End-to-End: The New Engine for Autonomous Driving?
 01/21 2025
01/21 2025
 727
727
In recent years, the rapid advancement of autonomous driving technology has revolutionized the automotive industry. From basic perception to advanced intelligent decision-making, every aspect strives for peak efficiency and intelligence. End-to-End technology, an innovative system design approach, has emerged as a hot topic due to its minimalistic architecture and high-performance capabilities. Unlike traditional modular designs, End-to-End technology seeks to unify the entire autonomous driving system through a deep neural network, directly mapping sensor data inputs to driving control outputs, bypassing cumbersome intermediate processes. This design philosophy not only disrupts traditional architectures but also opens new avenues for future technological development.
Traditional autonomous driving systems often adopt a layered modular design, with perception, prediction, decision-making, and control operating independently. Each module communicates data through complex interfaces. While this method is mature, it often encounters limitations in dynamic and complex urban traffic environments. The independence between modules can lead to lower overall system efficiency, and individual optimization of each module may amplify errors during transmission, affecting the final decision quality. End-to-End technology addresses this issue through a unified deep learning model, significantly enhancing the system's overall efficiency and adaptability.
The rise of End-to-End technology is not just a natural progression of technological development but also an urgent response to industry demands. As autonomous driving progresses, scene complexity and system functional requirements are growing exponentially. Relying solely on traditional modular design is no longer sufficient to meet future needs. For instance, urban roads present a diverse range of driving scenarios that require the system to efficiently handle various dynamic situations involving pedestrians, non-motorized vehicles, traffic lights, and other factors.
The advantage of End-to-End technology lies in its global optimization capabilities, enabling autonomous driving systems to exhibit higher adaptability and robustness in complex scenarios. The rapid development of deep learning has also fueled the application of End-to-End technology. Since the advent of deep neural networks, their powerful feature extraction capabilities have demonstrated significant advantages in image recognition, speech processing, and other fields. Today, the integration of deep learning and autonomous driving has extended beyond perception modules to decision-making and control, driving the implementation of End-to-End technology.

What is End-to-End Technology?
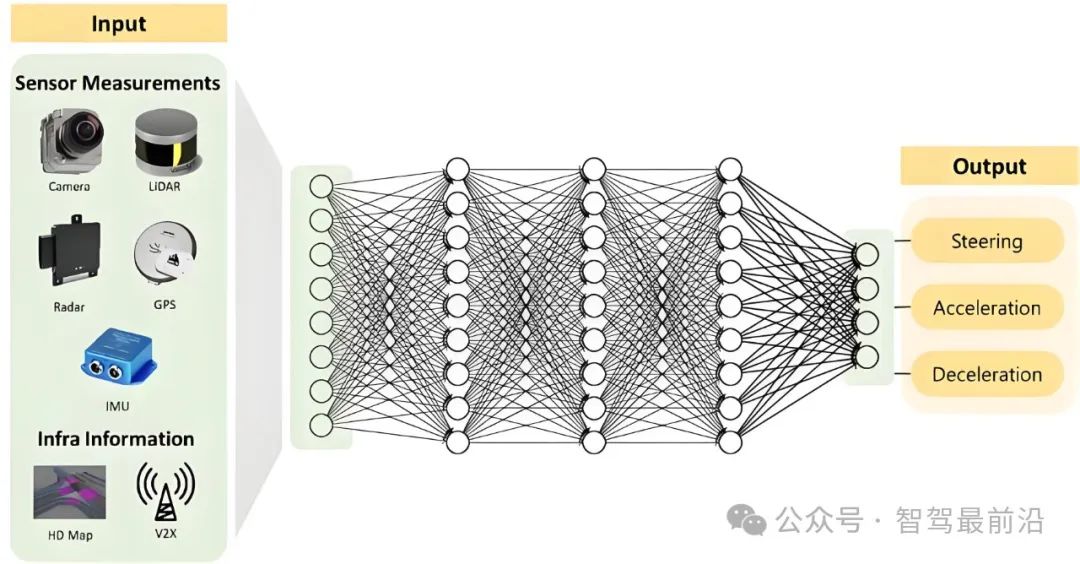
End-to-End technology is a novel system design concept that aims to complete the entire chain of operations from input to output through a unified deep learning model. In the realm of autonomous driving, this technology's core lies in using a neural network model to directly map sensor data to vehicle control commands, such as steering, acceleration, or braking, thereby eliminating the need for separate perception, prediction, decision-making, and control modules found in traditional systems. The introduction and application of this concept are not only the result of deep learning technology development but also a crucial step for autonomous driving systems to achieve higher efficiency and adaptability.
Traditional autonomous driving systems consist of multiple independent modules that handle specific tasks like perception, path planning, and vehicle control. While this layered modular design is logically clear and easy to optimize separately, it requires extensive interfaces for data transmission between modules, increasing system complexity and vulnerability to error accumulation. When errors in environmental information detected by the perception module are transmitted to the planning module, the latter may make inaccurate decisions based on this erroneous information. End-to-End technology eliminates module boundaries by constructing a unified deep learning model, thus avoiding error propagation and simplifying the system architecture.
The core of End-to-End technology lies in "data-driven" and "unified modeling." Unlike traditional methods that rely on manually written rules or segmented optimization, End-to-End models are entirely dependent on data training. In autonomous driving, the system learns to handle complex driving scenarios, such as recognizing traffic lights, avoiding pedestrians, and managing intersection priority, through large-scale annotated data. The trained model can not only extract hidden high-level features from the data but also automatically optimize driving strategies for more intelligent operations. This method allows machines to learn human driver behavior patterns from driving data, ultimately generating driving control decisions that are more aligned with real-world scenarios, making autonomous driving more akin to experienced drivers.
At the implementation level, End-to-End technology typically employs deep neural networks as the core algorithm. These networks, including Convolutional Neural Networks (CNN) and Transformers, are used to process multimodal inputs such as images captured by cameras, LiDAR point cloud data, and vehicle dynamics information required for autonomous driving. By integrating these data, deep neural networks can make high-precision decisions in complex scenarios. For example, in a crowded urban road, the system needs to not only identify static obstacles like lane lines and traffic lights but also predict the trajectories of dynamic targets like pedestrians and vehicles in real-time. The End-to-End model swiftly generates driving decisions by directly processing these multimodal data, enhancing the system's response speed and real-time performance.
A notable feature of End-to-End technology is its global optimization capability. In traditional modular systems, the objective functions of each module may not align, with the perception module focusing on recognition accuracy, for instance, while the control module emphasizes driving stability. This inconsistency often leads to suboptimal system performance. In contrast, the End-to-End model optimizes the entire system globally through a unified training objective (such as driving safety or ride comfort), significantly improving overall performance. When confronted with sudden obstacles, the End-to-End model can quickly balance safety and driving smoothness to make timely emergency maneuvers.
Despite its great potential, End-to-End technology also faces numerous challenges. Model training requires massive amounts of high-quality annotated data, which is costly to obtain and involves complex scene coverage. The "black box" nature of deep neural networks also makes End-to-End technology less interpretable, making it difficult to meet some regulatory and safety requirements in practical applications. Additionally, End-to-End technology places high computational demands on in-vehicle hardware, posing new requirements for chip design and hardware architecture.
End-to-End technology is a revolutionary design concept that transcends the limitations of traditional modular systems, significantly enhancing the efficiency and performance of autonomous driving systems through deep learning's global optimization capabilities. With the growth of data scale, algorithm improvements, and the development of software-hardware integration, the application of End-to-End technology in autonomous driving will become increasingly widespread, offering more possibilities for future intelligent transportation.

How is End-to-End Technology Applied in Autonomous Driving?
The application of End-to-End technology in autonomous driving is primarily evident in critical aspects such as perception, decision-making, and control. By integrating these functional modules through a unified deep learning model, it eliminates the fragmentation of traditional systems, significantly enhancing system efficiency and adaptability. Under this technical architecture, the autonomous driving system can directly extract effective information from multi-sensor input data and quickly generate vehicle control commands, completing the entire process from "perceiving the world" to "making action decisions."
In the perception phase, End-to-End technology integrates multiple sensor data, such as visual information from cameras, point cloud data from LiDAR, and dynamic target information from millimeter-wave radar, to build a highly coordinated environmental perception capability. Unlike traditional single-sensor processing modes, End-to-End technology can uniformly analyze these multimodal data using deep learning models to extract more comprehensive and accurate environmental features. For example, through Transformer models or Bird's Eye View (BEV) networks, End-to-End technology can generate high-definition BEV views around the entire vehicle from data from multiple cameras. This multimodal fusion approach not only significantly improves the system's ability to recognize lane lines, obstacles, and dynamic targets but also enables the vehicle to handle complex scenarios more efficiently. For instance, in urban roads, when a pedestrian suddenly enters the vehicle's path, the End-to-End system can perceive this change in real-time and provide accurate input information for subsequent decision-making and control.
In the decision-making phase, End-to-End technology completely transforms traditional rule-driven approaches. Traditional systems often rely on manually designed logical rules and heuristic algorithms, which may perform inadequately in dynamic and complex traffic scenarios. In contrast, End-to-End models can autonomously learn the optimal decision paths for different driving scenarios through deep learning. For example, when a vehicle needs to make a left turn at an urban intersection, the End-to-End model can combine real-time perception data to dynamically assess the states of pedestrians, other vehicles, and traffic lights, and generate precise turning times and trajectory planning after comprehensively evaluating various factors. This data-driven learning approach makes the vehicle more adaptable in scenarios with high dynamism and uncertainty. Additionally, by training on a vast amount of real driving data, End-to-End technology can learn human driver behavior and experience, demonstrating human-like judgment capabilities in the decision-making process, making the driving experience smoother and more natural.
The control phase is the core component where End-to-End technology exerts its real-time advantages. In traditional systems, the control module is usually responsible for generating acceleration, braking, and steering commands based on the planning results from preceding modules. However, this approach has an obvious drawback: information transmission between preceding modules and the control module may introduce delays, affecting the vehicle's rapid response capability. End-to-End technology directly generates control commands through deep neural networks, bypassing the complex interactions of traditional modular systems. Tesla's Full Self-Driving (FSD) system employs End-to-End technology, enabling it to complete the entire process from environmental perception to action output at extremely high speeds when handling lane changes on highways or emergency braking in urban roads. Furthermore, some End-to-End models even deeply integrate control algorithms with deep learning architectures, making vehicle control more precise and stable. For example, during high-speed turns, the system can adjust the steering angle in real-time based on the vehicle speed and road curvature, ensuring vehicle stability and passenger comfort.
A prominent example highlights the difference between End-to-End and traditional modular systems. In urban driverless scenarios, vehicles need to simultaneously handle dynamic changes involving traffic lights, pedestrians, non-motorized vehicles, and other vehicles. Traditional modular systems typically rely on a series of complex rules and prior logic to manage these changes, while End-to-End technology, by learning from extensive scene data, can analyze this complex information in real-time and make precise driving decisions. These decisions are based on comprehensive perception and prediction of the entire scene rather than relying solely on a single factor.
By unifying modeling and global optimization, End-to-End technology tightly integrates perception, decision-making, and control, providing strong support for the efficient operation of autonomous driving systems. It not only enhances the system's real-time performance and accuracy but also demonstrates stronger adaptability in complex scenarios. With the continuous evolution of deep learning algorithms and the improvement of hardware computational power, the application of End-to-End technology in autonomous driving will become more in-depth, injecting new vitality into future intelligent transportation.

Software-Hardware Integration Boosts the Implementation of End-to-End Technology
The application and promotion of End-to-End technology cannot be divorced from robust hardware support, and the design concept of software-hardware integration is becoming a crucial driving force for its implementation. Software-hardware integration refers to the deep fusion of hardware and software, with both being collaboratively optimized from the design stage to maximize system efficiency, reduce power consumption, and improve operational stability. The rise of this concept in the field of autonomous driving not only provides a suitable platform for End-to-End technology but also lays the foundation for maximizing its performance.
In the realm of implementing End-to-End technology, the demand for computational power remains a pivotal concern. End-to-End models necessitate handling intricate deep learning tasks, ranging from multi-sensor data fusion to real-time inference of large-scale neural networks, each step placing substantial demands on the underlying hardware platform. Tesla stands as a prime example of how software-hardware integration empowers End-to-End technology. Its proprietary FSD chip is specifically tailored for autonomous driving tasks, leveraging deep hardware architecture optimization to reduce power consumption while enhancing computational efficiency. When processing End-to-End models, Tesla's chip minimizes the need for frequent data interaction inside and outside the chip by increasing on-chip cache capacity, thereby achieving higher computational speed and lower power consumption. This seamless integration of hardware and algorithms ensures the real-time performance and stability of End-to-End models.
Beyond Tesla, other industry leaders are also promoting the fusion of software-hardware integration and End-to-End technology. NVIDIA's latest Thor chip offers robust support for End-to-End model operations through a computational power optimization structure designed exclusively for deep learning models. Boasting up to 2000 TOPS (trillions of operations per second) of computational power and supporting multi-task parallel processing, the Thor chip can simultaneously address perception, decision-making, and control tasks in autonomous driving. Furthermore, the chip is deeply optimized for advanced architectures such as Transformers, further boosting model inference efficiency. This hardware architecture, tailored to meet the needs of End-to-End technology, underscores the propelling force of software-hardware integration for technology implementation.
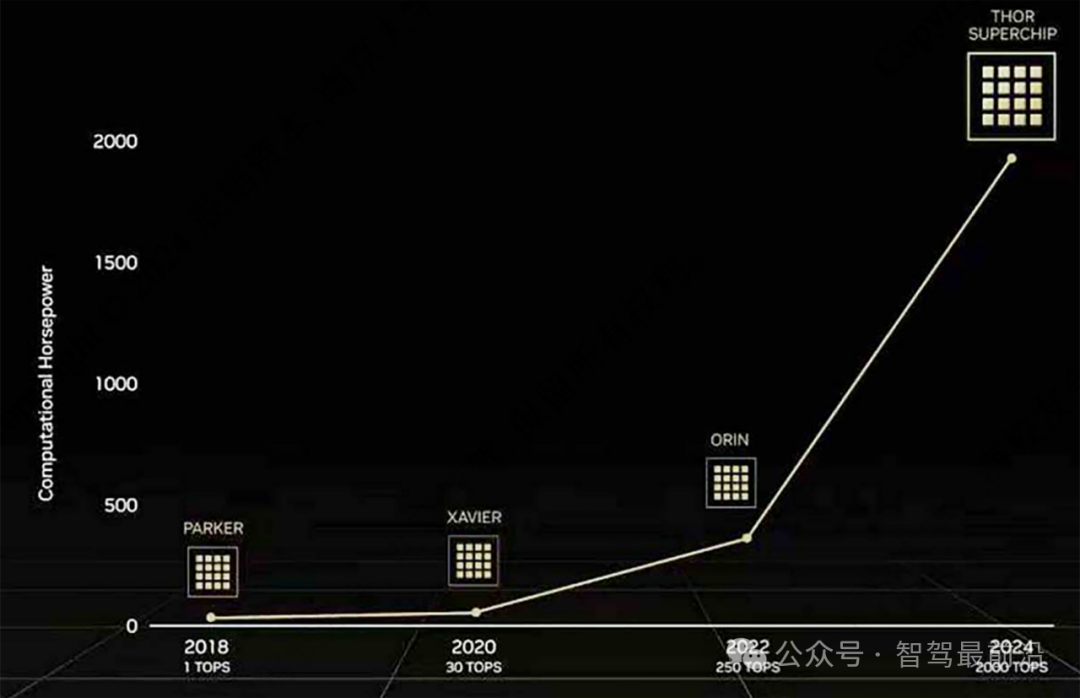
NVIDIA's latest Thor chip offers up to nearly 2000 TOPS of computational power.
Soft-hard integration not only amplifies the performance feasibility of end-to-end technology but also plays a crucial role in cost optimization. Compared to traditional general-purpose hardware, dedicated hardware with soft-hard integration can markedly reduce chip complexity and production costs through customized optimization for specific tasks. It also facilitates data processing and algorithm iteration in end-to-end technology. Horizon Robotics' J6 chip, through its highly integrated design, optimizes the allocation of computing units and memory bandwidth, enabling it to excel when running end-to-end models. Particularly in handling real-time data streams and responding swiftly to dynamic scenarios, the optimized soft-hard integration design effectively circumvents delays caused by uneven computing power allocation in traditional hardware. Meanwhile, this design better supports the iterative upgrading of end-to-end models. With the rapid evolution of deep learning algorithms, hardware platforms must possess greater adaptability, and soft-hard integration enables new algorithms to be swiftly adapted and deployed by proactively planning for algorithm requirements at the hardware level.
In China, Huawei, through its ADS (Autonomous Driving System) solution, comprehensively integrates self-developed chips, operating systems, and autonomous driving algorithms. Under this system, Huawei has designed the Da Vinci architecture to cater to the needs of end-to-end models, making its chips leading in matrix operation efficiency. This design philosophy of deep soft-hard collaboration not only drastically shortens the system development and deployment cycle but also fosters the application of end-to-end technology in real-world scenarios such as urban roads and Robotaxis.
Soft-hard integration is emerging as a pivotal factor driving the transition of end-to-end technology from the laboratory to real-world applications. By closely aligning hardware performance with software requirements, it not only boosts system computational power, efficiency, and stability but also lowers application costs, providing a solid foundation for the large-scale deployment of end-to-end technology. As soft-hard integration technology matures, end-to-end technology will exhibit stronger vitality in the autonomous driving domain, propelling the industry towards a more efficient and intelligent future.

Challenges and Future: The Next Stop for End-to-End Technology
While end-to-end technology holds the potential to revolutionize traditional autonomous driving architectures, it confronts numerous challenges in practical applications. These challenges stem from both the technology's intrinsic limitations and external factors such as industry ecosystems, hardware compatibility, and safety regulations. To truly achieve large-scale deployment and become the industry norm, end-to-end technology must address several key issues.
One major bottleneck for end-to-end technology development is its reliance on data. Training end-to-end models necessitates large-scale, high-quality labeled data encompassing various complex driving scenarios like rainy or snowy weather, night driving, and congested roads. However, collecting data from rare or extreme scenarios is often challenging, leading to potential model performance degradation in these conditions. Moreover, data labeling is a complex and costly task. In autonomous driving systems, labeling involves not only marking obstacles and lane lines but also predicting behavioral intentions and modeling dynamic relationships in complex scenarios, demanding higher data quality. If the issues of insufficient data scale and quality remain unresolved, the reliability of end-to-end technology in handling long-tail scenarios will be hard to guarantee.
Another significant challenge is the interpretability of end-to-end technology. Unlike traditional modular systems, the decision-making process of end-to-end models is a highly nonlinear and difficult-to-trace "black box." In deep learning models, input data passes through multiple neural network layers before outputting control commands, and the intermediate processing steps are often challenging to directly interpret. This characteristic poses severe challenges to safety and regulation. In accident analysis or liability determination, if the specific reasons behind a model's decision cannot be clarified, it significantly impacts public and regulatory trust in the technology. Furthermore, in safety-critical scenarios like emergency avoidance on highways, regulatory authorities may need to understand the basis for a model's decision to assess whether it meets predetermined safety standards. Therefore, enhancing the interpretability and transparency of end-to-end technology while ensuring performance has become an urgent problem for the industry to solve.
The demand for hardware computational power is also a major hurdle for end-to-end technology. Current end-to-end models typically need to process large-scale deep neural networks and complete full-chain inference from perception to control in real-time, placing stringent demands on in-vehicle computing platforms. Although high-performance chips like NVIDIA's Thor and Tesla's FSD chip can already support the operation of end-to-end models on a certain scale, the requirements for computational power and energy consumption will further escalate as model complexity and application scenarios expand. Especially in more complex multimodal perception and multi-task coordination scenarios, end-to-end models may require larger neural networks and more computing resources. This poses a significant challenge to hardware development and also limits the adoption of end-to-end technology in low- to mid-range vehicles or electric vehicles due to cost and energy consumption concerns.
Despite these challenges, the future of end-to-end technology remains promising, with several clear development directions worth noting. The first is the introduction of multimodal large models. Multimodal models that integrate various data sources such as vision, LiDAR, millimeter-wave radar, and V2X communication will significantly enhance the system's perception capabilities in complex scenarios. Additionally, with the advancement of large language models, future end-to-end systems may achieve semantic understanding of traffic scenarios, providing more explanatory support for driving decisions. Such multimodal large models can not only bolster model generalization ability but also make end-to-end technology more adaptable to diverse driving needs.
The openness and collaboration of the industry ecosystem will also become a vital driving force for end-to-end technology development. Currently, the lack of unified software and hardware standards in the autonomous driving field leads to incompatibility between different companies' technology systems. In the future, by establishing open software and hardware standards and ecosystems, companies can more effectively share data, optimize algorithms, and rapidly adapt to hardware platforms. This collaborative model will reduce development costs and accelerate the industry-wide adoption of end-to-end technology. Moreover, regulatory support is crucial. By formulating clear regulations and standards to provide legal guarantees for the testing and application of end-to-end technology, the uncertainty in the technology promotion process can be effectively mitigated.
The deepening of soft-hard integration will also aid in the implementation of end-to-end technology. By designing more efficient hardware architectures and optimizing the operational efficiency of deep learning models, future end-to-end systems will achieve higher performance with lower energy consumption. Simultaneously, customized end-to-end solutions for low-cost vehicle models are expected to drive the technology's adoption on a larger scale. For instance, Xpeng Motors' self-developed "Turing" chip and BYD's exploration of low-computational-power chips in the low- to mid-range market are significant attempts towards the future popularization of end-to-end technology.
Xpeng Unveils Turing Chip
The future evolution of end-to-end technology will be a multi-dimensional collaborative process, requiring algorithmic and hardware breakthroughs, as well as support from the industry ecosystem and policy environment. Despite numerous challenges, the potential efficiency gains and architectural simplification advantages of end-to-end technology will undoubtedly continue to drive its advancement. We have reason to believe that end-to-end technology will play an increasingly crucial role in addressing complex scenarios, optimizing driving experiences, and enhancing safety, paving the way for the full realization of intelligent transportation.

End-to-End: Steering Towards a More Efficient Future
As a groundbreaking advancement in the field of autonomous driving, end-to-end technology is redefining the design of intelligent driving systems with its unique capabilities for architectural simplification and performance optimization. Through a unified deep learning model, end-to-end technology transcends the limitations of traditional modular systems, achieving full-chain optimization from perception to control. This innovative design not only enables autonomous driving systems to exhibit higher robustness and efficiency in complex scenarios but also opens up new horizons for the future development of intelligent transportation. End-to-end technology signifies not just a technical shift but a revolution towards intelligence and efficiency across the entire industry.
With the accelerated progression of the soft-hard integration trend, the implementation of end-to-end technology is becoming increasingly feasible. The advent of proprietary chips and dedicated hardware provides robust computational power support for deep learning model operations, and the continuous evolution of multimodal data fusion allows end-to-end systems to function more seamlessly in complex scenarios. End-to-end technology is not merely a technical means but also the future trajectory of intelligent driving development. It represents a disruption of traditional thinking, evolving autonomous driving from "modular collaboration" to "holistic intelligent decision-making" through global optimization. This not only augments the efficiency of autonomous driving but also introduces more possibilities for enhancing the driving experience.
Looking ahead, end-to-end technology is not just a technical breakthrough in autonomous driving; it is a pivotal force propelling the industry forward. Amidst continuous advancements in software and hardware technology, increasingly abundant data resources, and closer industry collaboration, end-to-end technology is poised to accelerate its transition from the laboratory to large-scale commercial applications. From intelligent connected vehicles to Robotaxis and future smart urban transportation, end-to-end technology will serve as the core engine connecting it all, guiding us towards a more efficient, intelligent, and green future transportation landscape.
-- END --
-
![]()
Hardware is the skeleton, AI is the soul, and data integrates the two
-
![]()
China’s AI Industry: A Unified Pivot Towards Monetization?
-
![]()
New Progress! Infineon Completes Acquisition of ams OSRAM's Non-Optical Sensor Business
-
![]()
35 Million Bet on an Optical Future! Tengjing Technology Makes a Move in AR
-
![]()
Why World Models Get Stuck on Construction Roads in Autonomous Driving Applications
-
Alibaba Initiates Cultural Transformation: Is Jack Ma Making a Strategic Comeback?
-
Tianfeng Heads to Hong Kong for IPO with RMB 3.8 Billion in Funds: Xingyu's Cross-Border Foray into Embodied AI Faces Uncertain Future
-
![]()
Mengshi Auto’s High-End Aspirations Dashed: Huawei Partnership Fails to Revive Sales, New Model’s Entry Price Dips Below 300,000 Yuan