end systems, all processing is handled through a single model, eliminating the need for complex interfaces and simplifying system integration.
2. Reduced Human Intervention
Data-Driven: Traditional systems rely on manually set rules and parameters, such as thresholds for object detection and path planning weights. In contrast, end-to-end methods are data-driven, eliminating the need for predefined rules and instead training models on vast amounts of real data to automatically learn and handle diverse driving scenarios.
Automatic Optimization: During training, end-to-end systems can automatically optimize parameters, reducing the need for manual tuning. This enables them to better adapt to complex and dynamic driving environments, such as varying weather conditions and challenging road situations.
3. Potential Performance Enhancements
Power of Deep Learning: Deep learning models excel in tasks like image processing and pattern recognition. End-to-end systems leverage this capability to learn high-level features directly from sensor inputs, improving overall system performance.
Improved Scene Understanding: By capturing subtle environmental nuances, such as pedestrian behavior and complex traffic situations, end-to-end systems can outperform traditional methods in certain complex scenarios.
4. Enhanced Adaptability
Continuous Learning: End-to-end systems can adapt to new road conditions and driving scenarios through continuous learning and data updates. This means they can rapidly adjust to new environments by incorporating new data into their training, enhancing their versatility.
Diverse Adaptation: Since end-to-end systems learn directly from data, they can flexibly adjust their behavior strategies across different regions, weather conditions, and traffic regulations.
Disadvantages of End-to-End Solutions
1. High Data Requirements
Extensive Data Needs: End-to-end system training demands vast amounts of driving data, encompassing diverse scenarios, anomalies, and extreme conditions. This poses significant challenges for data collection, processing, and storage capabilities.
Complexity of Data Labeling: Training end-to-end models necessitates precisely labeled data, a time-consuming and costly process. Data collection and labeling for anomalous situations can be even more challenging.
2. Black Box Problem
Opaque Decision-Making: End-to-end systems rely on deep learning models, making their decision-making processes difficult to explain. This 'black box' nature lacks transparency, making it unclear why the system makes certain decisions in certain scenarios.
Safety and Compliance Challenges: In practical applications, the unexplainability of end-to-end systems may raise safety and compliance concerns. For instance, when systems make errors, it can be challenging to determine accountability, hindering accident analysis and liability determination.
3. Limited Generalization Ability
Constraints of Training Data: End-to-end system performance relies on the diversity and coverage of training data. When faced with unfamiliar scenarios or conditions, these systems may struggle to make accurate decisions, indicating limited generalization ability.
Challenges in New Scenarios: While end-to-end systems can adapt to new scenarios through continuous learning, they may underperform in entirely new, extreme, or complex situations compared to specially designed modular systems.
4. Difficulty Handling Complex Tasks
Single Model Limitations: End-to-end systems rely on a single neural network model, which can be limiting when handling highly complex tasks. For instance, a single model may struggle to handle multi-lane highway traffic or intricate urban intersections.
Increasing Scene Complexity: As driving scenarios become more complex, end-to-end systems must manage more variables, potentially degrading performance in extreme cases or becoming unable to cope.
Impact of End-to-End Solutions on the Autonomous Driving Industry
1. Driving Technological Innovation
Integration of AI and Autonomous Driving: End-to-end solutions represent the deep application of AI technology in autonomous driving. By enabling systems to learn from data through deep learning models, they transcend traditional algorithmic constraints, fostering innovative algorithms and technologies that enhance autonomous driving intelligence.
Catalyzing New Technical Paths: The development of end-to-end methods may spur the emergence of hybrid architectures or enhanced models tailored for complex driving tasks, such as combinations of traditional modular systems and end-to-end models, overcoming the limitations of standalone models.
2. Changing R&D Paradigms
Shifting Talent Demands: End-to-end system development leans more heavily on data scientists and deep learning experts than traditional engineers and domain experts. This shift may reshape the talent landscape and training directions within the autonomous driving industry, elevating the importance of data-driven R&D paradigms.
Evolution of R&D Processes: The adoption of end-to-end methods necessitates adjustments to traditional modular development processes. Companies may need to redesign their R&D processes to accommodate data-driven development models, encompassing comprehensive optimizations in data collection, annotation, model training, and deployment.
3. Accelerating Commercialization
Rapid Deployment in Specific Scenarios: End-to-end systems may offer advantages over traditional methods in specific scenarios (e.g., highways, enclosed parks), potentially facilitating quicker commercialization. This advantage can help autonomous driving technologies secure early market shares and expand into broader application scenarios.
Transformation of Business Models: As end-to-end methods gain traction, autonomous driving technology's business models may evolve. For instance, data-based service models (e.g., continuously updated and optimized driving models) could emerge as new revenue streams.
4. Challenging Regulations and Standards
Regulatory Adaptation: End-to-end systems' black box nature may necessitate adjustments to existing autonomous driving regulations and standards to accommodate this new technical path. Crafting regulations that ensure safety, transparency, and accountability for end-to-end systems poses significant industry challenges.
Standardization Difficulties: End-to-end methods' diversity and heavy reliance on data complicate the formulation of unified industry standards. Standardization hurdles may delay technology adoption and impact the industry's coordinated development.
5. Influencing Supply and Industrial Chains
Restructuring Industrial Chains: The promotion of end-to-end methods may reduce reliance on traditional modules, altering the structure of existing autonomous driving supply chains. Suppliers specializing in specific modules may face repositioning challenges.
Opportunities for Emerging Companies: The prevalence of end-to-end methods could open market entry doors for emerging companies, particularly those with strengths in data collection, processing, annotation, and deep learning model development.
Conclusion
End-to-end autonomous driving solutions, as innovative technical paths, demonstrate immense potential in simplifying system architecture, reducing human intervention, enhancing performance, and improving adaptability. However, end-to-end methods face challenges in high data demands, black box issues, limited generalization abilities, and difficulties in handling complex tasks. These issues indicate that end-to-end solutions are not yet fully mature, yet their potential advantages continue to attract significant industry interest.
As technology evolves, end-to-end methods are expected to find applications in more driving scenarios, profoundly impacting the commercialization of autonomous driving technology. In the future development of the industry, end-to-end solutions may emerge as a crucial force driving autonomous driving technology forward. Nevertheless, addressing inherent challenges and formulating corresponding regulations and standards remain pressing issues for the industry to resolve. Facing this emerging technical path, the autonomous driving industry must strike a balance between technological innovation and regulatory formulation to ensure that end-to-end methods truly deliver value to future transportation systems.
This article not only explores the technical details of the end-to-end autonomous driving solution but also analyzes its extensive impact on the industry. As more companies invest in research and development of end-to-end methods, we have reason to expect more breakthroughs and applications of this technology in the coming years.
-
![]()
2,423 Units Sold in June, Marking a 120% Surge: 'Gold-Standard Volkswagen' Makes a Bold Stride Forward
-
![]()
Nostalgia for Ghosn Won't Save Nissan
-
![]()
Horizon and Momenta: A Collision Course
-
![]()
The Wave of Layoffs in Major Automobile Manufacturers Has Arrived! Some Receive Compensation of Hundreds of Thousands, While Others Leave Empty-Handed
-
![]()
A Bowl of Tomato Scrambled Eggs Can’t Define the Trillion-Yuan Household Robot Market
-
![]()
Huawei-Supported Firm Strikes Again! Avatr Secures L3 Autonomous Driving License
-
![]()
Lingguang Shifts Leadership, Ant’s Afu Takes a Step Back
-
![]()
WAIC Reveals Four Robust Innovations, Unveiling Joyson Electronic’s Dual-Track Strategy