Autonomous Driving vs. Embodied Intelligent Perception: Design Priorities Explored
 03/02 2026
03/02 2026
 553
553
Autonomous driving and embodied intelligence are frequently discussed in tandem, with some even viewing autonomous driving as a subset of embodied intelligence within transportation contexts. Physically, autonomous vehicles can be likened to a "body with wheels," with the primary mission of safely navigating this body through complex road environments.
However, when we delve deeper into the design of their perception systems, notable differences come to the fore. Autonomous driving prioritizes an exceptionally high standard of safety certainty, demanding flawless environmental judgments at high speeds. Conversely, embodied intelligence emphasizes adaptive interaction, focusing on how agents engage deeply with the physical world through touch and manipulation. So, how do their perception systems differ in design priorities?
Long-Range Precision Detection vs. Near-Field Physical Interaction
The perception system in autonomous driving is fundamentally a detection network aimed at risk avoidance. Given the high speeds on highways, the primary perception requirements are "seeing far, seeing accurately, and seeing stably." With only a few hundred milliseconds available for decision-making during high-speed travel, the perception system must exhibit extreme certainty.
To achieve this, autonomous vehicles are outfitted with costly sensor arrays, including LiDAR, millimeter-wave radar, and multi-camera systems. These sensors fuse to create a redundant, omnidirectional model of the world. The design goal is to reduce every dynamic object in the environment to an entity with velocity vectors and probabilistic attributes.
Under this framework, perception serves obstacle avoidance. The system doesn't need to understand road pavement texture or the material of roadside fire hydrants; it only needs to detect obstacles ahead and predict their paths in the next few seconds.
This certainty requirement is particularly evident in perception range. Autonomous systems must identify potential threats hundreds of meters away, as braking distance increases exponentially with speed. Thus, perception accuracy must remain stable at long distances.
In contrast, autonomous driving perception objects are "non-contact." Autonomous vehicles should avoid physical interaction with any environmental obstacles. This "avoidance-based" technical requirement sets the system's priorities on accurately predicting external object trajectories and precisely positioning itself within the global coordinate system.
The system expends significant computational power to calculate the intentions of other vehicles and distinguish between roadside objects like utility poles and stationary pedestrians—all to find a certain and safe path without physical interaction.
On the other hand, the perception logic of embodied intelligence leans more towards "task-orientation" and "near-field refinement." A robot with embodied intelligence doesn't merely move; it physically interacts with objects in its environment.
In this scenario, using the perception logic of autonomous driving proves inadequate. When a robot wants to pick up a glass or turn a doorknob, it needs perception information not only about the object's location but also, more importantly, about its "affordances"—how the object can be manipulated.
The perception priorities of embodied intelligence systems lie in understanding the object's material, center of gravity, friction, and deformation under external forces. Thus, embodied intelligence relies more on the deep fusion of vision with touch and force sensing.
Vision provides rough guidance, while touch and force sensing offer critical feedback at the moment of contact. This closed-loop perception capability allows the agent to dynamically adjust its actions based on real-time feedback from the physical world, showcasing strong environmental adaptability.
These differing perception priorities lead to distinct technological paths. Autonomous driving strives to avoid environmental interaction at the perception level. Safety certainty means the system must vigorously suppress environmental uncertainties, using massive scenario data training to enable deterministic judgments in challenging conditions like heavy rain, backlighting, or sudden traffic changes.
Conversely, embodied intelligence views interaction as a learning source. The flexibility of limbs and the richness of interaction promote cognitive enhancement. From the embodied intelligence perspective, perception isn't about avoiding the world but intervening in it more confidently.
Safety Redundancy and Real-Time Constraints in Autonomous Driving's Deterministic Model
Autonomous driving's pursuit of "safety certainty" manifests as stringent reliability requirements in engineering. Since vehicles operate under open and highly constrained traffic rules, any perception bias can lead to irreversible consequences. This certainty demands not only extremely high accuracy in perception algorithms but also extremely low and predictable perception latency.
To ensure infallibility, autonomous systems employ multiple redundancy mechanisms in perception design. When cameras are blinded by intense light, LiDAR must precisely measure object distances through reflected waves. When millimeter-wave radar struggles to identify stationary objects, visual semantic segmentation technology must supplement the object's category information.
This complementarity among sensors with different principles essentially uses hardware certainty to counter environmental variability.
Processing perception data for autonomous driving involves extremely high data throughput. High-definition footage from multiple cameras and point clouds generating millions of points per second from LiDAR must undergo feature extraction and fusion within extremely short timeframes.
This real-time constraint is another facet of safety certainty. If perception results lag behind the real world by even a tenth of a second, all precise calculations become meaningless. To cope with this pressure, the perception architecture of autonomous driving is generally modular, with each sensor having a dedicated preprocessing module and final spatial-temporal alignment at the backend.
This structure ensures the system can quickly detect and isolate faults. If a radar reports an error, the system can immediately downgrade to relying solely on vision and remaining sensors, prompting human takeover or finding a safe location to stop.
Of course, an excessive pursuit of certainty also poses a challenge: the system becomes overly conservative. This is because the perception-decision link in autonomous driving is generally unidirectional or weakly feedback-based. Perception provides environmental snapshots, and decision-making acts based on these snapshots. Although prediction modules are introduced, this prediction is more based on probabilistic inferences from historical trajectories rather than actively probing environmental boundaries through interaction.
This design priority means autonomous driving performs efficiently in structured environments but has limited adaptability in extremely chaotic scenarios.
Safety certainty also requires autonomous perception systems to deeply understand road conditions. Vehicles are non-holonomic systems, with their motion constrained by tire friction. On rainy, snowy, or bumpy roads, the perception system must not only see the road but also "feel" its physical characteristics.
By analyzing wheel speed data, capturing suspension vibration frequencies, and even obtaining bump parameters from the cloud when other vehicles traverse the same road section, autonomous vehicles are attempting to construct a "road sense" that transcends vision.
Although this perception of environmental physical properties is more common in embodied intelligence, its core purpose in autonomous driving remains to enhance the certainty of motion control, preventing skidding or rolling during emergency maneuvers.
Perception-Action Closed Loop in Embodied Intelligence's Adaptive Interaction
Turning to embodied intelligence, its design core lies in handling "uncertainty" rather than eliminating it. Embodied agents generally operate in unstructured environments where preset rules and precise maps cease to exist. Agents must rely on a "perception-action closed loop" to correct deviations in real time.
Here, perception is no longer a static observation process but a dynamic interaction process. Embodied intelligence systems introduce the concept of "active visual perception," meaning robots don't passively wait for environmental information to enter sensors but actively adjust observation angles to see occluded parts of an object or gently touch to judge an object's stability.
Within the technological framework of embodied intelligence, action itself becomes part of perception. When a robot arm grasps an object, pressure sensors on the fingers generate high-frequency feedback signals. If the object begins to slide, this tactile feedback immediately triggers an increase in grip force through a low-level control loop, without waiting for a high-level visual model to complete complex semantic reasoning.
This ability to immediately correct based on physical feedback is the key to embodied intelligence's ability to handle complex dynamic scenarios. It possesses the capability to continuously "calibrate" its world model during execution, so it doesn't need a perfect, precise world model before acting.
Currently, embodied intelligence is shifting from traditional "recognition and planning" to "understanding and adaptation." Taking affordance perception as an example, when a robot faces a complexly shaped tool, it doesn't merely try to identify the tool's name through visual matching but uses model prediction to determine which areas of the tool are graspable and which positions remain stable under force.
This perception directly serves interaction, mapping visual features into action space. By introducing visual-language-action models (VLA), embodied agents can align high-level human instructions with specific low-level perception signals.
For instance, when hearing "hold the cup steadier," the system automatically increases the weight of tactile perception and monitors grip force changes in real time. This cross-modal adaptive capability enables embodied intelligence to demonstrate stronger generalization potential than autonomous driving when handling variable tasks.
To support this adaptability, embodied intelligence also has unique requirements for sensor configuration. Besides visual sensors, tactile arrays, six-axis force sensors, and full-body electronic skin become crucial. These sensors provide subtle information about object hardness, texture, temperature, and contact point slippage, which no remote sensor can replace.
Through this multidimensional perception, robots can continuously learn through "friction" with the environment. This learning process resembles how human infants establish spatial awareness through grasping—a highly body-feedback-dependent intellectual development process. In the framework of embodied intelligence, perception bias is not an error that must be eliminated but a signal that needs verification and correction through the next action.
Differences in Physical World Modeling Depth and Feedback Mechanisms
Autonomous driving and embodied intelligence also differ fundamentally in the depth of environmental modeling. Autonomous driving's environmental modeling is generally "two-and-a-half-dimensional," overlaying height information and a time axis onto a planar map. It focuses more on traffic flow continuity and topological relationships.
From the autonomous driving perspective, the world consists of lane lines, traffic lights, and moving point arrays forming a fluid. To ensure safety certainty, it tends to construct a "god's-eye view," controlling all uncertainties within understandable ranges through technologies like high-definition maps and perception fusion. Under this modeling, the priority of perception systems is semantic clarity and spatial localization robustness.
In contrast, embodied intelligence's environmental modeling is fully three-dimensional and physically attributed. It not only reconstructs object shapes but also understands object dynamics—these subtle physical attributes determine interaction success. Therefore, embodied intelligence is actively introducing the concept of "world models," using predicted physical feedback from actions to rehearse the future.
Differences in feedback mechanisms further widen the gap between the two. Autonomous driving feedback generally occurs over longer cycles, such as the decision layer replanning the path based on perceived ahead accidents.
In contrast, embodied intelligence feedback occurs across multiple timescales: microsecond-level force feedback ensures contact stability, millisecond-level visual servoing ensures action precision, and second-level task planning ensures goal achievement. This multi-level, high-frequency feedback loop is the cornerstone of embodied intelligence's "interactive adaptability."
Although autonomous driving pursues certainty and embodied intelligence pursues adaptability, both ultimately aim to achieve reliable autonomy in the physical world.
As artificial intelligence technology continues to evolve, we see autonomous vehicles becoming increasingly "intelligent," learning to probe other vehicles' yielding intentions through slight lane-change attempts. We also see embodied robots becoming increasingly "robust," incorporating automotive-industry-level safety redundancy during task execution.
This technological convergence heralds the arrival of a new phase, where perception systems are no longer merely organs for passively receiving signals but bridges connecting digital souls to physical entities. In this process, certainty provides the baseline, while adaptability opens up infinite possibilities.
Final Thoughts
For autonomous driving, the perception priority centers on 'obstacle avoidance and compliance.' It perceives the world as a realm governed by rules, necessitating precise measurements and cautious navigation. Conversely, embodied intelligence prioritizes 'operation and evolution,' viewing the world as an interactive space that can be sensed, transformed, and from which wisdom can be derived through bodily experiences.
In future intelligent systems, these two logics will cease to be mutually exclusive. Instead, they will collaborate harmoniously, much like the human brain and cerebellum, jointly underpinning truly versatile intelligent entities. Observing the evolution of perception design, it becomes evident that the true advancement in intelligence does not stem from processing massive datasets. Rather, it lies in converting fragmented perceptions into practical capabilities within the real world.
-- END --
-
![]()
Smartphone Prices Surge Amid Manufacturer Anxiety
-
![]()
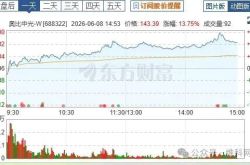
Orbbec Soars to Record Heights, Eyes Further Capital Influx of 980 Million!
-
![]()
Tongding Interconnect Sets Up Shop in Shaoguan with 800 Million Yuan in Registered Capital
-
![]()
Before Kimi’s A-Share Debut, Zhipu Aims to Secure More 'Strategic Funding'
-
![]()
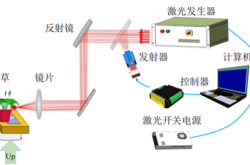
Innovative Leap | Fiber-Pluggable 1470nm Laser Source: Revolutionizing Precision Laser Weeding
-
![]()
73-Day Rapid Listing: Where Does Unitree's Wang Xingxing's 'Sense of Urgency' Come From?
-
![]()
AI Project Mindverse, Backed by Meituan, Faces Data Inflation Allegations Over Its Macaron Product
-
![]()
3000-word In-Depth Analysis | What Makes Physical AI So Magnetic? It Has Captivated Masayoshi Son, Jensen Huang, and Justin Sun All at Once