What Does It Mean to Approve L3 Autonomous Driving on Roads?
 09/16 2025
09/16 2025
 826
826
Recently, a sentence in the 'Work Plan for Stabilizing Growth in the Automotive Industry (2025–2026)' issued by eight departments, including the Ministry of Industry and Information Technology, has drawn significant attention: 'Conditionally approve production access for L3 autonomous vehicle models.' While seemingly casual, this statement opens a controlled pathway for the future development of the autonomous driving industry. It acknowledges technological maturity while steadily advancing L3 autonomous driving under clear boundaries, rigorous verification, and supporting regulations, making it possible to transition from small-scale demonstrations to large-scale applications.

Eight Departments, Including MIIT, Issue Notice
Why the Policy 'Conditionally' Approves?
Why does the policy create an opening for L3 autonomous driving? From a policy perspective, the emphasis is on 'conditional' approval, meaning it does not simply 'liberalize' or 'ban' L3 autonomous driving but provides a controlled pathway for advancement. As long as certain technical and management conditions are met, regulatory authorities will allow manufacturers to release L3 vehicle models with corresponding capabilities to the market and permit their registration and road use. Why is this approach taken? The Intelligent Driving Frontier believes there are four primary objectives.
The first objective is to recognize that after years of research, development, and road testing, certain L3 functions have matured sufficiently to operate safely in controlled environments. Policy endorsement acknowledges the industry's research and development achievements.
The second objective is to overcome the limitations of keeping technology in the 'pilot' stage, which hinders the formation of economies of scale. Conditional production approval encourages more vehicles on the road, generating data, exposing issues, and driving the development of supporting infrastructure (insurance, road systems, legal frameworks), thereby accelerating industry maturity.
The third objective is to control risks and ensure steady progress. 'Conditional' emphasizes controllability, meaning it will not be indiscriminately released across all scenarios and regions. Instead, safety is ensured by limiting operational scope and enforcing technical and management requirements, achieving 'steady progress.' This is not a simple encouragement or a blanket approval but a gradual approach of 'pilot testing, scaling up, and exposing and resolving issues under supervision.'
The fourth objective is to maintain a safety bottom line (safety bottom line). Whether for unmanned delivery vehicles or L3 passenger cars, policy openness is predicated on safety and controllability. Only when driving and public safety are ensured does technological application and industrial exploration hold true value.
What Can and Cannot L3 Autonomous Driving Do?
Before clarifying what L3 autonomous driving can do, we must define its intended functions. According to 'Classification of Driving Automation for Motor Vehicles' (GB/T 40429-2021), L3 autonomous driving falls under 'conditional automation.' Within its explicitly defined Operational Design Domain (ODD)—such as specific road types, speed ranges, and weather conditions—the vehicle can complete all dynamic driving tasks, including environmental perception, precise localization, path planning, and lateral and longitudinal control, via automated systems without requiring continuous driver attention to the road.
 Comparison of Autonomous Driving Levels Across Standards
Comparison of Autonomous Driving Levels Across Standards
The key lies in the system's ability to recognize its own capability boundaries. If it encounters scenarios beyond its capabilities or system anomalies, it must promptly issue a clear and identifiable takeover request. Before the driver takes over, the system must implement controllable degradation measures to ensure safety. Achieving this requires reliable multi-modal perception and redundant hardware, precise localization and high-definition maps, scenario-based and fault-injected decision-making and control algorithms, driver state monitoring to ensure takeover capability, and complete auditable logs along with robust information security and OTA management. Only when these technologies and verification systems are in place does it truly meet the SAE's requirements for L3 conditional automation. To realize L3 autonomous driving, several critical points must be addressed.
Operational Design Domain (ODD): This defines the 'map' within which L3 can operate. The ODD must specify road types (e.g., highways, urban expressways), speed ranges, weather conditions (e.g., clear skies or good visibility), and requirements for lane markings and traffic signs. Beyond the ODD, the system cannot guarantee safe operation.
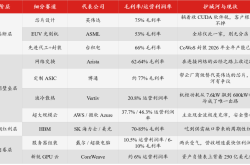
Perception and Localization: The vehicle needs to 'see clearly' and 'know its location.' In higher-level L3 and even L4 scenarios, relying solely on low-resolution or single-type sensors is insufficient to meet the requirements of 'seeing far without blind spots.' The system must detect small targets at long distances to allow more decision-making time while eliminating blind spots in the near field, especially on the sides and rear. Currently, the industry commonly integrates forward high-resolution LiDAR with dedicated solid-state blind-spot radars to form a comprehensive LiDAR perception system combining long-range detection and near-field blind-spot coverage. RoboSense exemplifies this with its mature solution: the EM4 series, a vehicle-grade digital forward LiDAR with resolutions exceeding 500 lines up to 2160 lines, provides high-resolution long-range perception. Paired with the E1 series, a vehicle-grade solid-state blind-spot radar, it eliminates near-field and side-rear blind spots. The EM4+E1 combination is reportedly the only high-level autonomous driving LiDAR configuration currently in mass production and delivery.
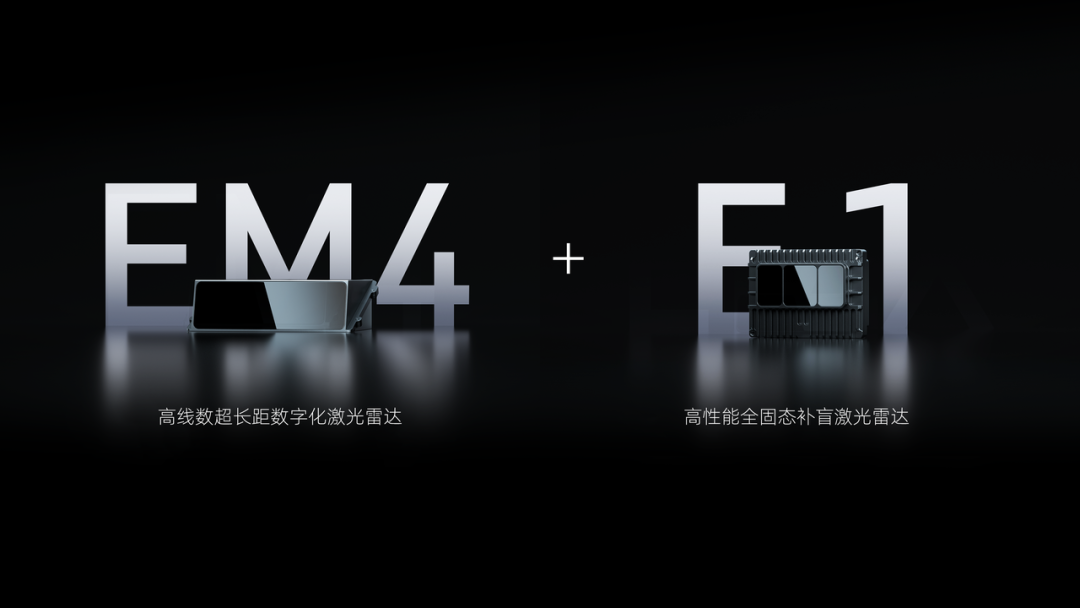 RoboSense EM4+E1 Combination
RoboSense EM4+E1 Combination
Decision-Making and Control: After perceiving road conditions, the system must make reasonable judgments (e.g., overtaking, lane merging, responding to sudden braking by the vehicle ahead) and execute them smoothly. Decisions must prioritize safety while ensuring passenger comfort, avoiding frequent alarming situations. Superior perception, planning, and control also require higher computational power from chips like NVIDIA Thor.
Human-Machine Interface (HMI): When the system encounters scenarios beyond its capabilities, it prompts the driver with a 'takeover request.' Design priorities include how and when to prompt the driver and what to do if the driver responds slowly.
Redundancy and Degradation Strategies: Critical components (e.g., braking, turn signals, key perception links) must have backup mechanisms. If a module fails, the system must safely degrade to a 'minimum risk state,' such as decelerating and pulling over to the roadside.
Of course, L3 autonomous driving is not all-weather or unconditional. In extreme or unknown scenarios like heavy rain, dense fog, complex construction zones, or sudden traffic accidents, the L3 system will immediately request human takeover or initiate safe parking measures. Therefore, L3 autonomous driving should never be treated as a 'fully automatic' or 'always road-free' system, as this would pose significant risks.
What Conditions Must L3 Autonomous Driving Meet?
To implement 'conditionally approve production access for L3 vehicle models,' several aspects must be addressed. The most critical is clearly defining boundaries. Manufacturers must specify the road segments, speed ranges, and weather conditions under which L3 autonomous driving functions can be activated, providing explicit scenario coverage data rather than vague claims like 'capable of handling most situations.' Support must be provided through data and testing results.
Redundancy and self-checking must also be in place. Key perception links and actuators must have redundancy to ensure safety in case of single-point failures. For example, if one camera or LiDAR fails, the system must continue operating or safely stop using another sensor or safety strategy. This requires LiDAR perception to have omnidirectional coverage comparable to cameras, meaning the primary LiDAR's pixel (line count) must match that of cameras, and full-body blind-spot radars must provide complete coverage to independently support the intelligent driving system. This configuration is seen in L3 architecture models like the Zeekr 9X and Zunjie S800.

Zunjie S800 Sensor Configuration
Additionally, the L3 autonomous driving system must have real-time self-checking capabilities to promptly trigger safety strategies upon detecting faults.
Before L3 autonomous driving is deployed, thorough testing and verification are essential. Relying solely on thousands of kilometers of road testing is insufficient to prove safety. Enterprises must conduct scenario-based testing, simulation testing, fault injection testing (deliberately creating issues to observe system responses), edge scenario validation, and provide coverage rates and results for these tests. Traceable testing records must be maintained.
Driver Monitoring System (DMS) and takeover strategies must also be clearly defined. L3 autonomous driving requires the driver to be in a backup position and capable of swift takeover when necessary. Manufacturers must equip vehicles with driver state monitoring systems (to detect distractions like phone use or drowsiness) and design reasonable takeover prompts and redundant takeover paths to avoid safety hazards from failed takeovers.
For autonomous vehicles, data recording of critical sensor data, decision-making processes, takeover requests, and driver responses must be auditable to facilitate accident investigation. Simultaneously, data privacy and transmission security must be ensured to prevent misuse or leaks.
Information security and OTA management must also be robust. Autonomous vehicles require regular software updates, necessitating a secure OTA mechanism to prevent hacking. Additionally, software development processes, vulnerability management, and patch strategies must adhere to clear norms.
Emergency response and operational support are indispensable for L3 vehicles to operate safely. Production access is just the starting point. Vehicles may encounter system failures, extreme weather, sudden accidents, or failed driver takeovers during actual operation, requiring comprehensive emergency plans to ensure safety. The system must trigger safe parking when risks arise, synchronously upload abnormal information to the backend, and automatically activate roadside assistance when necessary to prevent issues from escalating. To mitigate cascading effects from accidents, a rapid rescue mechanism must be established, enabling enterprises or partnered rescue teams to reach the scene promptly and take action. This relies on real-time data sharing between the vehicle and platform to transmit location, status, and fault information promptly.
Meeting these conditions requires close collaboration among automakers, autonomous driving suppliers, cloud service providers, map providers, and local regulatory authorities. The policy's requirements extend beyond technology, demanding organizational, institutional, and ecological alignment.
What Changes Will L3 Autonomous Driving Bring?
When L3 autonomous driving enters more vehicles and is used by more people under 'conditional' approval, it will bring a series of changes at both the individual and industrial levels.
For ordinary vehicle owners and passengers, the most noticeable change will be an improved travel experience. Compared to L2 autonomous driving, L3 can take over driving tasks on highways, long-distance routes, and congested urban arterials, allowing drivers to disengage and reduce fatigue. Additionally, the widespread adoption of L3 autonomous driving will foster new user habits and potentially create dependencies. Drivers must understand the boundaries between L3 and L2, learn to take over calmly when prompted, and ensure they are in a takeover-ready state. From the perspective of intelligent driving systems, higher-performance LiDAR and computational power will better handle boundary scenarios and ensure safety.
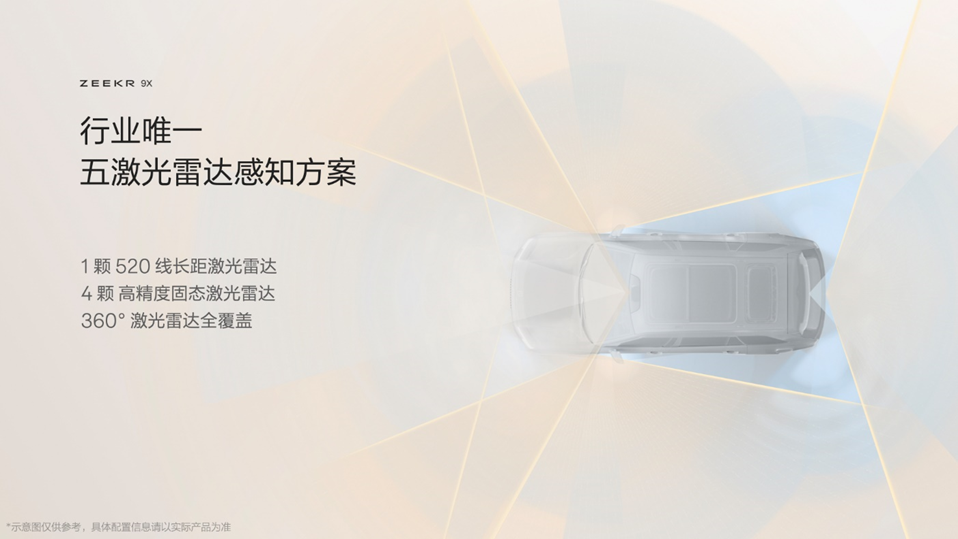
Zeekr 9X LiDAR Configuration
For automakers, competition in the L3 era will focus not only on safety but also on differentiating the user experience. The ability to let drivers disengage and shift liability will cultivate genuine demand for 'intelligent driving' among users, potentially triggering a market transformation similar to that from feature phones to smartphones. Differences in L3 autonomous driving experiences will become key determinants of product sales. Critical configurations like intelligent driving chip computational power, LiDAR line counts, and quantities will not only influence sales but also shape future intelligent driving upgrade potential and brand reputation.
For the insurance industry, this represents a transformative opportunity. The traditional 'human-liable' logic will be disrupted, with the liability chain evolving into a multi-party composite involving 'humans, vehicles, manufacturers, operators, and service providers.' Insurance products must innovate to cover new risks like system failures, software defects, and cloud service anomalies. Accident liability determination will increasingly rely on vehicle black box data and log records. Insurers may collaborate deeply with manufacturers to implement dynamic pricing or risk control based on real-world operational data.
For urban and road management, adjustments will be necessary. High-quality road markings and consistent map services will become more critical. Cities may initially open specific road segments or time slots to L3 autonomous vehicles for pilot testing before expanding. This approach ensures safety while allowing all stakeholders to accumulate experience. Additionally, traffic management, emergency response, and road authorities must establish supporting regulations to clarify compliance, inspection, and accident handling procedures.
Final Thoughts
The policy's proposal to 'conditionally approve production access for L3 vehicle models' serves as both an encouragement for technological advancement and a reaffirmation of safety and governance priorities. It conveys two key messages: first, certain autonomous driving capabilities, such as high-computational-power chips and high-performance LiDAR, are now ready for industrialization; second, any large-scale deployment must be built on clear boundaries, thorough testing, and comprehensive supporting infrastructure.
The path to autonomous driving will not be immediate. L3 autonomous driving represents a crucial bridge between assisted driving and higher levels of autonomy. As long as technologists ensure their capabilities are verifiable, traceable, and auditable, and regulators refine rules with precision, while urban and insurance sectors keep pace, ordinary users learn to utilize the technology appropriately, this path will grow steadier, ultimately delivering safer and more relaxed travel experiences.
-- END --
-
![]()
Step's Apple Dream
-
![]()
The value of AI Coding is quietly shifting from 'whose model is stronger' to 'whose toolchain is denser'.
-
![]()
AI Toys Soar: Trend or Just Hype?
-
![]()
High-Profile Corporate Feud! Apple Sues OpenAI
-
![]()
A Trillion Dollars Poured into AI: Only These Three Types of Companies Are Truly Profiting
-
![]()
Differentiation and Acceleration in Banking AI Implementation
-
![]()
Year’s First Half Sees Nearly 1.81 Million Vehicles Sold, with Exports Contributing Over 40%: How Will BYD Steer Through the Second Half Amidst a Price War?
-
![]()
Chuenergy’s Maiden ET Vehicle Rolls Off Line at SAIC-GM Wuhan South Plant, Poised to Rival AITO M5