Revolutionizing Industrial Robot Controller Design: Navigating Challenges, Innovating Solutions, and Embracing Trends
 04/08 2025
04/08 2025
 642
642
Produced by Zhinengzhixin
The design of industrial robots and controllers stands as a cornerstone in industrial automation, deeply influenced by system complexity, communication efficiency, cost management, and sustainability demands. As a pioneering enterprise in chip design, we delve into the pivotal challenges and emerging trends shaping current industrial system design.
From the vantage points of functional integration, communication optimization, and Time-Sensitive Networking (TSN) application, we elucidate strategies to streamline design processes, elevate system performance, and cater to the demands of future smart factories. Balancing high performance and reliability with reduced complexity and cost, while fostering green and sustainable development, represents the vital directives for industrial design.
Part 1: Design Challenges and Solutions
The design of industrial robots and controllers confronts numerous technical hurdles arising from the intricacies of system architecture, the variety of communication standards, and practical constraints in hardware development. This section dissects these challenges and presents practical solutions grounded in real-world application scenarios.
Modern industrial systems often rely on an amalgamation of chip components, such as Microprocessors (MPUs), Microcontrollers (MCUs), and Field-Programmable Gate Arrays (FPGAs), to fulfill the requirements of high-performance computing and real-time control.
However, this multi-chip architecture notably elevates design complexity. Each component necessitates independent development, testing, and integration processes, leading to prolonged development cycles.
Furthermore, multi-chip systems encounter additional challenges in circuit board layout, power consumption management, and thermal design, potentially compromising the overall system's reliability. For instance, a typical industrial robot might necessitate separate chips for motion control, data processing, and communication tasks, complicating hardware design and increasing the risk of errors.
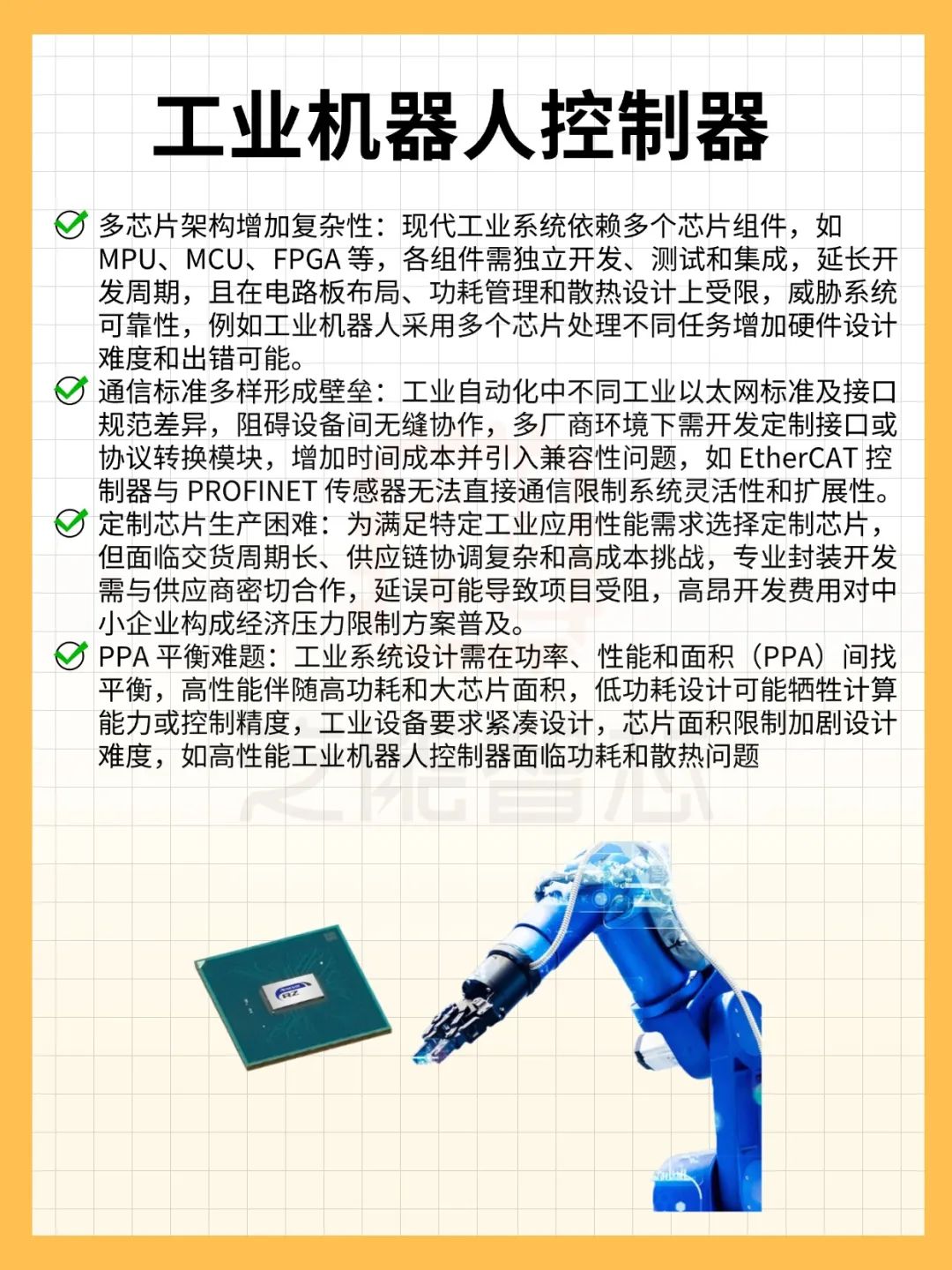
Industrial automation hinges on efficient communication between devices, yet disparities in various industrial Ethernet standards (such as EtherCAT, PROFINET, and EtherNet/IP) and interface specifications impede seamless collaboration between components.
In a multi-vendor environment, devices may adopt disparate communication protocols, necessitating engineers to develop customized interfaces or protocol conversion modules.
This extra development work not only incurs additional time costs but may also introduce potential compatibility issues. For example, a controller supporting EtherCAT might not directly communicate with sensors utilizing PROFINET, thereby limiting system flexibility and scalability due to these communication barriers.
To meet the performance benchmarks of specific industrial applications, custom chips have emerged as a preferred choice for many systems. However, the production of custom chips confronts challenges such as extended lead times, intricate supply chain coordination, and substantial costs.
The development of specialized packaging necessitates close collaboration with suppliers, and any delays in this process can impede project progress. The high development costs of custom chips impose significant economic pressures on small and medium-sized enterprises, thereby limiting the widespread adoption of this solution.
Industrial system design necessitates finding an optimal equilibrium between power, performance, and area (PPA). High performance often correlates with high power consumption and larger chip areas, whereas low-power designs might compromise computing power or control accuracy.
High-performance industrial robot controllers might require robust processing capabilities to achieve multi-axis synchronous control, but the resultant increase in power consumption escalates operational costs and cooling requirements. Industrial devices typically necessitate compact designs, and the constraint on chip area further exacerbates design challenges.
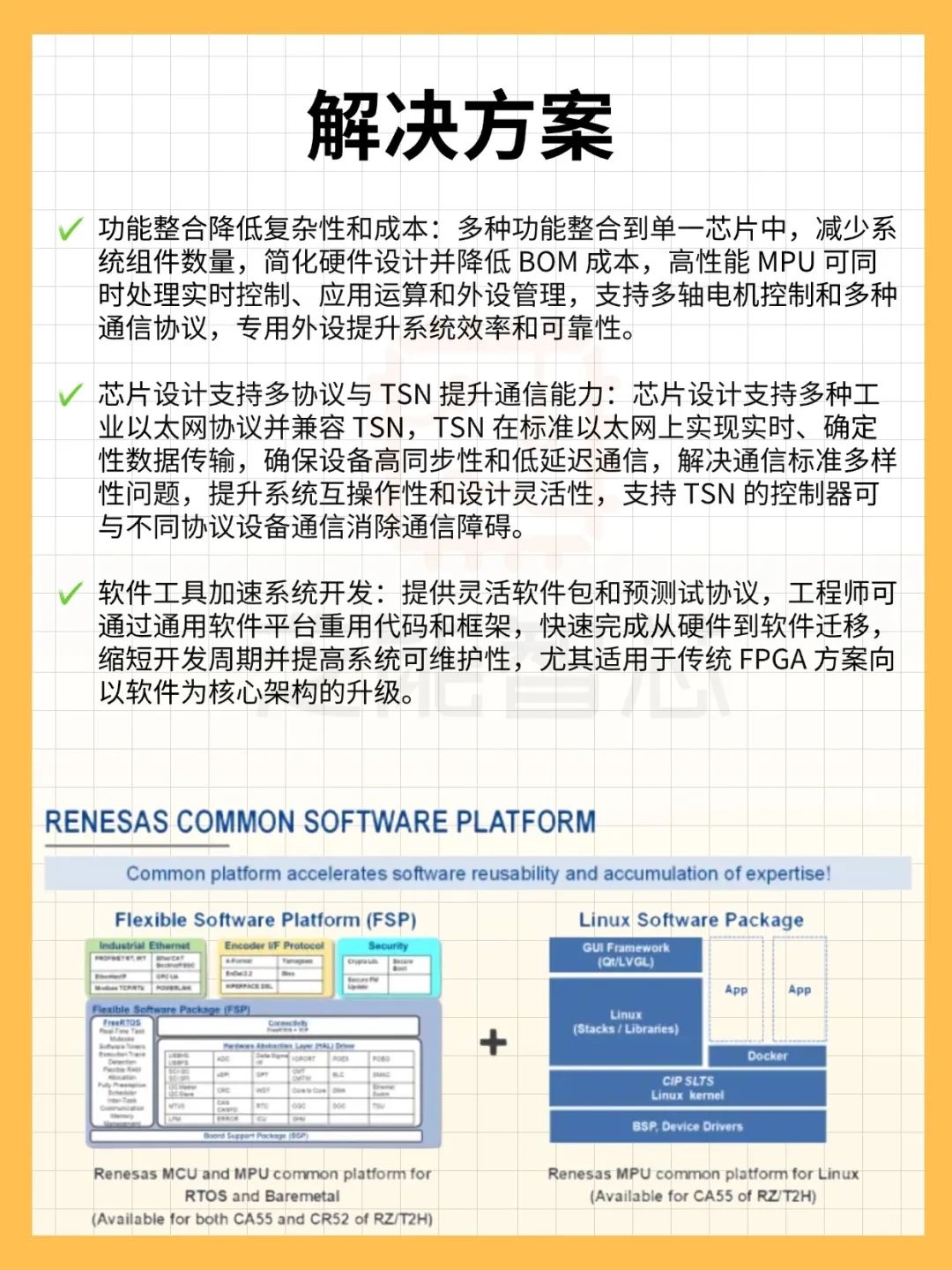
Optimizing the design of industrial robots and controllers through the integration of multiple functions into a single chip constitutes an effective strategy to mitigate complexity and reduce costs. Highly integrated chip solutions drastically decrease the number of components required for the system, thereby simplifying hardware design and lowering the Bill of Materials (BOM) costs.
The developed high-performance MPU can concurrently handle real-time control, application processing, and peripheral management, supporting multi-axis motor control and various communication protocols. This single-chip architecture not only negates the need for additional chips but also enhances system efficiency and reliability through dedicated peripherals.
To address the diversity of communication standards, chip design supports multiple industrial Ethernet protocols and is compatible with Time-Sensitive Networking (TSN). TSN technology facilitates high synchronization and low-latency communication between devices by enabling real-time, deterministic data transmission over standard Ethernet.
This multi-protocol support empowers the system to seamlessly integrate devices from diverse vendors, bolstering interoperability and design flexibility. For instance, a TSN-enabled controller can communicate with both EtherCAT and PROFINET devices, thereby eliminating communication barriers present in traditional designs.
Software tools are increasingly playing a pivotal role in modern industrial design. Providing adaptable software packages and pre-tested protocols can expedite system development and minimize integration errors. For example, through a universal software platform, engineers can reuse code and frameworks, swiftly completing the transition from hardware to software.
This approach is particularly apt for upgrading traditional FPGA solutions to software-centric architectures, shortening development cycles, and enhancing system maintainability.
Part 2: The Role of TSN and Future Trends
As a pivotal technology in industrial automation, Time-Sensitive Networking (TSN) is reshaping the design landscape of industrial robots and controllers. TSN not only augments system real-time performance and interoperability but also provides technical underpinnings for sustainability and intelligent trends.
In factory automation, real-time synchronization between devices is paramount for ensuring production efficiency and precision. TSN achieves deterministic communication over standard Ethernet through time synchronization and traffic scheduling, eradicating latency and jitter issues prevalent in traditional networks.
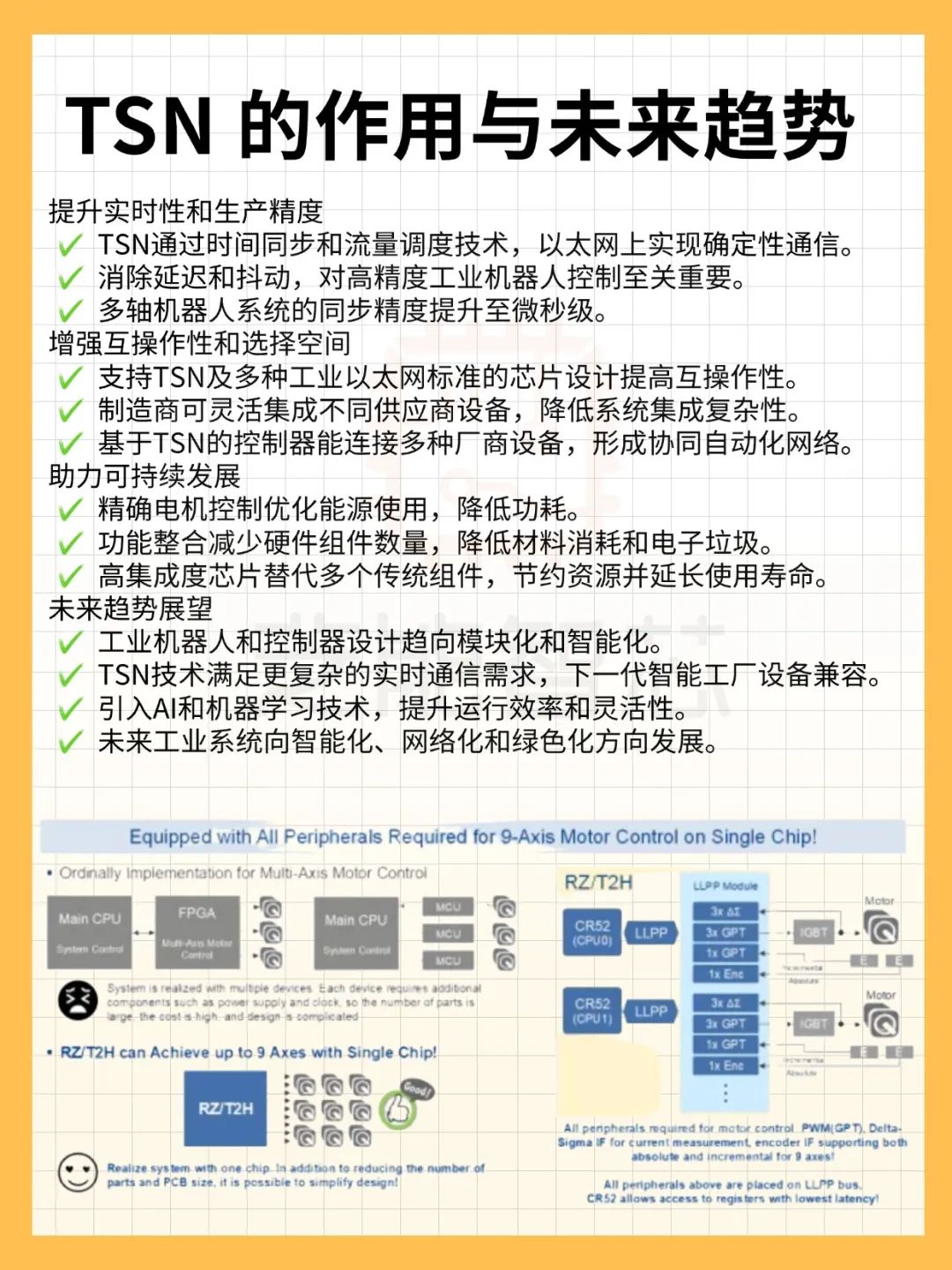
This is particularly crucial for industrial robots necessitating high-precision control. For instance, in multi-axis robot systems, the motion of each axis must be meticulously coordinated. TSN can enhance synchronization accuracy to the microsecond level, averting deviations or failures in production.
Chip designs supporting TSN and multiple industrial Ethernet standards markedly enhance system interoperability. Manufacturers can seamlessly integrate devices from diverse vendors without concerns about protocol compatibility issues. This capability diminishes the complexity of system integration and offers greater choices for enterprises. For instance, a TSN-based controller can simultaneously connect sensors, actuators, and PLCs from different vendors, forming a highly coordinated automation network.
Sustainability represents a pivotal trend in industrial design. TSN-enabled precise motor control optimizes energy usage, reducing power consumption while ensuring performance. Additionally, functional integration diminishes the number of hardware components, thereby lowering material consumption and electronic waste. A highly integrated chip can replace multiple traditional components, conserving resources and extending system lifespan, in alignment with global environmental standards.
The design of industrial robots and controllers will become increasingly modular and intelligent. Modular architectures will empower manufacturers to customize systems according to specific needs, enhancing flexibility and scalability. Meanwhile, the continuous evolution of TSN technology will support more intricate real-time communication requirements, ensuring system compatibility with next-generation smart factory equipment.
Furthermore, the integration of artificial intelligence and machine learning will bestow industrial systems with heightened autonomy. For example, predictive maintenance can optimize operational efficiency, and adaptive algorithms can enhance production flexibility. Future industrial systems will stride towards greater intelligence, networking, and greenness.
Conclusion
The design of industrial robots and controllers is undergoing a wave of technological innovation. Challenges pertaining to complexity, cost, and sustainability are propelling the industry to explore novel pathways. Through functional integration, communication optimization, and the application of TSN technology, innovative solutions are being provided to streamline design, elevate efficiency, and cater to future needs.
-
![]()
A Humanoid Robot Becomes an Office Intern: The 'Reinforcement Learning' Journey of a Former NVIDIA Engineer
-
![]()
Meta Plans to Launch Cloud Infrastructure Business: Is Computing Power Really in Excess?
-
![]()
Giants Enter the Arena One After Another: The Embodied AI Battle Commences
-
![]()
Is It More Profitable to Build 'Hands' for Robots Than 'Humans'?
-
![]()
Yunling Optoelectronics Accelerates Its Listing on the Beijing Stock Exchange: Secures 989 Million Yuan to Bolster Production of Computing Optoelectronic Chips
-
![]()
From Drill Bits to Optical Coatings: A 200-Billion-Yuan Behemoth Quietly Unveils a New Business Front!
-
![]()
New Energy Vehicle Growth Slows: Are 370 Million Existing Cars the Next Lucrative Market?
-
![]()
Is Baidu Now Fostering Its Own 'Yao Shunyu'?