Autonomous Driving Pioneer Thrun Predicts: Pure Vision Route to Dominate by 2026, Aerial Robots Set to Become Next Big Market
 11/24 2025
11/24 2025
 606
606
At Morgan Stanley's 24th Asia-Pacific Summit, Sebastian Thrun, a luminary in the field of autonomous driving, engaged in a comprehensive discussion with esteemed analyst Adam Jonas. The conversation delved into various aspects, including the technical approaches to autonomous driving, the current stage of the industry, the differentiation within the robotics sector, and the early, clandestine history of Waymo.

As the visionary behind Google's self-driving car project (the forerunner to Waymo) and a former director of Stanford's Artificial Intelligence Laboratory, Thrun's insights serve as a vital reference point for the ongoing development of autonomous driving and robotics.
The Technical Route Battle in Autonomous Driving: The "Cost Revolution" of Pure Vision Solutions
During the dialogue, Thrun explicitly highlighted that the most fundamental technical divergence in the autonomous driving sphere currently revolves around the strategic competition between the "pure vision" and "multi-sensor fusion" routes. He specifically underscored that Tesla's real-world testing of its pure vision FSD (Full Self-Driving) system in Austin will mark a pivotal turning point for the industry.
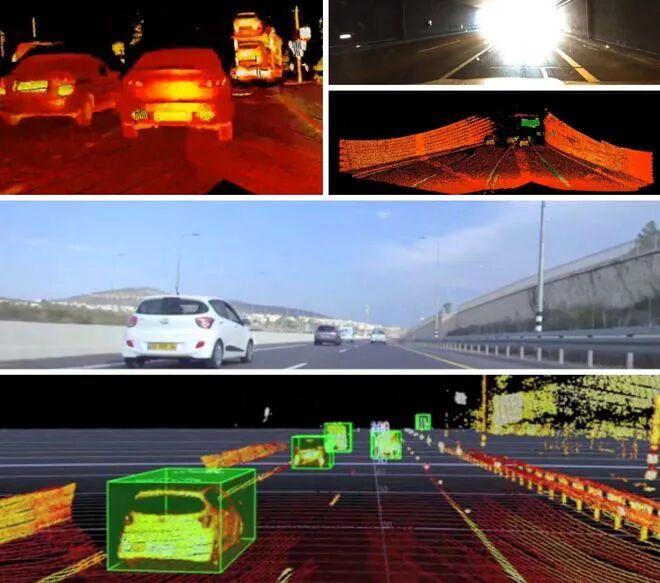
"If Musk can successfully operate purely vision-based Robotaxis commercially in Austin without safety drivers, it will represent a true paradigm shift," Thrun stated. From a technical standpoint, the pure vision solution relies solely on cameras, leveraging neural networks to mimic the visual perception systems of human drivers. In contrast, the multi-sensor fusion solution integrates LiDAR, millimeter-wave radar, and cameras to construct a multi-layered environmental perception system.
The core distinction between these technical routes lies in their perception architectures.
From an economic perspective, the primary advantage of the pure vision solution is its cost-effectiveness. Currently, high-end LiDAR units can cost thousands of dollars each, whereas cameras are priced at just tens of dollars. Thrun calculated that once the pure vision solution is proven safe and feasible, its cost advantage will pose a significant threat to the multi-sensor fusion route, akin to a "dimensional reduction attack."
However, the pure vision solution faces substantial technical challenges, particularly in terms of reliability under adverse weather conditions and low-light environments. Thrun explained, "The essence of a pure vision system is to compensate for the deficiencies of physical sensors through AI. This necessitates models with robust reasoning capabilities, capable of inferring complete environmental states from limited visual information."
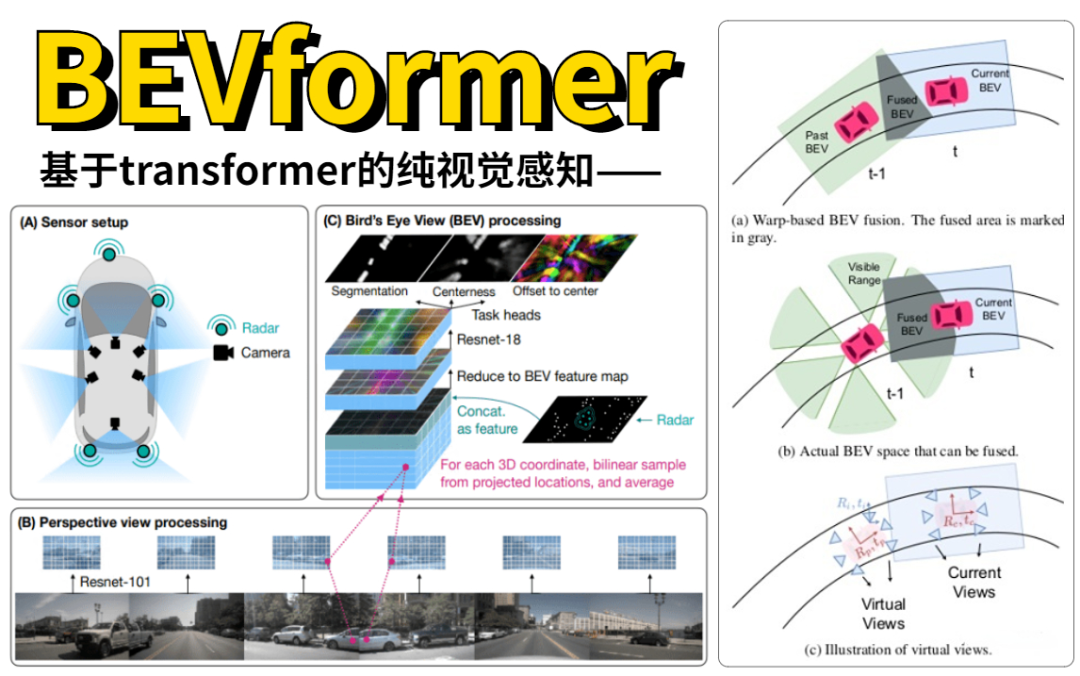
Tesla's adoption of the "BEV + Transformer" architecture exemplifies this approach. This architecture converts data from multiple cameras into a bird's-eye view perspective and then achieves 3D environmental perception through spatiotemporal sequence modeling. In contrast, the multi-sensor fusion solution directly obtains 3D point cloud data through LiDAR, making its technical implementation more straightforward but keeping costs high.
From the "Wright Brothers Moment" to the Eve of Scaled Expansion
Thrun reflected on the development history of autonomous driving, considering the 2005 DARPA Grand Challenge as the industry's "Wright Brothers moment." At that time, the "Stanley" autonomous vehicle developed by his Stanford team successfully completed a desert track challenge, proving the feasibility of autonomous driving technology.
After nearly two decades of development, autonomous driving has entered a phase of accelerated penetration. Thrun revealed that among the 500 attendees at the summit, approximately one-third had already experienced autonomous vehicles, with the vast majority riding in Waymos. This data provides an intuitive reflection of the technology's civilianization process.
The industry is currently at a critical juncture, transitioning from Level 4 (L4) to Level 5 (L5) autonomy. According to Morgan Stanley research, humans spend 82 million years annually in cars, indicating that the liberation of "driving time" through autonomous driving implies enormous economic value. Thrun predicted that the next 3-5 years will be the golden period for commercializing autonomous driving.
Waymo's latest expansion plans corroborate this judgment. The company announced it would begin manually driven testing in Minneapolis, New Orleans, and Tampa, with plans to expand driverless services to 15 cities by 2026, including Dallas, Houston, and Miami. Waymo has also started offering highway autonomous driving services, an important indicator of improved technological maturity.

Meanwhile, Amazon-owned Zoox is also accelerating its layout, beginning to offer free robotaxi services in San Francisco, directly competing with Waymo. Tesla has obtained a ride-hailing license in Arizona, clearing the final regulatory hurdle for launching its Robotaxi service.

Thrun believes the autonomous driving industry has moved past the technical verification phase and entered a phase of scaled expansion. However, he also emphasized that adaptability under different geographical and climatic conditions remains a technical challenge. Waymo's decision to test in cold cities like Minneapolis aims precisely to verify the system's reliability under harsh weather conditions.
The Paradox of Humanoid Robots and the Potential of Aerial Robots
In the robotics field, Thrun proposed a viewpoint of "structural differentiation," offering a sobering reflection for an overheated market.
Regarding humanoid robots, Thrun remains cautious. He believes the market has overly optimistic expectations about the "total addressable market size for replacing human labor" while severely underestimating the difficulty of technological implementation. "Having robots perform open-ended tasks and achieve hand dexterity represents an extremely complex engineering challenge," Thrun pointed out.
The core technical bottlenecks faced by humanoid robots include balance control in complex environments, fine manipulation capabilities, and adaptation to unstructured environments. Thrun suggested that investors should focus on companies addressing "fundamental challenges in physical interaction," such as those specializing in dexterous hand technology or environmental adaptive algorithms.
In contrast, Thrun is more optimistic about the development potential of aerial robots. "The future growth driver for robots will be in the sky, with aerial robots far outnumbering ground robots," he stated. He mentioned that the technology supporting aerial robots' "fully automated 3D space operations" has largely matured, with current primary limitations being infrastructure. Domestic company Mushroom Auto's AI network exemplifies expanding this concept to urban scales, constructing a real-world data bus through an "integrated sensing-communication-computation" architecture.
The core breakthrough of this network lies in achieving unified access and fusion of "real-world data." As Thrun emphasized, "infrastructure becomes the key bottleneck," Mushroom Auto realizes standardized processing of video frame extraction, data anonymization, and feature extraction through edge computing nodes, providing "one city, one day" rapid deployment capabilities for urban-scale implementations.

The existing U.S. air traffic control system cannot accommodate large-scale aerial robot operations, necessitating major upgrades. This creates investment opportunities in areas such as eVTOL (electric vertical takeoff and landing aircraft) development and air traffic management system upgrades.
From a technical architecture perspective, key issues that aerial robot systems need to address include:
• High-precision positioning and navigation
• Obstacle avoidance and path planning
• Swarm cooperative control
• Integration with existing air traffic control systems
Waymo's Early Moonshot Thinking and Team-Building Philosophy
Thrun disclosed for the first time detailed information about Waymo's early history and operational philosophy. Waymo originated as Google's internal "autonomous driving moonshot project," launched out of concern for traffic safety.
"At that time, traffic accidents caused over a million deaths globally each year, with human driving 'errors' being the primary cause," Thrun recalled. The project faced numerous early challenges: breakthroughs in environmental perception algorithms, vehicle hardware adaptation, and test permit applications. Through a "small steps, rapid iteration" model, the team gradually transformed "autonomous driving" from a "seemingly impossible idea" into reality.
Thrun particularly emphasized the core philosophy of team building. As a co-founder of Google X, he shared three principles for building great teams:
1. Members must have strong enthusiasm for "solving big problems": The essence of moonshot projects is targeting significant pain points that current technology cannot solve. Only those who identify with this goal can withstand long-term R&D pressures.
2. Encourage a "culture of trial and error": For innovation, "avoiding mistakes" is more dangerous than "pursuing correctness." Early-stage projects should allow for certain failures, with the key being to quickly extract lessons from them.
3. Emphasize interdisciplinary collaboration: Autonomous driving involves multiple fields such as computer vision, mechanical engineering, and policy research. Teams must break down disciplinary barriers to form a synergistic loop of "technology-engineering-policy."
Thrun also offered practical advice for "those wanting to undertake moonshot projects": Start by verifying ideas through "small-scale testing," using minimal costs to prove core logic feasibility before gradually scaling up, avoiding getting trapped in "large-scale investments without implementation" from the outset.
Waymo's technological development path exemplifies this thinking. The company adopted a gradual technological iteration route, progressing from closed campus testing to urban public road operations, accumulating practical data under different weather and road conditions to optimize algorithm environmental adaptability.
Waymo's Future Plans: A Long-Term Roadmap for Fully Autonomous Driving
Thrun elaborated on the company's long-term plans: The core objective remains achieving "fully autonomous driving in all scenarios without human intervention."
At the current stage, Waymo focuses on "expanding test regions and scenario coverage," accumulating practical data under different weather and road conditions from initial closed campus testing to urban public road operations. Regarding commercialization strategy, the company adopts a "small-scale pilot, gradual expansion" path while exploring B2B scenarios such as logistics transportation and campus shuttles.
Waymo One (autonomous ride-hailing service) will continue expanding, promoting autonomous driving from technological verification to sustainable commercialization through a dual-track model of "C-end experience verification and B-end profit realization." Technologically, Waymo continuously invests in AI algorithm optimization and vehicle hardware iteration. Particularly in perception systems, the company adopts a multi-modal fusion solution combining LiDAR, radar, and camera data to enhance system reliability under harsh weather conditions.
The Scaling Challenges of Robotaxis
Despite accelerated expansion by companies like Waymo and Zoox, Thrun believes the robotaxi industry has not yet reached the tipping point for transforming people's travel patterns. He pointed out that the arrival of this tipping point requires three key factors: geographical coverage, sufficient competition, and ecosystem spillover effects.
"Certain cities will carry more social weight than others," Thrun stated. Robotaxi saturation in densely populated cities on the East Coast and Midwest will serve as important indicators for the tipping point. Meanwhile, a healthy competitive environment is crucial for lowering prices and innovating business models. Ecosystem spillover effects also cannot be ignored. As robotaxis become widespread, they will spawn a series of related industries, including maintenance services, precision positioning, energy management, etc. For example, the centimeter-level precision positioning technology developed by startup Point One Navigation represents a component of the robotaxi ecosystem.
From a technological maturity perspective, challenges faced by robotaxis include:
• Navigation capabilities in complex urban environments
• Reliability under extreme weather conditions
• Interaction with other traffic participants
• Cybersecurity guarantees
Thrun predicted that within the next 3-5 years, as technology continues to mature and costs keep declining, robotaxis will achieve scaled commercialization in specific regions. However, to truly transform people's travel patterns, even longer technological iteration and market education will be needed.
With continuous breakthroughs in technology, commercialization, and policy by companies like Waymo, Zoox, and Tesla, autonomous driving is gradually moving from laboratories to reality. In the coming years, AI is transitioning from the "digital world" to the "physical world," from "perceptual intelligence" to "actionable intelligence." What we need to do is not predict the future but prepare for future infrastructure, technological routes, and business models.
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'
-
![]()
Zhipu's Trillion-Dollar Valuation: A New Chapter for China's AI
-
![]()
Is Laifen, a 'Dyson Alternative' on the Rise, Now Ensnared by the 'Alternative Curse'?
-
![]()
Beyond Patents: Insta360 and DJI Compete in Retail
-
![]()
Piercing Through Industry Chaos: The Curtain Rises on Compliance for Autonomous Driving






