What is embodied intelligence? Is autonomous driving embodied intelligence?
 12/10 2024
12/10 2024
 664
664
With the rapid development of technology, more and more new concepts, terms, and expressions are being introduced. Recently, the concept of "embodied intelligence" has gained significant popularity in the field, with some even comparing autonomous driving to a practical application of embodied intelligence. As key technologies in the field of artificial intelligence, what is the relationship between autonomous driving and embodied intelligence? Can autonomous driving be classified as embodied intelligence? With these questions in mind, Zhijia Zuiqianyan conducted a brief investigation into embodied intelligence and will now share some preliminary thoughts. We welcome your comments and discussions.
As one of the core applications of artificial intelligence technology, autonomous driving has garnered significant attention in technology, industry, and society in recent years. Meanwhile, embodied intelligence, as an important concept in cognitive science and artificial intelligence, posits that intelligence is not solely dependent on computational ability but also requires the interaction between the body and the environment. This theory provides a new perspective on understanding intelligence.

The connotation of embodied intelligenceEmbodied intelligence is a theory in cognitive science and artificial intelligence that emphasizes that intelligence is not solely located in the brain or central processing unit but is achieved through the physical form of the body and dynamic interaction with the environment. This concept opposes the traditional assumption that artificial intelligence relies excessively on symbolic reasoning and purely computational models, arguing that intelligence is shaped by both the body and the environment. In fact, embodied intelligence is not a new concept. As early as the 1950s, Alan Turing first mentioned this concept in his paper "Computing Machinery and Intelligence".
1.1 Basic connotation of embodied intelligence
The core idea of embodied intelligence is that the body (embodiment) is not only a tool for executing intelligence but also a part of intelligence itself. Intelligent agents (whether biological or mechanical) interact with the external environment through the body's perceptions and actions, dynamically adapting to and influencing the environment. Intelligence is not an internal process independent of the environment but exists in the interaction between the intelligent agent and the external world.
For example, when humans learn a skill (such as riding a bicycle), physical coordination, muscle memory, and perception of gravity collectively contribute to this skill. The skill is not solely accomplished through brain computation but relies on an overall intelligence formed by the body through practice.

1.2 Main ideas of embodied intelligence
1. Intelligence relies on body morphology
Embodied intelligence emphasizes that the expression of intelligence is closely related to the body structure of the intelligent agent. Different body morphologies lead to different intelligent manifestations. For example, humans have flexible hands, making us adept at precise operations, while dolphins' streamlined bodies and sonar systems allow them to navigate efficiently in water. The body is not an auxiliary tool for intelligence but the foundation of intelligence.
In robotics, this concept is known as "morphological computation." Morphological computation refers to the idea that the body structure of an intelligent agent itself can undertake some computational tasks, thereby simplifying the intelligent decision-making process. For example, when a quadruped robot moves in complex terrain, it does not need to rely solely on the central processing unit to calculate every movement of its feet; the elasticity of its joints and body morphology naturally adapt to the terrain.
2. Embodied intelligence arises from dynamic interaction
Embodied intelligence posits that the behavior of intelligent agents arises from their real-time interaction with the environment rather than being solely driven by internal programs. This interaction is bidirectional: the intelligent agent acquires environmental information through perception and changes the environment through action. For example, when a cheetah chases prey, it needs to perceive the location and speed of the prey through vision while simultaneously adjusting its body posture and running trajectory. This dynamic adjustment not only demonstrates the flexibility of the body but also reflects the synergistic effect between perception and action.

Unlike the traditional "input-process-output" model of artificial intelligence, embodied intelligence emphasizes the closed-loop relationship between perception and action. In this closed loop, perception and action influence each other; action creates new conditions for perception, while perception guides further action.
3. The environment shapes embodied intelligence
The environment plays a crucial role in embodied intelligence. The behavior and abilities of intelligent agents must be compatible with their environment. For example, frogs can quickly capture moving insects through vision in wetland environments, but this visual ability may lose its advantage in desert environments. This shows that embodied intelligence is not a fixed trait but a dynamic characteristic closely related to the environment. In artificial systems, this concept is embodied in the design of "embedded intelligence." Embedded intelligence refers to the design where the behavior of an intelligent agent should be coordinated with the physical characteristics of the environment. For example, when designing a cleaning robot, one must consider the layout of the room, the placement of furniture, and the material of the floor. This design allows the robot to efficiently complete cleaning tasks without relying on complex algorithms to calculate every movement.
1.3 Comparison between embodied intelligence and traditional intelligence
The introduction of embodied intelligence is an important supplement and expansion to traditional artificial intelligence (especially symbolic artificial intelligence). Traditional artificial intelligence emphasizes simulating human thinking through logical reasoning and knowledge representation, whereas embodied intelligence argues that this simulation ignores the role of the body and the environment and thus cannot fully explain the essence of intelligence.
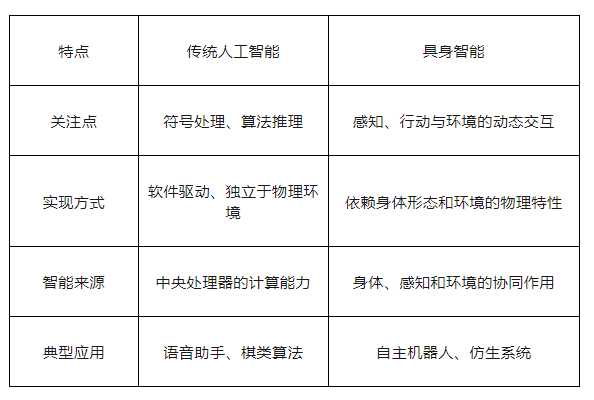
A typical comparative case is chess algorithms and biorobots. Chess algorithms (such as AlphaZero) rely on complex search and reasoning computations but cannot perceive or adapt to the real world. In contrast, biorobots (such as Boston Dynamics' Spot) interact with the environment through their body morphology, demonstrating dynamic adjustment capabilities in complex terrain.
1.4 Synergy between perception and action: Key feature of embodied intelligence
The synergistic relationship between perception and action is a key feature of embodied intelligence and distinguishes it from traditional intelligent systems. In embodied intelligence, perception and action are not independent modules but interdependent and mutually reinforcing closed loops.

• A quadruped walking in a complex environment needs to adjust its gait in real-time based on the perceived slope, friction, and obstacle locations of the ground. This adjustment is not precomputed but dynamically achieved through the closed-loop interaction between perception and action.
• In industrial robots, welding tasks require adjusting the movement path of the welding arm based on real-time sensor data (such as the position and heat distribution of the welding point). This perception-action closed loop allows the robot to adapt to subtle changes in the production line, improving efficiency and quality.
Embodied intelligence emphasizes that intelligence is the result of the synergistic action of the body, perception, and environment rather than abstract computation isolated from the body and environment. It fundamentally changes our understanding of intelligence and provides a new theoretical framework for the study of biological behavior and the design of artificial intelligence systems. In the future, the concept of embodied intelligence will continue to drive the development of robotics, cognitive science, and artificial intelligence, providing important support for realizing more efficient and intelligent autonomous systems.

The essence of autonomous driving: Intelligent transportation tool
2.1 Core principles of autonomous driving
Autonomous driving refers to a technological system where vehicles perceive the environment, analyze data, plan routes, and control vehicle behavior to achieve autonomous driving. Its essence is still an intelligent transportation tool.

(1) Perception system: Obtain environmental information through sensors such as cameras, lidars, and ultrasonic radars, including roads, vehicles, pedestrians, and traffic signs.
(2) Decision system: Based on perception data, use artificial intelligence algorithms to plan the vehicle's driving path and determine action strategies.
(3) Control system: Execute the commands of the decision system and control the vehicle's actual behavior through braking, steering, acceleration, etc.
2.2 Dynamic characteristics of autonomous driving
During driving, the autonomous driving system needs to perceive changes in the surrounding environment in real-time and adjust behavior accordingly. This characteristic endows it with dynamic interaction capabilities, such as planning detour routes during traffic jams or taking evasive measures in emergencies.
2.3 Physical "body" of autonomous driving
The "body" of an autonomous vehicle includes sensors, computing platforms, actuators, etc., which work together to complete environmental perception, data processing, and action implementation. The existence of this "body" makes autonomous vehicles not just an algorithmic system but an intelligent agent embedded in the environment.

Comparison between autonomous driving and embodied intelligence?
1. Combination of body and perception
Embodied intelligence advocates that intelligent agents achieve intelligent behavior through the interaction between the body's sensory organs and the environment.
• Autonomous driving performance: Autonomous vehicles obtain environmental information through sensors such as cameras, lidars, and millimeter-wave radars, which serve as their "eyes" and "ears".
• Evaluation: The intelligent behavior of autonomous vehicles highly depends on real-time data provided by sensors, and the combination of perception and decision-making conforms to this characteristic of embodied intelligence.
2. Dynamic interactivity
Embodied intelligence emphasizes that intelligent agents adjust their behavior through real-time environmental feedback.
• Autonomous driving performance: The autonomous driving system analyzes environmental data in real-time and adjusts the vehicle's speed, direction, etc., based on changes. For example, when an obstacle suddenly appears, the vehicle will take emergency braking or evasive action.
• Evaluation: This dynamic interactivity is a typical manifestation of embodied intelligence, and the autonomous driving system fully complies with this point.
3. Environmental embedding
Embodied intelligence requires the behavior of intelligent agents to be embedded in the environment and interact with the outside world.
• Autonomous driving performance: The behavior of autonomous vehicles is entirely dependent on their traffic environment, such as traffic light signals and road condition changes. It not only needs to adapt to the environment but also interact with other road users (such as pedestrians and other vehicles).
• Evaluation: Autonomous driving exhibits obvious environmental embedding, meeting this requirement of embodied intelligence.
4. Synergy between action and cognition
Embodied intelligence emphasizes that bodily actions are one manifestation of intelligence.
• Autonomous driving performance: The vehicle executes the output of the decision algorithm through braking, steering, acceleration, and other actions to achieve driving behavior. These actions are the external manifestations of intelligent behavior.
• Evaluation: Autonomous driving strongly demonstrates synergy between action and cognition, but its "actions" essentially rely on mechanical actuators, differing from natural biological movements.

Differences between autonomous driving and embodied intelligence
4.1 Naturalness and limitations of the body
Embodied intelligence typically uses organisms as prototypes, while the body of autonomous vehicles (sensors and mechanical structures) is artificial, fundamentally different from biological bodies in form. For example, the lidar of a vehicle differs significantly from human visual perception.
4.2 Lack of subjective intelligence
Embodied intelligence emphasizes the autonomy and adaptability of intelligent agents formed in the environment, whereas autonomous driving currently relies more on artificially designed algorithms and rules. Its autonomous learning and adaptation abilities are still limited. Although the concept of end-to-end has emerged, granting autonomous driving autonomy, no automotive company has yet commercialized this technology.
4.3 Depth of environmental interaction
Biological embodied intelligent agents evolve complex behavioral patterns through long-term interaction with the environment, while the behavior of autonomous vehicles is still primarily driven by rules and data, not yet reaching the complexity of biological intelligence.

Is autonomous driving embodied intelligence?
Based on the above analysis, autonomous driving embodies the core concepts of embodied intelligence in many ways: it perceives the environment through sensors, adjusts behavior based on real-time feedback, and dynamically interacts with the external environment in traffic scenarios. Autonomous driving can be considered a form of engineered embodied intelligence.
However, compared to biological intelligence in embodied intelligence theory, the intelligence of autonomous driving still has certain limitations in autonomy, adaptability, and interaction depth. Therefore, autonomous driving is more like an artificial intelligence application inspired by embodied intelligence rather than a fully embodied intelligent agent. In the future, with technological advancements and algorithm evolution, autonomous driving systems may further approach the concept of embodied intelligence, realizing more natural and autonomous intelligent behavior and bringing greater changes to human travel.
-- END --
-
![]()
Qwen’s Meteoric Rise: A Strategic Triumph for Alibaba in Recent Years
-
![]()
Swallowing the Last Independent Player, Meituan Aims for More Than Just Fresh Groceries
-
![]()
Annual Report | China's Soundbar Market Sees 17% Sales Decline in 2025; Domestic TV Brands Rise; KTV and Products Priced Above 8,000 Yuan Buck the Trend
-
![]()
iPhone 17e Set for February 19 Launch: Dynamic Island Featured, But High Refresh Rate and Dual Cameras Still Missing
-
![]()
Apple Joins the 'File Transfer Alliance'? Android to Seamlessly Integrate with AirDrop, Enabling Effortless 'Airdrop' Functionality Without Additional Apps
-
![]()
Who's Reaping the Profits in the Auto Industry?
-
![]()
Why Does Vivo, Ranked Top, Still Pursue an Alliance with ByteDance?
-
![]()
The Finale of the AI Race: Does Electricity Hold the Key?