Distinguishing Rule-Based Decision-Making from End-to-End Large Models in Autonomous Driving
 04/14 2025
04/14 2025
 672
672
The evolution of autonomous driving technology reveals a diversifying approach in path selection. Initially optimistic about vehicle-road coordination, the industry has since gravitated towards single-car intelligence. In terms of architecture, autonomous driving has transitioned from a three-tiered model of perception, decision-making, and execution to the currently favored end-to-end large models. Following Tesla's introduction of FSD V12 in 2024, numerous automakers have unveiled their own end-to-end models, a trend that has become a staple of industry press conferences. However, the distinctions between these technologies remain obscure to many, particularly regarding end-to-end models. This article will elucidate these concepts using an engaging analogy.

Rule-Based Decision-Making
Rule-based decision-making hinges on expert-formulated algorithms and explicit logical rules, often structured modularly. The perception system breaks down complex tasks such as image preprocessing, object detection, tracking, and decision-making into manageable subtasks, each module fulfilling a specific function. This approach boasts strong interpretability and ease of debugging. When errors arise, engineers can swiftly pinpoint and rectify issues by updating rules or algorithm parameters. Moreover, the modular design facilitates verification and supervision, aligning with current safety standards and regulations.
Despite its merits, rule-based methods are constrained by their reliance on prior knowledge and empirical summaries, making them robust in standardized environments but fallible in complex, variable, or rare scenarios. This can lead to sluggish responses and blurred safety boundaries, limiting the system's robustness and generalization.
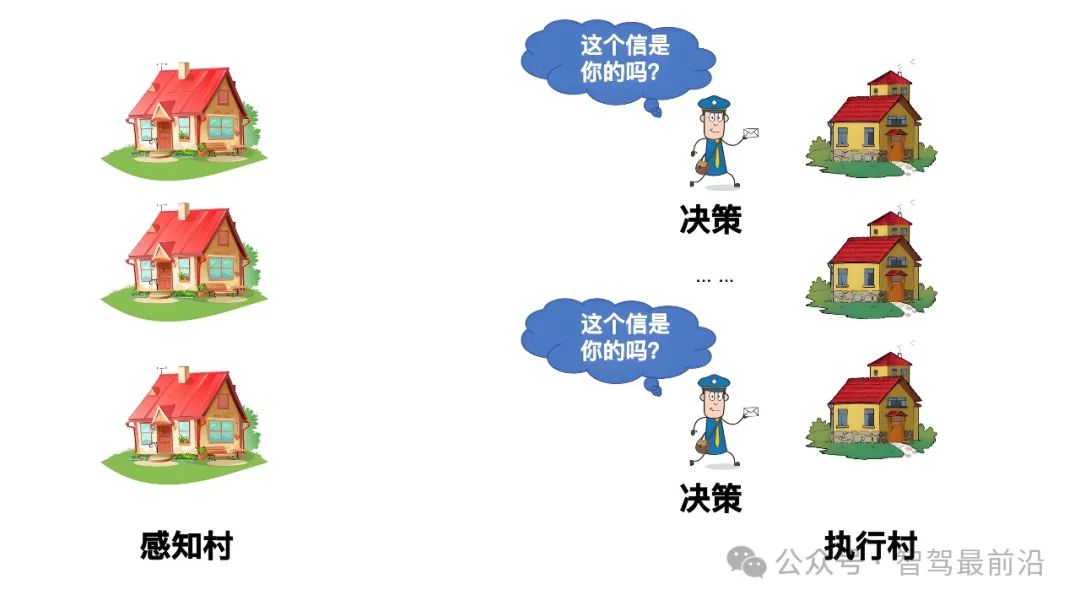
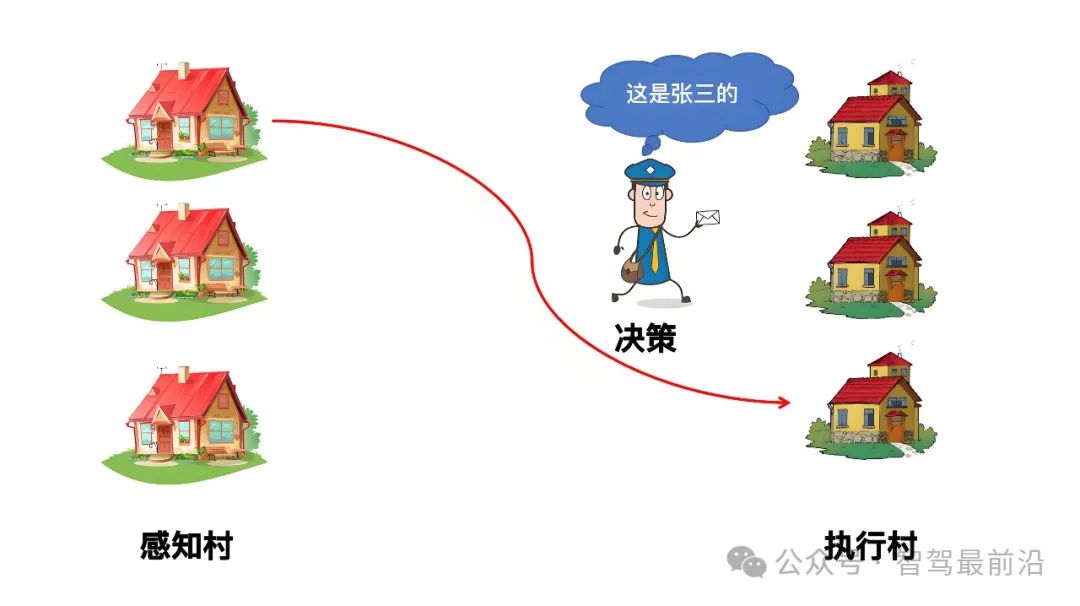
To illustrate, consider a small island with two villages, Perception and Execution. Perception Village regularly sends letters to Execution Village, entrusted to a courier named "Decision." Upon starting, "Decision" is briefed on Execution Village's households and must deliver each letter personally to ensure accurate delivery.

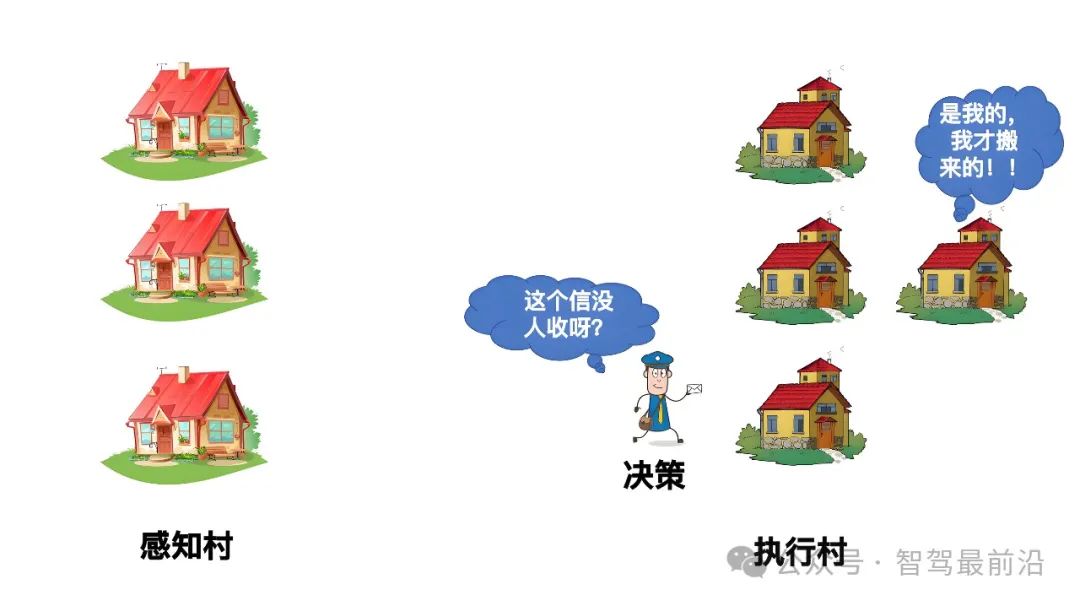
Adhering strictly to the rules, "Decision" receives letters marked with Execution Village residents' names, travels to Execution Village, and knocks on doors to confirm recipients. This method, while precise, is time-consuming and prone to errors, such as lost letters or undelivered mail to new residents due to a lack of updated rules.


End-to-End Large Models
End-to-end models leverage extensive data to train neural networks, enabling them to derive control decisions directly from raw sensor data (like camera images or LiDAR point clouds). This method capitalizes on deep learning's prowess in pattern recognition and feature extraction, adeptly capturing implicit correlations in complex environments and demonstrating robust generalization. With sufficient high-quality data, end-to-end models excel in learning about anomalies and subtle features, particularly in urban traffic, emergencies, and multi-sensor fusion.
However, end-to-end models are notorious for their "black box" nature, rendering decision-making processes inscrutable and troubleshooting cumbersome. Moreover, over-reliance on training data can introduce bias, compromising generalization and safety.
Returning to our analogy, as "Decision" gained experience, he realized the inefficiencies of his original method and sought improvements. He began memorizing residents' names, enabling him to deliver letters directly without knocking on every door. This significantly enhanced efficiency but introduced uncertainty; errors became harder to trace, exemplifying the "black box" challenge.



Final Thoughts
The examples provided offer a simplified glimpse into rule-based decision-making and end-to-end models. In reality, the technologies are far more intricate. Rule-based systems excel in clarity, debuggability, and verification, ideal for scenarios requiring safety and controllability. Conversely, end-to-end models shine in adaptability and complex scenario handling, discovering patterns autonomously. However, their interpretability and safety verification pose challenges. Future research should focus on integrating both approaches to ensure real-time performance, accuracy, safety, fault tolerance, and adaptability. With data accumulation and computational advancements, hybrid designs are poised to redefine autonomous driving, steering it towards greater intelligence, reliability, and popularity.
-- END --
-
![]()
A Humanoid Robot Becomes an Office Intern: The 'Reinforcement Learning' Journey of a Former NVIDIA Engineer
-
![]()
Meta Plans to Launch Cloud Infrastructure Business: Is Computing Power Really in Excess?
-
![]()
Giants Enter the Arena One After Another: The Embodied AI Battle Commences
-
![]()
Is It More Profitable to Build 'Hands' for Robots Than 'Humans'?
-
![]()
Yunling Optoelectronics Accelerates Its Listing on the Beijing Stock Exchange: Secures 989 Million Yuan to Bolster Production of Computing Optoelectronic Chips
-
![]()
From Drill Bits to Optical Coatings: A 200-Billion-Yuan Behemoth Quietly Unveils a New Business Front!
-
![]()
New Energy Vehicle Growth Slows: Are 370 Million Existing Cars the Next Lucrative Market?
-
![]()
Is Baidu Now Fostering Its Own 'Yao Shunyu'?