The Data Loop in Autonomous Driving: A Crucial Mechanism for Continuous Optimization
 07/08 2025
07/08 2025
 708
708
In recent years, autonomous driving technology has emerged as a hot topic in the global technology landscape, serving as a pivotal force driving revolutionary changes in the transportation sector. Within this domain, data is hailed as the 'fuel' that propels technological advancement, with the efficiency and quality of its collection, analysis, and feedback directly influencing the performance and safety of autonomous driving systems. As the complexity of autonomous driving technology escalates, traditional data processing methods have proven inadequate, necessitating the introduction of the data loop concept, which has since become the focal point for leading autonomous driving companies.
The data loop is a systematic process encompassing the collection, processing, and feedback of data generated during vehicle operation, ultimately applying these insights to system optimization. This mechanism facilitates continuous algorithm iteration, perception system enhancement, and decision-making planning, ultimately optimizing long-term performance. Across the autonomous driving industry, from single-vehicle intelligence to vehicle-road coordination, and from low-speed parks to intricate urban traffic scenarios, an efficient data loop system is indispensable.
With the rapid evolution of sensor technology, computing power, and communication networks, the volume of data generated by autonomous driving systems has soared, encompassing multiple dimensions such as perception, decision-making, and control. The value of these data extends beyond current scenario optimization, serving as the foundation for future system learning and advancement. However, translating this vast amount of data into actionable feedback that directly contributes to technological progress poses significant technical and engineering challenges. Thus, understanding and constructing a robust data loop system is essential for the development and commercialization of autonomous driving technology.
Concept and Connotation of the Data Loop
The core concept of the data loop in autonomous driving revolves around achieving system self-optimization and continuous evolution through the collection, processing, analysis, and feedback of data. Autonomous driving systems rely on extensive data from various sensors and the external environment for real-time perception, decision-making, and control. The data loop forms a cyclical process where data is continuously fed into the system, optimized, and corrected in each feedback loop, thereby enhancing the overall performance and safety of the autonomous driving system.
This loop promotes real-time performance and adaptability. Autonomous vehicles must respond swiftly based on real-time environmental data collected from sensors like radars, cameras, LiDAR, and others. These data sources are continuously transmitted to perception, decision-making, and planning modules, enabling the system to react instantly and adjust according to the latest traffic conditions. This is not a one-way process but a continuous feedback loop where real-time data influences the system's judgments and actions, bolstering its adaptability to complex dynamic scenarios.
Moreover, the data loop is characterized by continuous optimization. Initially, autonomous driving systems might struggle with unfamiliar complex road environments or slow reactions to abnormal situations. However, as data accumulates through vehicle operation, the system can continually learn and refine its algorithms. For instance, through extensive road testing, an autonomous driving system's perception system can adapt to different weather, terrain, and traffic conditions, gradually enhancing its ability to discern complex environments. Additionally, the data loop accelerates the iterative updating of algorithms, bringing the system closer to perfection with each feedback and optimization cycle.
Most crucially, the data loop design endows autonomous driving systems with adaptive capabilities. In practical applications, autonomous driving technology confronts various extreme and unpredictable scenarios such as emergency braking, collision avoidance, and driving in adverse weather conditions. The data loop mechanism enables the system to gradually refine its response strategies by continuously collecting and processing data from these anomalous situations. This dynamic adjustment capability allows autonomous vehicles to make swift decisions in unknown situations, minimizing the impact on drivers or passengers.
The data loop is not only a vital pathway for optimizing autonomous driving technology but also a cornerstone for ensuring system stability and safety. Through multiple data feedback loops and continuous optimization, autonomous driving systems progressively enhance their intelligence and reliability, addressing various complex real-world challenges and laying the groundwork for large-scale technology deployment.
Key Components of the Data Loop in Autonomous Driving
The realization of the data loop in autonomous driving hinges on the synergistic interaction of multiple technical components, collectively forming a comprehensive loop system that drives system optimization and evolution through data flow and feedback across each link.
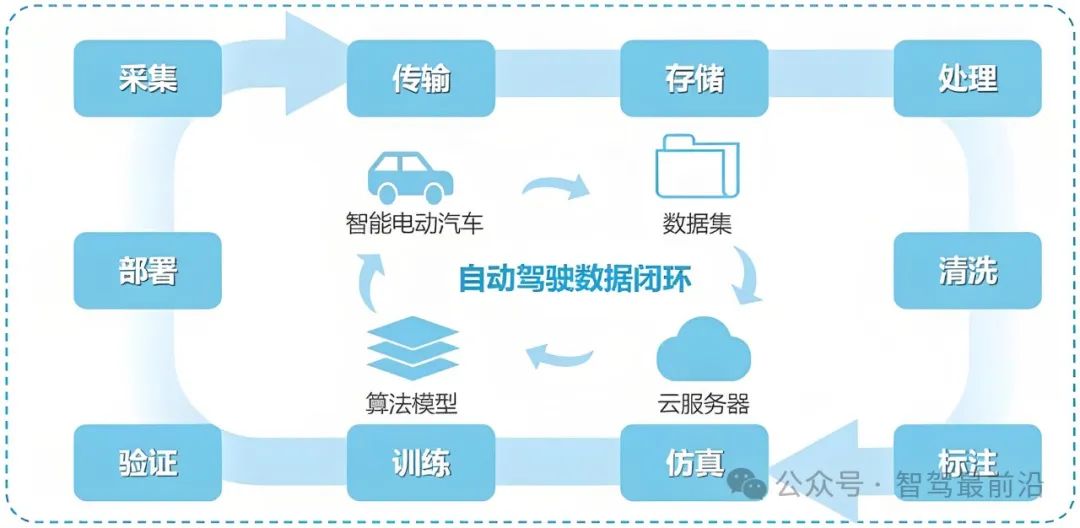
Schematic Diagram of the Autonomous Driving Data Loop
Data Collection
Data collection marks the inception of the data loop. In autonomous driving, vehicles rely on an array of sensors to capture real-time data about the surrounding environment. These sensors include LiDAR, millimeter-wave radars, cameras, ultrasonic sensors, GPS, etc., providing detailed information about objects around the vehicle, road conditions, traffic participants, and weather conditions. High-precision sensor data offers accurate information support for subsequent perception, decision-making, and control modules. With advancements in sensor technology, the accuracy and coverage of data collection have continually improved, laying the groundwork for the seamless operation of the data loop.
Data Transmission and Storage
Following data collection, transmission and storage become the next crucial steps. The autonomous driving system needs to transmit the vast amounts of collected data to a computing platform via a high-speed data transmission channel for real-time analysis and processing. Especially in complex scenarios, the data volume collected by sensors is substantial, necessitating robust data transmission bandwidth and low latency. The data storage system design must also efficiently handle massive data, supporting subsequent offline analysis, model training, and other processes. The integration of cloud computing and edge computing plays a pivotal role here, with the cloud processing extensive historical data while edge computing performs real-time data processing on the vehicle platform.
Data Annotation and Preprocessing
Data annotation and preprocessing are indispensable aspects of the data loop. The analysis of perception data by autonomous driving systems relies on extensive annotated data used to train algorithm models. During the data collection phase, raw sensor data often contains noise, missing, or erroneous information, necessitating preprocessing steps like denoising, deduplication, and supplementation to ensure data quality and reliability. The annotation process is often facilitated by AI-assisted tools, with deep learning algorithms automating parts of the annotation tasks, thereby enhancing efficiency and accuracy. High-quality annotated data provides a solid foundation for subsequent model training.
Data Processing and Algorithm Training
Data processing and algorithm training are the core elements of the data loop. After annotation and preprocessing, data enters the algorithm training phase. In autonomous driving, algorithm training typically employs advanced technologies such as deep learning, continuously refining perception, prediction, and planning models through extensive data input. The perception system enhances its ability to recognize road obstacles, pedestrians, and other vehicles through training. The decision-making system bolsters the real-time response capability of decision algorithms. The planning system improves the accuracy and robustness of path planning. As training data volume increases and algorithms are optimized, the intelligence level of autonomous driving systems continually rises, enhancing vehicle performance in complex road environments.
Implementation and Deployment
The optimized model is deployed to actual driving scenarios via the vehicle's computing platform. This process considers computing resources, hardware compatibility, and real-time requirements. The on-board computing platform typically comprises high-performance chips capable of processing real-time perception data and running intricate deep learning models. Model updates and iterations are also intertwined with data feedback. New data generated during real-world driving is fed back to the system in real-time, providing material for subsequent optimization and upgrades. This 'driving and learning simultaneously' mechanism enables the autonomous driving system to continuously self-optimize.
Feedback and Evaluation
Feedback and evaluation conclude the data loop. During autonomous driving system operation, every decision and behavior generates feedback information, which can be utilized to assess system performance through simulated environments, real-world road tests, and user feedback. By analyzing feedback data, the system identifies potential flaws and areas for improvement, guiding the next round of data collection and model training. This feedback loop enables the autonomous driving system to continuously enhance itself, bolstering driving safety, reliability, and comfort.
The various components of the data loop are interconnected, collectively constituting the core mechanism for optimizing the autonomous driving system. The effective operation of each link ensures the continual development and refinement of autonomous driving technology, thereby advancing and maturing the industry.
Core Role of the Data Loop in Autonomous Driving
The data loop plays a pivotal role in the autonomous driving system, serving as the primary driver for continuous technological progress and optimization. By collecting, processing, feeding back, and optimizing real-time data, the data loop not only elevates the intelligence level of autonomous driving systems but also plays a crucial role in enhancing safety, adaptability, efficiency, and other facets.
The data loop significantly boosts the perception capabilities of autonomous driving systems. In autonomous driving, the perception system's primary task is to acquire real-time detailed information about the surroundings and make accurate judgments. This process relies on extensive sensor data from cameras, radars, LiDAR, etc. Through the data loop mechanism, the perception system continually refines its understanding of the environment, thereby improving obstacle detection accuracy, pedestrian recognition, traffic sign recognition, and other aspects. During this process, perception data collected during actual driving enters the data processing system via the feedback loop, enhancing recognition algorithms and perception models, enabling the system to maintain efficient and stable performance in ever-changing road conditions and complex scenarios.
The data loop also enhances the decision-making and planning capabilities of autonomous driving systems. In real-world autonomous driving operations, the system must make real-time decisions based on perception data, directly influencing the vehicle's trajectory, speed, acceleration, and other behaviors. Through the data loop, the system continually optimizes decision-making algorithms based on historical data, real-world driving data, and user feedback. For instance, in complex urban environments, ensuring safety while making optimal path planning and handling sudden traffic situations and pedestrian behaviors rely on extensive real-time data feedback and continuous algorithm optimization. The data loop mechanism enables the autonomous driving system to make minor algorithm adjustments based on continuously collected data, thereby making more precise and flexible decisions in a dynamic traffic environment.
Furthermore, the data loop plays a vital role in improving system adaptability. The road conditions, traffic situations, weather changes, and other factors faced by autonomous driving systems are highly uncertain and complex. Traditional autonomous driving systems might excel in specific environments but encounter performance bottlenecks in new scenarios. Through continuous learning and feedback mechanisms, the data loop helps the system continually adapt to new situations and conditions. Through extensive data accumulation and feedback, the autonomous driving system gradually identifies and responds to various extreme weather conditions, peak traffic hours, or complex road situations, thereby bolstering the system's adaptability and robustness. In this process, real-time data generated during vehicle operation, particularly from extreme and rare scenarios, is crucial for enhancing the system's ability to adapt to unknown environments.
Furthermore, the data loop significantly enhances the safety of autonomous driving systems. Safety remains the paramount concern in the advancement of autonomous driving technology. By continuously monitoring system performance and environmental data, the data loop swiftly identifies potential safety hazards. Based on data feedback, the system assesses the risk of collisions with other road users and adjusts driving strategies in real-time to prevent accidents. The loop's feedback mechanism promptly addresses anomalies, making adjustments and optimizations through subsequent data analysis, thereby minimizing human intervention and boosting overall driving safety.
Through continuous optimization and feedback, the data loop enhances system efficiency and driving experience. In practical applications of autonomous driving, ensuring safety is crucial, but passenger comfort and system energy efficiency are also essential considerations. The data loop optimizes overall system efficiency by refining driving modes, path planning, and vehicle control strategies. For instance, during extended drives, it helps the system fine-tune driving strategies, reduce unnecessary acceleration or braking, lower energy consumption, and provide a smoother ride. Additionally, through user interaction and feedback, the data loop continually adapts the autonomous driving interface, enhancing the system's human-centric design and user experience.
Technical Challenges Faced by the Data Loop
The foundation of an effective data loop lies in data quality and accuracy. In autonomous driving systems, sensor data quality directly impacts subsequent processing and decision-making accuracy. Factors such as weather, road conditions, and lighting can affect sensor data, introducing noise, distortion, or incompleteness. Enhancing sensor reliability and accuracy, especially in complex and dynamic environments, is a significant challenge. Ensuring data accuracy during storage and processing is also vital for the data loop's effective operation.
The vast amount of data and real-time requirements pose significant challenges for computing and storage. Autonomous vehicles continuously gather extensive data from various sensors, which must be processed swiftly in real-time. Efficient data transmission and processing on edge computing platforms, balancing computing power and storage capacity, and ensuring real-time data transmission for analysis constitute major technical hurdles. In complex traffic scenarios, the system must respond with millisecond-level latency; any delay could compromise driving safety and accuracy.
The challenges of data annotation and model training cannot be overlooked. Annotated data is crucial for training autonomous driving models. However, the scale and accuracy of annotated data affect algorithm learning. In complex scenarios, manual annotation is time-consuming, resource-intensive, and may not cover all possible road and traffic conditions. Thus, improving data annotation automation through semi-supervised and transfer learning, and continuously optimizing training models with real driving data, are urgent issues.
Moreover, data privacy and security pose technical challenges. Autonomous vehicles collect extensive road and environmental data, some of which may contain user privacy or sensitive information. Ensuring data privacy and security during collection, storage, and transmission is crucial. Techniques like data de-identification, encryption, and secure transmission mechanisms are key to preventing data breaches and misuse. Additionally, safeguarding data integrity and preventing misuse during sharing and collaboration among different sources and vehicles is essential for the data loop's effectiveness.
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
Array
-
![]()
Internet Valuation Logic Shifts: From Scale Narrative to Profit Accountability
-
VOYAH Struggles to Find Its Niche in the Competitive Auto Market
-
![]()
Maxwell Technologies Gains Indirect Stake in Precision Optics via New Venture
-
![]()
Raising 1.8 Billion! This Domestic Optical Inspection 'Little Giant' is Going Public
-
China's AI 'Normandy Moment': The Explicit and Implicit Threads of BATL
-
![]()
Starting at 4999 Yuan! Nubia RedMagic Gaming Tablet 5 Pro Review: Impressive Performance, But Hefty Price Tag
-
![]()
ByteDance Initiates First Major Management Reform
-
![]()
AI is Quietly Destroying a Trillion-Dollar Industry