From vehicle-road coordination to vehicle-road-cloud network, does AI catalyze intergenerational leap?
 11/21 2024
11/21 2024
 797
797
In today's era of rapid technological development, the transportation sector is undergoing a profound transformation. Evolving from traditional transportation modes to intelligent transportation systems, the emergence of vehicle-road coordination technology has brought new opportunities for enhancing transportation safety and efficiency. However, with the explosive growth of artificial intelligence, computing power, and data, the integrated vehicle-road-cloud system has emerged as a key force driving the transportation sector towards a higher level of intelligence. Recently, Zhu Lei, founder of MoGo Auto, proposed that the "vehicle-road-cloud network is the starting point and prototype of the next-generation 'perception-communication-computation' network, with the core function of digitally representing the physical world in real-time to serve multiple intelligent agents."
I. The development history and current status of vehicle-road coordination
1. Historical evolution of vehicle-road coordination
1. In the late 1950s, General Motors built a concept highway embedded with numerous communication devices in New Jersey, sowing the seeds for the development of vehicle-road coordination technology.
2. In the 1990s, Japan established intelligent transportation systems as a national project, further promoting research and development of vehicle-road coordination technology globally.
3. In 2006, the European Union launched the Cooperative Vehicle-Infrastructure System (CVIS) project, providing more experience and reference for the practical application of vehicle-road coordination technology.
4. In 2010, the United States proposed the Intelligent Drive strategy, emphasizing the importance of vehicle-road coordination in intelligent transportation.
5. In 2011, China's Ministry of Science and Technology established a key technology research project for intelligent vehicle-road systems under the 863 Plan, marking China's official entry into the research and development of vehicle-road coordination technology.
II. Definition and measurement criteria of vehicle-road coordination
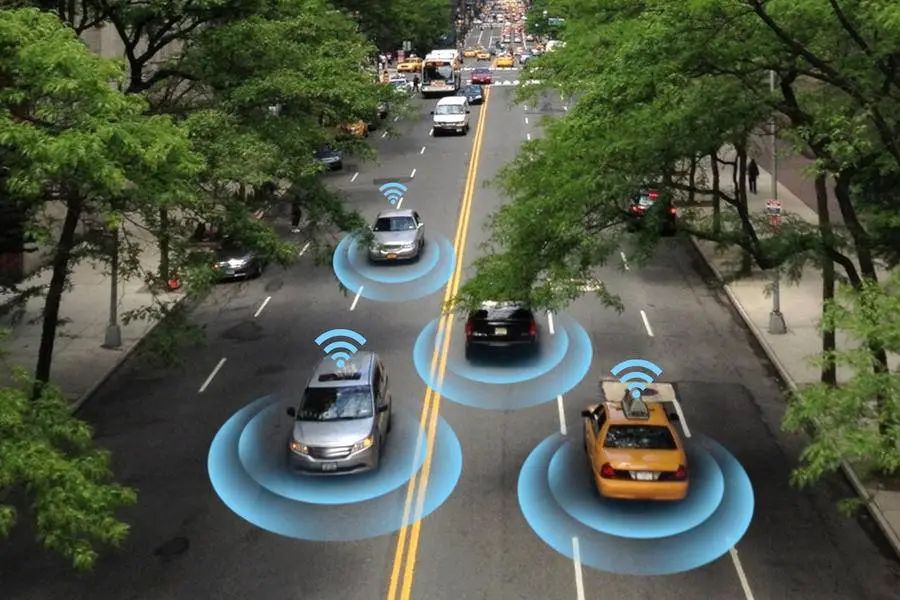
1. Vehicle-road coordination is an intelligent transportation system that realizes coordinated human-vehicle-road control based on the Internet of Vehicles. Through comprehensive coordination among vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N), and vehicle-to-pedestrian (V2P), it meets the application requirements of autonomous vehicles at different levels, achieving the optimal development goals of both individual autonomous vehicles and the overall traffic system.
2. Measurement criteria include the levels of informatization, intelligence, coordination, integration, and application scenarios. Informatization requires comprehensive real-time dynamic information exchange between vehicles and roads, with traffic information stored in databases to provide information support for decision-making and control. Intelligence is based on traffic environment information, achieving the expected autonomous driving functions through multidisciplinary integration. Coordination emphasizes autonomous vehicle functions based on comprehensive real-time traffic information collection and fusion, reflecting effective "human-vehicle-road" collaboration. Integration aims to achieve autonomous vehicle driving by integrating smart connected road systems and related software, hardware, and specific functions of smart connected vehicles. Application scenarios encompass time, space, and environment, as well as mixed traffic and active safety systems.
3. The development of vehicle-road coordination technology has gone through multiple stages. In the past, it primarily relied on advanced wireless communication and the new generation of the Internet to achieve real-time dynamic information exchange between vehicles and roads, and carried out active safety control and road coordination management based on comprehensive real-time traffic information collection and fusion. Its core objective is to achieve effective coordination among humans, vehicles, and roads to ensure traffic safety, improve traffic efficiency, and form a safe, efficient, and environmentally friendly road transportation system.
III. Current status and challenges of vehicle-road coordination
Currently, vehicle-road coordination technology is widely applied and promoted globally. Countries are increasing investment in research and development of vehicle-road coordination technology, building intelligent transportation demonstration zones, and promoting the implementation of this technology. However, vehicle-road coordination technology also faces some challenges during its development. For instance, it involves the coordinated deployment and decision-making of multiple ports, posing significant technical difficulties. Additionally, it demands high stability, low latency, adaptability, and compatibility from in-vehicle operating systems, and there are certain difficulties in data fusion. Meanwhile, the intelligent transformation of road infrastructure requires government support, and the upgrading of communication network environments needs to address the issue of smooth switching between different networks.
IV. Technological transformation from vehicle-road coordination to vehicle-road-cloud network
Changes in perception level
1. Roadside and in-vehicle data sources
During the vehicle-road coordination stage, roadside data primarily comes from traditional transportation facilities such as traffic lights and cameras, while in-vehicle data mainly originates from onboard sensors like radars and cameras. These data sources are relatively limited and insufficient to meet the perception demands of complex traffic scenarios.
In contrast, during the vehicle-road-cloud integration stage, roadside data sources are more diverse, including intelligent roadside units (RSU) and edge cloud computing devices in addition to traditional transportation facilities. In-vehicle data is not restricted to onboard sensors but can also be obtained in real-time from roadside and cloud sources through the vehicle-road-cloud network, enabling multi-source data fusion. MoGo Auto has taken the lead in perception, achieving efficient fusion of roadside and in-vehicle data through its vehicle-road-cloud integration system, providing more accurate and comprehensive perception data for intelligent transportation.
2. Data fusion
Data fusion during the vehicle-road coordination stage primarily occurs on the vehicle side, achieving vehicle perception and decision-making through data fusion from a few onboard sensors. However, this method struggles to process massive amounts of data from various sources and has limited fusion effects.
In the vehicle-road-cloud integration stage, data fusion is widely applied on the roadside and in the cloud. Through intelligent roadside systems and communication platforms, multi-level information fusion of roadside and in-vehicle data is conducted to achieve higher-level comprehensive decision-making. Due to the significant differences in data characteristics from various sources, in-vehicle operating systems are required to perform multi-level information fusion at the data, feature, and decision levels to enhance perception accuracy and reliability.

Changes in the computation level
1. Computing power enhancement
During the vehicle-road coordination stage, vehicle computation primarily relies on onboard computing devices with limited computing power. In contrast, the vehicle-road-cloud integration stage leverages the synergy between edge cloud computing and central cloud computing to distribute numerous computing tasks to the roadside and cloud, significantly boosting computing power. Simultaneously, with the development of artificial intelligence technology, the vehicle-road-cloud network deploys "end-to-end" AI large models, further improving computational efficiency and accuracy.
2. Algorithm-model changes
(1) From Rule-base to neural network
During the vehicle-road coordination stage, autonomous driving primarily adopts the Rule-base approach, which is rule-driven and specified by humans. This method requires human engineers to write extensive code to cover various driving scenarios but often struggles with uncommon edge cases and fails to achieve smooth driving effects.
In the vehicle-road-cloud integration stage, AI large models based on the Transformer architecture of ChatGPT are widely applied. These models learn from human driver training materials to plan paths. Neural networks directly receive data from input ends (including camera perception data, vehicle body data, etc.), and after processing by AI large models, directly output to the accelerator, brake, and steering wheel, achieving end-to-end decision-making and enhancing autonomous driving performance and adaptability.
(2) Changes in deep learning networks
Deep learning networks have undergone further development and application in the vehicle-road-cloud integration stage. Through extensive data training, deep learning networks can automatically learn features and patterns in traffic scenarios, improving perception and decision-making accuracy. Additionally, continuous optimization and improvement of deep learning networks provide technical support for enhancing the performance of the vehicle-road-cloud integration system.
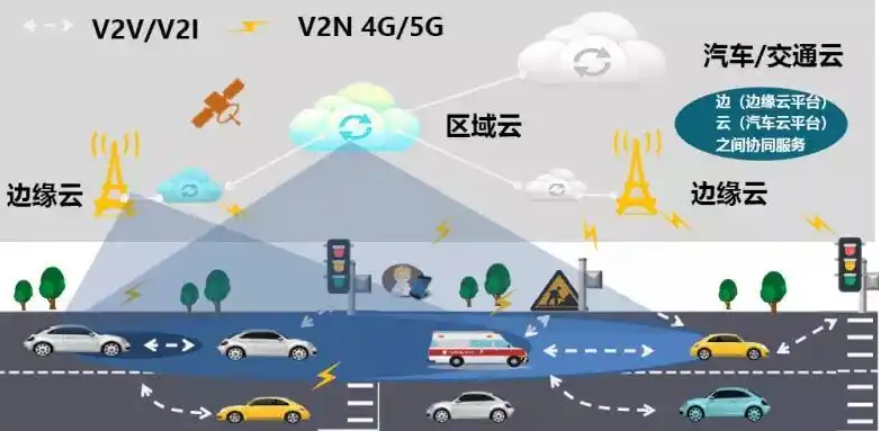
Changes in the communication level
1. During the vehicle-road coordination stage, communication primarily relies on the V2X private network, which, although capable of achieving a certain level of vehicle-to-vehicle and vehicle-to-road information exchange, has issues such as limited coverage and high costs. In contrast, the vehicle-road-cloud integration stage leverages advancements in V2X and 5G-A technologies to provide more efficient and reliable communication means for the vehicle-road-cloud network. V2X technology enables comprehensive coordination among vehicles, roads, networks, and pedestrians, while 5G-A technology offers a low-latency, high-bandwidth, and highly stable communication environment, ensuring real-time information exchange between the vehicle and roadside ends.
2. The vehicle-road-cloud integration system has extremely high requirements for communication latency because, in real traffic scenarios, vehicles must process massive amounts of high-concurrency data in real-time with low latency and high reliability to ensure task scheduling efficiency. The low-latency feature of 5G-A technology enables the vehicle-road-cloud network to meet these requirements, improving traffic system safety and efficiency.
V. The significance of constructing the vehicle-road-cloud 'perception-communication-computation' network
1. Realizing real-time digitization of the physical world
The essence of the vehicle-road-cloud network is the 'perception-communication-computation' network, achieving real-time digitization of the physical world. This means that through the vehicle-road-cloud integration system, traffic scenarios, vehicle states, road conditions, and other information in the real world can be converted into digital signals in real-time for efficient processing and analysis. This real-time digitization capability provides a new perspective and means for traffic management, vehicle control, and travel services.
2. Providing precise decision-making support for intelligent transportation
(1) Real-time data collection and analysis
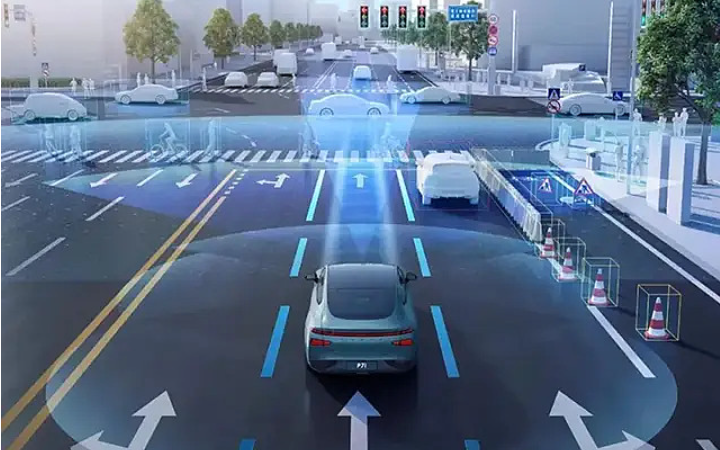
The 'perception-communication-computation' network enables comprehensive perception of the traffic environment, including vehicle locations, speeds, directions, road congestion, traffic light statuses, etc. Through numerous sensors and data collection devices, this information is transmitted to the cloud in real-time for analysis and processing. Utilizing advanced data analysis algorithms and artificial intelligence technology, traffic issues can be quickly and accurately identified, and traffic flow changes can be predicted, providing scientific decision-making support for traffic management departments. For example, when traffic congestion occurs on a certain road segment, the system can immediately detect and analyze the cause of congestion, such as accidents, construction, or excessive traffic. Based on the analysis results, traffic management departments can promptly take measures such as adjusting traffic light timings, issuing traffic guidance information, or dispatching traffic police to alleviate congestion and improve road efficiency.
(2) Optimizing traffic signal control
Traditional traffic signal control primarily relies on fixed time cycles and preset schemes, making it difficult to adapt to dynamic traffic flow changes. In contrast, the 'perception-communication-computation' network enables real-time optimal control of traffic signals. Through real-time monitoring and analysis of intersection vehicle flow and pedestrian crossing needs, the system can automatically adjust traffic light timings to achieve intelligent timing at intersections. This minimizes vehicle waiting times, enhances intersection capacity, and reduces traffic congestion. For instance, during peak hours, the system can automatically extend green light timings based on real-time traffic flow to allow more vehicles to pass through intersections. During off-peak hours, signal light cycles can be shortened to reduce energy consumption. Additionally, for intersections with heavy pedestrian traffic, the system can prioritize pedestrian crossing needs to ensure pedestrian safety.
(3) Enhancing autonomous driving safety and reliability
For autonomous vehicles, the 'perception-communication-computation' network provides crucial support. Through vehicle-road and vehicle-cloud coordination, autonomous vehicles can obtain real-time information about surrounding vehicles, roads, and the environment, making advance decisions and plans to avoid potential hazards. For example, when an autonomous vehicle approaches an intersection, the system can inform the vehicle in advance about the intersection's traffic light status and the movements of other vehicles, allowing the vehicle to prepare for deceleration, stopping, or turning.
Furthermore, the 'perception-communication-computation' network enables remote monitoring and management of autonomous vehicles. In the event of vehicle malfunctions or anomalies, the system can promptly notify relevant departments for handling to ensure vehicle and passenger safety. Simultaneously, through the analysis of extensive autonomous vehicle data, autonomous driving algorithms can be continuously optimized, enhancing autonomous driving safety and reliability.
3. Promoting coordinated development of intelligent devices
(1) Serving multiple intelligent devices
The 'perception-communication-computation' network not only serves intelligent connected vehicles but also provides real-time data services for a series of intelligent devices such as drones, flying cars, robots, and robotic dogs. These intelligent devices have broad application prospects in various scenarios, such as logistics distribution, urban patrolling, and environmental monitoring. Through the 'perception-communication-computation' network, they can achieve coordinated interaction with the transportation system, improving work efficiency and service quality.
(2) Facilitating collaboration among intelligent devices
By sharing data and information, intelligent devices can achieve task allocation, resource optimization, and collaborative decision-making.
4. Enhancing the level of urban transportation intelligence management
(1) Traffic flow monitoring and prediction
The 'perception-communication-computation' network enables real-time monitoring and prediction of urban traffic flow. Through sensors and data collection devices distributed across urban roads, the system can obtain vehicle travel trajectories, speeds, volumes, and other information for analysis and processing. Leveraging big data and artificial intelligence technology, future traffic flow trends can be predicted over a period, providing references for urban transportation planning and management.
(2) Intelligent transportation guidance
The 'perception-communication-computation' network provides intelligent transportation guidance services for travelers. Through mobile apps, in-car navigation, and other terminal devices, travelers can obtain real-time road conditions, traffic incidents, optimal travel routes, and other information. Based on travelers' destinations and real-time traffic conditions, the system can provide personalized future guidance plans spanning from tens of seconds to a few minutes, helping travelers avoid congestion and choose optimal travel routes.
(3) Traffic emergency management
In the event of emergencies such as traffic accidents and natural disasters, the 'perception-communication-computation' network plays a crucial role in emergency management. The system can quickly detect incidents and promptly notify relevant departments for handling. By transmitting on-site images, videos, and other information in real-time, rescue personnel can accurately understand the situation and formulate reasonable rescue plans.
Over the past decade, from vehicle-road coordination to vehicle-road-cloud integration, technologies in perception, computation, and communication have continuously evolved, with the construction of the 'perception-communication-computation' network becoming the key to achieving technological upgrades. The vehicle-road-cloud integration system provides precise decision-making support for intelligent transportation by realizing real-time digitization of the physical world, promotes the coordinated development of intelligent devices, enhances the level of urban transportation intelligence management, and plays a vital role in great power technological competition. As a pioneer in the field of vehicle-road-cloud integration, MoGo Auto has achieved remarkable results in perception, computation, and communication.
Its vehicle-road-cloud integration system and algorithms have reached the industry's highest standard of "dual SL3", deeply integrating with multiple leading automakers to enable real-time data sharing of vehicle-road-cloud networks for social vehicles. In the future, with continuous technological advancements and expanding applications, vehicle-road-cloud integration will bring more extensive development opportunities to the transportation sector, enhancing convenience and safety for people's travel and daily lives. Globally, countries are actively promoting the construction and application of vehicle-road-cloud integration. China's Ministry of Industry and Information Technology and four other departments jointly released a list of pilot cities for the application of "vehicle-road-cloud integration" in intelligent connected vehicles, marking the entry into a large-scale implementation phase for vehicle-road-cloud integration in China. It is believed that with the joint efforts of the government, enterprises, and all sectors of society, China will achieve more remarkable accomplishments in the field of vehicle-road-cloud integration, contributing Chinese wisdom and solutions to the global development of intelligent transportation.
-
Why is There a Shortage of High-Quality Tokens? Three New Signals in AI Infrastructure Development
-
![]()
Why Hasn’t AI-Driven Payment Flourished Despite Tech Giants’ Push?
-
![]()
Intensify Efforts in the High-End Optoelectronic Semiconductor Sector! Aipu Dingchun and Jiangsu Meidong Forge a New Joint Venture
-
![]()
From Endoscopes to Optical Interconnects for AI Computing Power: A Veteran Optical Company's Strategic Shift
-
![]()
Behind the Scenes of Token Factories' Rise as a Capital Market Sensation
-
![]()
What Does MaaS Ultimately Bring to Chinese Cloud Providers? | In-Depth Industry Analysis
-
![]()
China’s Auto Resale Value Report Unveiled: AITO M9 Electric and Hybrid Variants Dominate Rankings
-
![]()
Dialogue with Huang Yangming: On the Eve of the Physical AI Boom, the Value of Data Infrastructure Begins to Materialize