Vehicle Communication Protocol Evolution: An In-Depth Analysis of CAN XL Technology Features
 07/14 2025
07/14 2025
 624
624
Produced by Zhineng Zhixin
From classic CAN to CAN FD, and now to CAN XL, in-vehicle communication protocols are progressively advancing towards higher bandwidth, larger data volumes, and enhanced scalability.
While maintaining compatibility at the physical layer, CAN XL utilizes a flexible frame format design and virtual bus support to overcome the bandwidth and functional expansion limitations of CAN FD, laying the groundwork for high-density communication in distributed electronic and electrical architectures, as well as future autonomous driving systems.
Its 2048-byte data capacity, flexible service type identification, and tunneling mechanism enable it to achieve an optimal balance between compatibility and performance.
Part 1
CAN Protocol Evolution:
From Classic Architecture to High Bandwidth Demands
Originating in the late 1980s, the CAN protocol swiftly gained traction in automotive electronic systems as a means of real-time, anti-interference, and cost-effective control communication.
Classic CAN (CAN CC) defines a frame structure with 11-bit or 29-bit IDs, capable of carrying up to 8 bytes of data per frame at a rate limited to 1 Mbit/s, meeting the requirements of traditional powertrain, chassis control, and body control systems.

To accommodate the increased data throughput demands of ADAS and infotainment systems, CAN FD introduced higher data phase rates (up to 8 Mbit/s) and a maximum data frame length of 64 bytes, while maintaining 1 Mbit/s in the arbitration phase for bus compatibility.
This "phase rate separation" mechanism ensures a seamless protocol transition, but in the context of the growing popularity of autonomous driving and centralized architectures, its bandwidth and functionality still pose challenges.
CAN XL emerged, defining a new XLFF frame format that, while maintaining physical layer compatibility with CAN FD, expands payload to 2048 bytes, supports higher bit rate transmission (up to 20 Mbit/s), and introduces virtual channels and service identifiers to bolster protocol flexibility and inter-domain isolation capabilities.
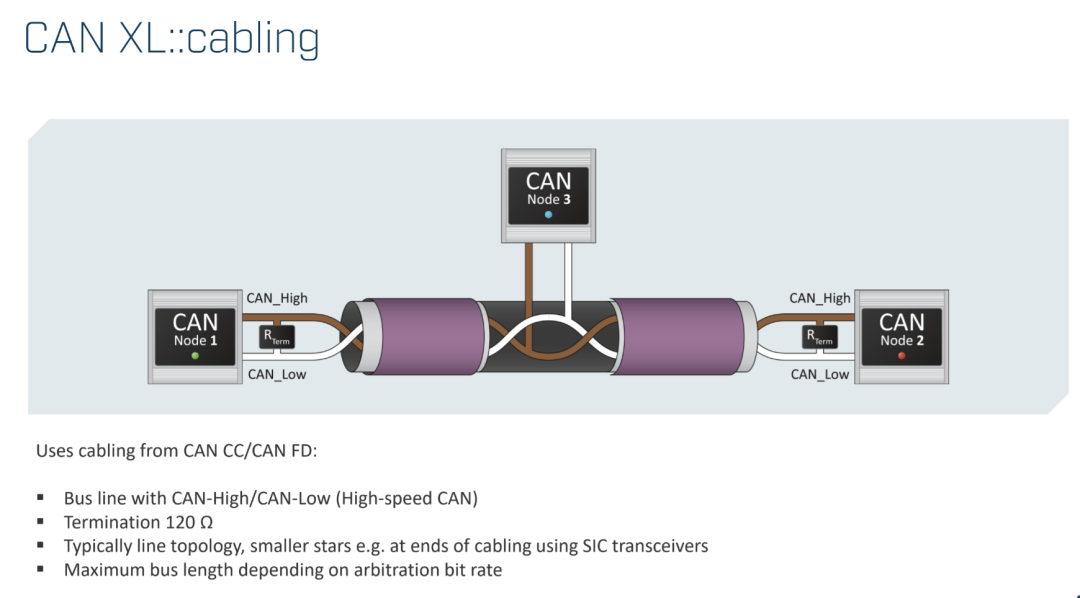
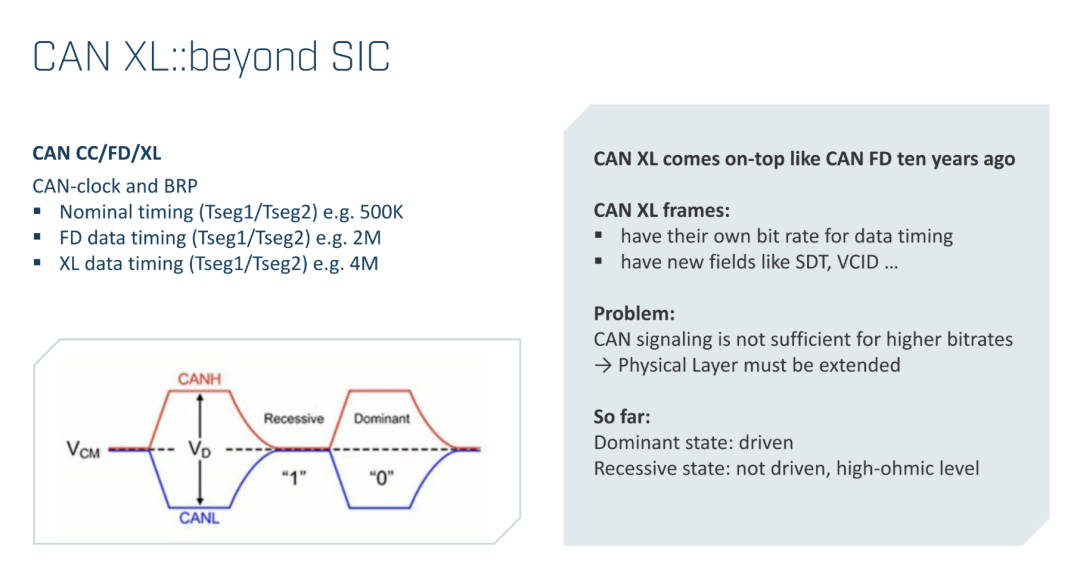
● Physical Layer Inheritance: CAN XL continues the CAN-H/CAN-L two-wire bus structure used by CAN CC/FD, with 120Ω termination resistors and bus or star topologies, ensuring smooth upgrades based on existing network wiring.
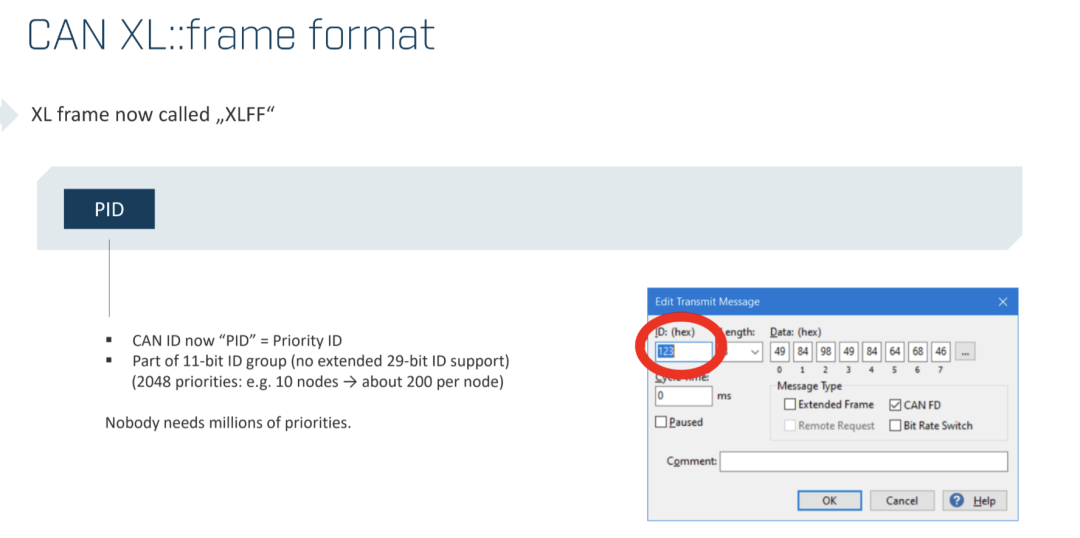
● Frame Format Expansion: The XLFF frame introduces PID (Priority Identifier) as a new 11-bit ID method, abandoning support for 29-bit extended IDs, thereby increasing the number of priorities within a fixed ID length and improving scheduling efficiency.
● Enhanced Data Capacity: Through 11-bit DLC encoding, CAN XL achieves a data carrying capacity of 1 to 2048 bytes, more than 32 times that of CAN FD, enabling it to support large-scale data transmission tasks such as image fragments and sensor big data.
● Dual CRC Mechanism: Utilizing a dual redundant checksum structure of PCRC and FCRC, protecting the frame prefix and complete frame content respectively, enhances data integrity and transmission stability.
● Virtual Network Support (VCID): The 8-bit VCID field assigns a virtual bus affiliation to frames, enabling logical domain separation and regional communication routing, a crucial foundation for supporting regional control architectures.
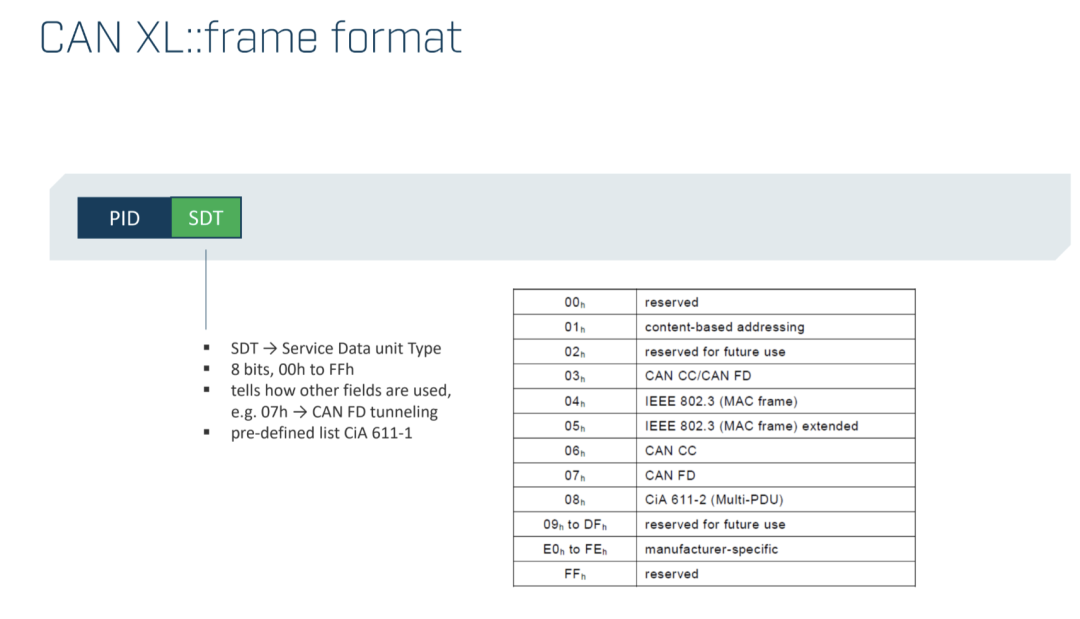
● Tunneling Mechanism: By indicating encapsulated content through the SDT field, CAN XL can directly transmit CAN CC, CAN FD, and even Ethernet MAC frame content, bridging different protocols and providing technical support for hybrid networks.
As the third-generation upgrade to the CAN protocol family, CAN XL not only inherits the electrical characteristics of the physical layer, preserving existing toolchains and engineering experience, but also systematically addresses bandwidth bottlenecks and insufficient functional encapsulation capabilities.
Its protocol design embodies an engineering mindset that prioritizes modularity, scalability, and backward compatibility, making it technically feasible to replace some Ethernet applications in in-vehicle communication backbone networks.
Part 2
Core Structure and High-Speed Transmission Mechanism of CAN XL
The CAN XL protocol frame comprises multiple functional fields, each designed to bolster performance and structural flexibility:
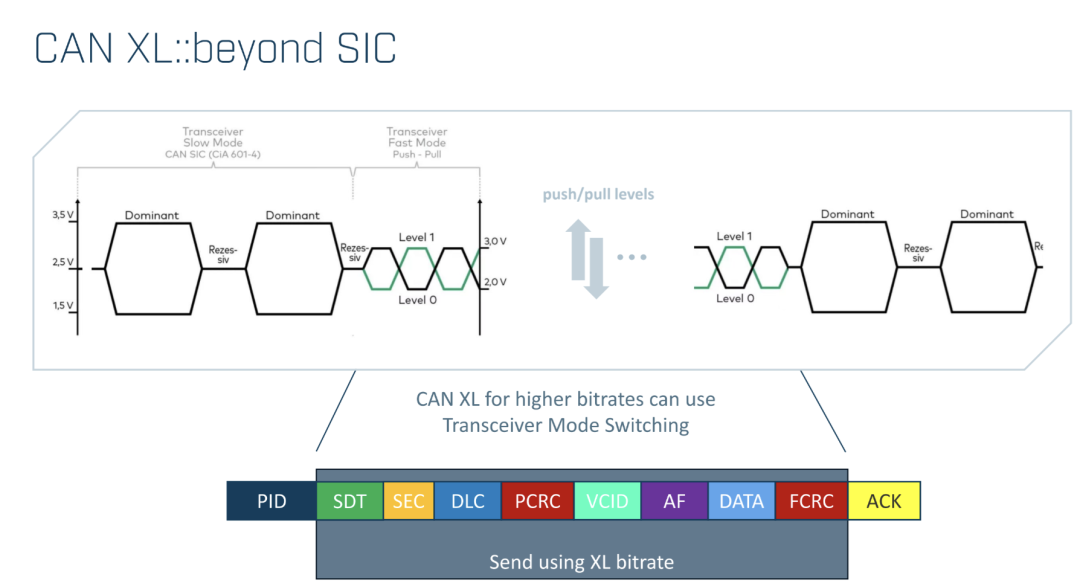
● Service Data Unit Type (SDT): The 8-bit SDT field grants CAN XL multi-protocol carrying capacity, allowing nodes to select different processing methods based on the field value. For instance, a value of 07h indicates a CAN FD tunnel frame, useful for forwarding CAN FD messages over CAN XL; values 04h/05h correspond to IEEE 802.3 encapsulation, providing a path for Ethernet hybrid networks.
● Extended Structure Control Bit (SEC): This bit marks whether the extended header of the data message is enabled, facilitating subsequent protocol support for encryption, authentication, or segmented transmission, with potential for evolution towards secure communication protocols.
● Acceptance Filter (AF) Field: The 32-bit AF field supports rich filtering methods based on SDT definitions. For example, in CAN FD tunneling mode, the AF field can be mapped to the original CAN ID, providing a basis for hybrid protocol scheduling and security isolation.
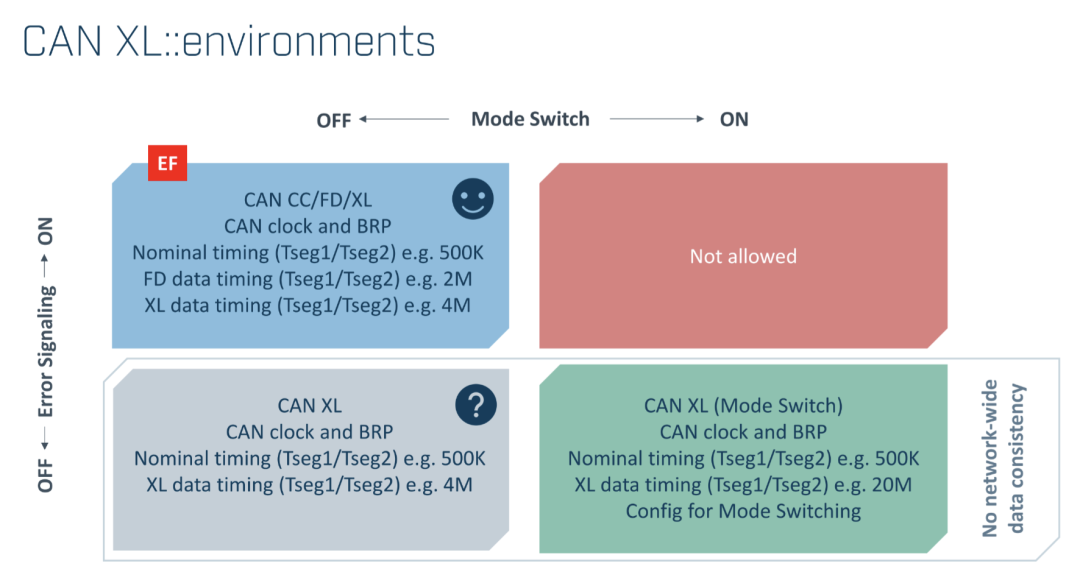
● Error Handling and ACK Mechanism Enhancements: Under configurations enabling mode switching, CAN XL no longer supports traditional error frames, with ACK confirmation bits sent at the XL bit rate. This change stems from the instability of error signal propagation in high bit rate scenarios, improving system stability by eliminating error frames.
● SIC Transceiver and Push-Pull Mode Support: To support transmission rates exceeding 8 Mbit/s, CAN XL introduces SIC (signal improvement capability) transceivers and a level drive mode switching mechanism. During the data phase, the driver forms different levels (e.g., 3.5V dominant, 2.5V recessive) through push-pull to enhance signal integrity, ensuring reliable transmission at higher rates.
● Transmission Timing and Mode Switching Strategy: In mixed mode, CAN XL nodes can select whether to enable mode switching based on configuration. In the default configuration, it is compatible with CAN FD and CAN CC transceiver logic, ensuring that older devices operate normally in the same bus environment; in high-performance scenarios, enabling push-pull transmission and XLFF exclusive frames can achieve data transmission rates of up to 20 Mbit/s.
● Development and Testing Interface Support: Currently, USB-based PCAN-XL interfaces and analysis software from PEAK support CAN XL, enabling communication with CAN XL networks via the PCAN-Basic API for tasks such as development, debugging, and protocol stack verification, accelerating the engineering implementation process.
In its transmission mechanism, CAN XL systematically enhances the protocol's anti-interference capability, data integrity, and application flexibility through the introduction of push-pull physical drive, level mode switching, dual CRC checksum, virtual channel ID, SDT service separation, and other mechanisms.
The protocol's tailorability also makes it easier to integrate into domain controllers and cross-domain communication backbone networks in the future, moving towards software-defined automotive architectures that combine openness and stability.
Summary
The advent of CAN XL signifies a significant advancement for in-vehicle communication protocols towards high performance and scalability. Compared to a direct migration to Ethernet architecture, CAN XL strikes an optimal balance between hardware reusability, protocol compatibility, system stability, and engineering implementation costs.
Its frame structure's scalability and native support for virtual domains and tunneling encapsulation position it well to serve future needs in autonomous driving, centralized EE architectures, regional control, and in-vehicle sensor fusion.
Rather than a complete replacement for CAN FD, CAN XL is more likely to serve as a complementary role in high-bandwidth communication scenarios, alongside CAN FD and Ethernet, constituting a "layered backbone" for in-vehicle communication systems.
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'
-
![]()
Zhipu's Trillion-Dollar Valuation: A New Chapter for China's AI
-
![]()
Is Laifen, a 'Dyson Alternative' on the Rise, Now Ensnared by the 'Alternative Curse'?
-
![]()
Beyond Patents: Insta360 and DJI Compete in Retail
-
![]()
Piercing Through Industry Chaos: The Curtain Rises on Compliance for Autonomous Driving






