Accelerating Robotaxi Realization through Vehicle-Road-Cloud Collaboration
 01/13 2025
01/13 2025
 717
717
With the deep integration of artificial intelligence, big data, and the Internet of Vehicles (IoV) technologies, intelligent driving technology is entering a pivotal stage of rapid development. Robotaxi, as a quintessential application scenario for high-level autonomous driving, facilitates the transition from pilot projects to commercialization through its innovative vehicle-road-cloud collaboration approach.

Introduction
Intelligent driving stands as the core direction for future transportation development, transforming not only traditional automobile manufacturing and usage models but also urban traffic management, shifting from manual operation to intelligent collaboration. Robotaxi, with its pivotal role in technological implementation and commercialization exploration, has emerged as a key deployment scenario for high-level autonomous driving. Its centralized operation mode and pilot practices in specific areas not only mitigate the risks associated with imperfect technology and regulations but also provide invaluable data support for the accumulation and optimization of advanced autonomous driving technology.
However, the widespread promotion of Robotaxi faces multifaceted challenges. Technologically, high-level autonomous driving demands rigorous standards in perception, computation, and decision-making. Industrially, high hardware costs and an incomplete ecosystem pose obstacles. Policy-wise, the formulation of regulations and standards requires time. Thus, fostering the large-scale development of Robotaxi through policy support, technological breakthroughs, and business model innovation has become a critical issue in the intelligent driving field.

Industrial Development Stages and Trends of Intelligent Driving
2.1 V2X Vehicle-Road-Cloud Collaboration Policy as the First Driving Force
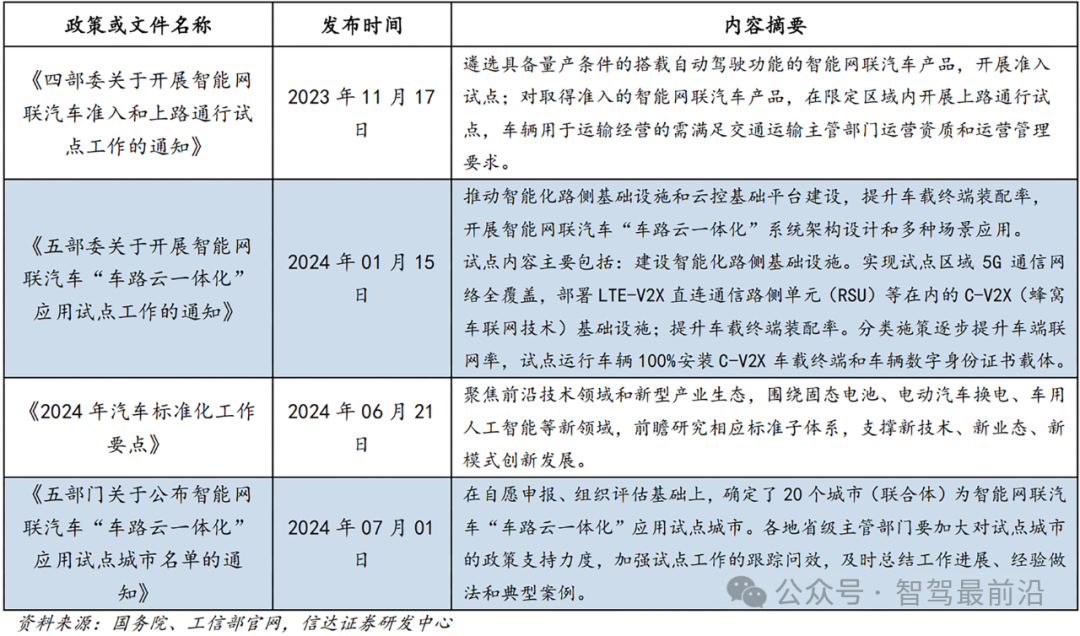
Policy serves as a significant driving force for the intelligent driving industry. Over recent years, the Chinese government has formulated a series of supportive policies in the field of intelligent and connected vehicles, spanning pilot demonstrations, standard specifications, and technological research and development, thereby fostering a conducive industry environment. The "Notice on Pilot Work for the Access and Road Travel of Intelligent and Connected Vehicles" issued in 2023 clearly stipulates that intelligent and connected vehicle products equipped with autonomous driving functions that meet mass production criteria should be selected for access pilot projects. For products that have gained access, pilot road travel projects should be carried out within designated areas, and vehicles used for transportation operations must adhere to the operational qualifications and management requirements set by the competent transportation authorities.
Recent National Policies on Intelligent Driving and the Internet of Vehicles
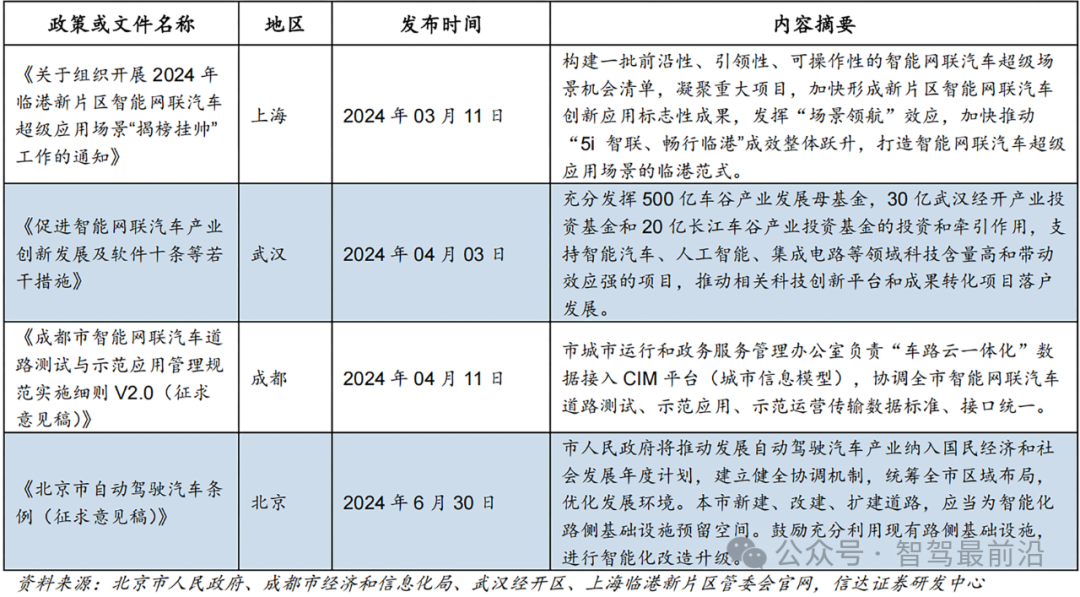
Recent Regional Policies on Intelligent Driving and the Internet of Vehicles
Vehicle-road-cloud collaboration, as a vital pathway to propel the large-scale application of intelligent driving, has garnered substantial policy attention. The "List of Pilot Cities for the Integrated Application of Intelligent and Connected Vehicles" exemplifies this, accelerating the deployment of vehicle-road collaboration technology in 20 pilot cities nationwide, encompassing comprehensive coverage of intelligent roadside equipment, 5G communication networks, and edge computing platforms. Policy-driven, intelligent driving has taken a significant step from technology experimentation to commercial application, particularly in Robotaxi pilots, enabling the accumulation of valuable experience in high-frequency usage scenarios, gradually forming a virtuous cycle encompassing technology, regulation, and business.
2.2 Iteration and Bottleneck Breakthroughs of High-Level Intelligent Driving Technology
The realization of high-level autonomous driving (L3 and above) marks a significant technological milestone in the intelligent driving industry. L3 technology allows vehicles to achieve fully autonomous driving under specific conditions, necessitating manual takeover only in scenarios where the system cannot cope. This leap requires a qualitative advancement in the core links of perception, decision-making, and execution.
Previously, inadequate onboard computing power, limited algorithm optimization, and insufficient data collection hindered the development of high-level intelligent driving technology. However, recent advancements in cutting-edge algorithms such as BEV (vision-based environment representation) and Transformer, coupled with the widespread application of high-performance onboard chips like NVIDIA Orin, have made breakthroughs in L3 technology possible. Technology companies like Baidu Apollo and Pony.ai have demonstrated L4-level technical capabilities in Robotaxi pilots and transferred some technologies to mass-produced models.
Another crucial technological breakthrough lies in the massive accumulation of data. The performance optimization of autonomous driving systems heavily relies on extensive real-world scenario data, necessitating not only efficient data collection from individual vehicles but also global perception through vehicle-road collaboration. Robotaxi pilot operations enable technology companies to gather data from various complex road conditions, laying a solid foundation for future large-scale promotion.

Technical Path and Commercialization Analysis of Robotaxi
3.1 Advantages and Evolutionary Direction of Strong Visual Technology
Compared to LiDAR solutions, strong visual technology, with cameras as the core sensing solution, has gradually emerged as a crucial direction for autonomous driving perception systems due to its cost-effectiveness and ease of mass production. Leveraging efficient deep learning algorithms, strong visual technology can recognize various information, including lane lines, traffic signs, and dynamic targets, thereby supporting the vehicle's path planning and decision-making.
Baidu's Apollo Lite solution achieves precise perception and real-time decision-making for complex urban roads through the collaborative perception of multiple cameras and an efficient computing platform. Compared to traditional LiDAR solutions, Apollo Lite not only significantly reduces hardware costs but also achieves more efficient resource allocation in terms of algorithm optimization and computing power requirements.
Nevertheless, strong visual technology still exhibits certain performance limitations under low-light or extreme weather conditions. Future technological advancements may trend towards multi-sensor fusion, constructing a multi-dimensional perception system by integrating LiDAR, millimeter-wave radar, and cameras, thereby further enhancing the system's reliability and adaptability.
3.2 Analysis of Robotaxi's Business Model and Profit Potential
Robotaxi's commercial success hinges on a reasonable operation model and a continuously optimized cost structure. Currently, there are primarily three Robotaxi operation models in the industry:
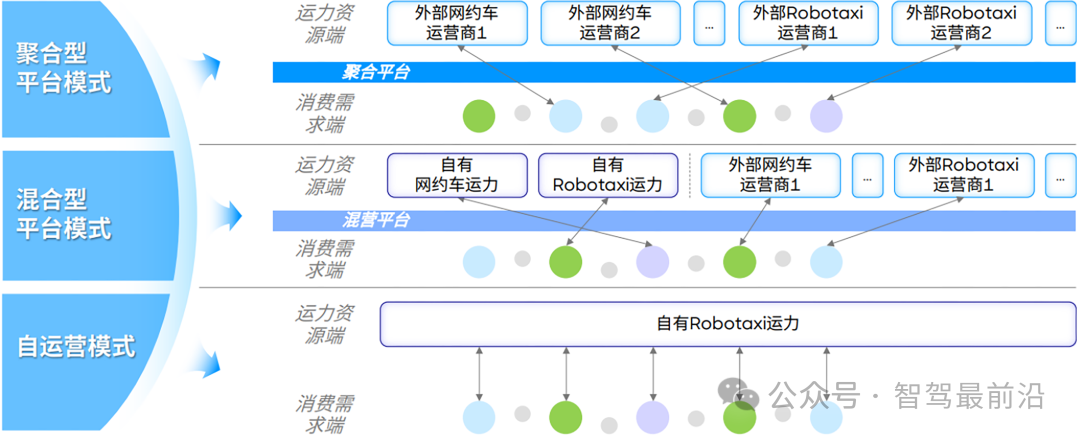
Three Operation Models of Robotaxi
1. Aggregated Platform Model: Integrates vehicle resources from multiple parties, with the demand side as the entry point, to achieve unified dispatch and service.
2. Hybrid Operation Model: The platform owns both self-operated vehicles and accesses external transport resources to enhance vehicle utilization.
3. Fully Self-Operated Model: The platform fully controls vehicles and operation services, achieving service standardization through centralized management.
Taking Baidu's "Yichi 06" as an example, it adopts a highly redundant configuration in design aspects such as architecture, computation, steering, braking, communication, power supply, and sensors, ensuring operational safety and reliability. Simultaneously, large-scale mass production effectively reduces the cost per vehicle. Calculations indicate that with the gradual maturation of the business model, the unit operating cost of Robotaxi is expected to be lower than that of traditional taxis and online ride-hailing services.
The profit model of Robotaxi also exhibits a trend towards diversification. Besides traditional passenger transport revenue, operators can diversify revenue through advertising, value-added services (such as in-car entertainment), and data licensing. This compound profit model not only offers operators greater development space but also provides new avenues for the commercialization of the entire industry.

Development and Technological Ecosystem of Vehicle-Road-Cloud Collaboration
4.1 Technological Supplement of Vehicle-Road Collaboration to Single-Vehicle Intelligence
Single-vehicle intelligence, the starting point of intelligent driving, relies on onboard cameras, LiDAR, millimeter-wave radars, and other sensing devices to achieve autonomous driving functions through independent computation. However, in actual traffic scenarios, single-vehicle intelligence faces issues such as limited perception range, computing power bottlenecks, and insufficient collaboration efficiency, particularly in complex urban road environments like sudden pedestrian appearances in blind spots or perception errors due to inclement weather, where single-vehicle intelligence struggles to respond quickly and accurately to emergencies.
To address these challenges, vehicle-road collaboration (V2X) emerged. V2X enables real-time communication between vehicles (V2V), vehicles and infrastructure (V2I), and vehicles and the cloud (V2C), facilitating rapid information sharing and dynamic feedback, thereby providing global perception and decision-making support for single-vehicle intelligence. In intersection scenarios, roadside equipment units can transmit real-time information on traffic flow, signal light status, and pedestrian activities to approaching vehicles, aiding them in formulating passage strategies in advance, thus reducing the frequency of vehicle braking and stopping and enhancing traffic efficiency.
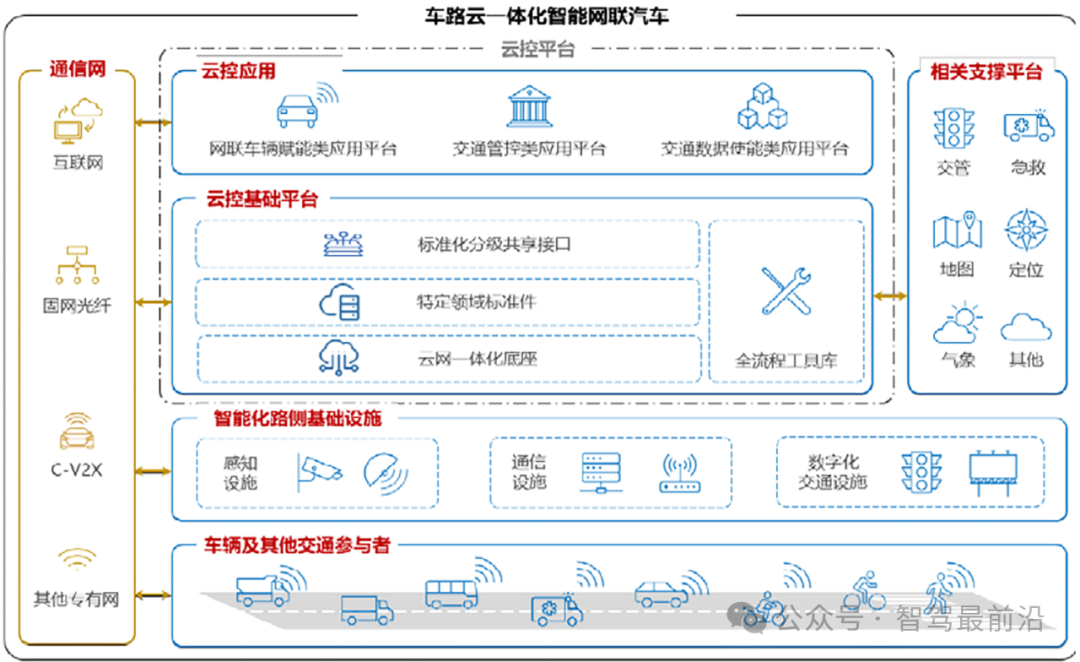
Illustration of Integrated Vehicle-Road-Cloud Intelligent and Connected Vehicles
Vehicle-road collaboration can also effectively compensate for the limitations of single-vehicle perception. On road segments with a high incidence of traffic accidents, roadside communication units can send accident information to following vehicles in advance, alerting drivers and autonomous driving systems to adjust speed and travel routes, thereby reducing the risk of secondary accidents. This information interaction capability based on beyond-visual-range perception markedly enhances the safety and stability of intelligent driving systems.
Practically, the introduction of vehicle-road collaboration significantly optimizes traffic management efficiency. In urban traffic, traditional signal light control operates solely based on preset rules, whereas vehicle-road collaboration technology can achieve more precise signal light optimization by dynamically analyzing real-time traffic data, significantly reducing the likelihood of congestion. With the continuous advancement of V2X technology, vehicle-road collaboration will become the core technical support for high-level autonomous driving, providing crucial guarantees for the promotion of intelligent driving application scenarios such as Robotaxi.
4.2 Construction and Market Prospects of V2X Infrastructure
The widespread application of vehicle-road collaboration technology relies on the comprehensive deployment and continuous optimization of V2X infrastructure. V2X technology establishes an information communication network between vehicles and the external world, connecting the vehicle side, roadside, and cloud side to construct a highly integrated intelligent transportation system. Currently, China has achieved remarkable progress in V2X infrastructure construction, creating favorable conditions for the commercial application of intelligent driving.
As of the end of 2023, data from the China Academy of Information and Communications Technology reveals that a total of 8,500 roadside communication units have been established nationwide, covering major traffic sections in multiple pilot cities. Additionally, the rapid development of 5G communication networks provides a low-latency, high-bandwidth communication environment for V2X technology. For instance, in the Beijing-Shanghai Expressway (G2) project, 710 kilometers of network connectivity upgrades have been completed, making it China's first "Internet of Vehicles 1st Expressway".
Beyond the expansion of hardware facilities, the V2X software and hardware technology ecosystem is also rapidly improving. The upgrade of roadside equipment units not only enhances the accuracy of data collection and transmission but also achieves efficient processing of traffic flow trajectories and dynamic traffic events. Edge computing nodes offload most real-time computing tasks to the local level, thereby reducing the load on cloud computing and further shortening data processing latency.
With the increasing adoption of V2X infrastructure in the future, its market potential will continue to expand significantly. Research anticipates that by 2026, the pre-installation rate of C-V2X equipment in passenger vehicles in China will surpass 9%, while the deployment of roadside equipment will scale up further. This synchronized growth of upstream and downstream industry chains will propel the expansion of markets in communication modules, chips, sensors, and cloud control platforms, ultimately fostering a comprehensive intelligent transportation ecosystem.
In the longer term, the extensive deployment of V2X infrastructure is pivotal not only for facilitating the widespread implementation of Robotaxi but also for supporting a broader spectrum of intelligent and connected applications, such as unmanned delivery vehicles, smart logistics, and advanced traffic management systems.

Hardware Requirements and Industrial Chain Upgrades for Robotaxi
5.1 Analysis of LiDAR and Multi-Sensor Fusion Technology
LiDAR, a crucial sensor in high-level autonomous driving systems, offers exceptional perception capabilities to Robotaxi through its precise distance measurement and 3D environmental modeling. Unlike cameras and millimeter-wave radars, LiDAR performs more reliably in adverse weather and varying lighting conditions, especially at night or during rainy and snowy weather, where it continues to provide stable perception data, thus compensating for the limitations of visual sensors.
For instance, the sixth-generation Baidu Apollo Robotaxi is equipped with four ultra-high-definition long-range LiDAR AT128 and multiple short-range LiDAR units, enabling comprehensive 360° environmental perception. With a detection range of up to 200 meters, these LiDARs support precise positioning and obstacle avoidance in complex urban traffic environments.
(Note: The repeated "Array" lines appear to be placeholders or formatting errors and have been omitted from the optimized text.)
-
![]()
Hardware is the skeleton, AI is the soul, and data integrates the two
-
![]()
China’s AI Industry: A Unified Pivot Towards Monetization?
-
![]()
New Progress! Infineon Completes Acquisition of ams OSRAM's Non-Optical Sensor Business
-
![]()
35 Million Bet on an Optical Future! Tengjing Technology Makes a Move in AR
-
![]()
Why World Models Get Stuck on Construction Roads in Autonomous Driving Applications
-
Alibaba Initiates Cultural Transformation: Is Jack Ma Making a Strategic Comeback?
-
Tianfeng Heads to Hong Kong for IPO with RMB 3.8 Billion in Funds: Xingyu's Cross-Border Foray into Embodied AI Faces Uncertain Future
-
![]()
Mengshi Auto’s High-End Aspirations Dashed: Huawei Partnership Fails to Revive Sales, New Model’s Entry Price Dips Below 300,000 Yuan