In Autonomous Driving, What Functions Do Lateral and Longitudinal Control Modules Serve?
 04/07 2026
04/07 2026
 491
491
In the technical framework of autonomous driving, if we liken the perception system to the vehicle's eyes and the planning and decision-making processes to its brain, then the control module undoubtedly functions as the vehicle's "hands and feet." This module is tasked with converting driving instructions generated by the brain into precise physical actions, ensuring that the vehicle can accurately, smoothly, and safely navigate a predetermined path in the complex real world. The control module's operations can be divided into two core dimensions: longitudinal control and lateral control. Longitudinal control manages the vehicle's speed and the distance to the vehicle ahead, while lateral control dictates the steering angle of the wheels. These two dimensions are not independent; their close coordination at the execution level directly determines the driving quality and safety limits of autonomous vehicles.
The Role of Longitudinal Control
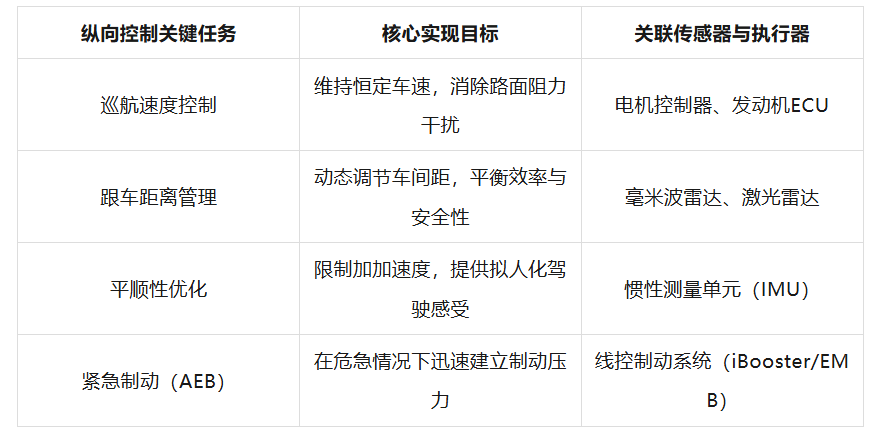
The fundamental task of longitudinal control is to achieve precise regulation of vehicle speed, encompassing the entire process from starting from a standstill, cruising, to emergency braking. In everyday autonomous driving scenarios, the longitudinal control module needs to receive the desired speed and acceleration from the planning layer in real-time and adjust the torque output of the drive system and the pressure distribution of the braking system through algorithms. To maintain stable following distances, the control system uses time headway (THW) and time to collision (TTC) as safety constraint indicators, ensuring a dynamic safety buffer between the host vehicle and the vehicle ahead.
The greatest challenge for longitudinal control lies in the nonlinearity of vehicle dynamics. Air resistance at various speeds, gravitational forces due to slopes, and even slight changes in tire pressure can all affect the vehicle's response to control instructions. To address this, modern control algorithms employ a strategy that combines feedforward and feedback control. Feedforward control calculates a theoretical driving force based on a pre-established vehicle dynamics model and the desired acceleration, while feedback control (typically using a Proportional-Integral-Derivative, or PID, algorithm and its variants) makes real-time adjustments based on the deviation between the actual and target speeds to eliminate errors caused by model inaccuracies. Additionally, to compensate for the physical response lag in the braking system, the control module introduces a delay compensation strategy, issuing pressure commands in advance through state prediction to shorten braking distances.
Ride comfort is another crucial consideration for longitudinal control. In autonomous driving, the key indicator for comfort is jerk, which refers to the rate of change of acceleration. If the acceleration commands output by the control module are too abrupt, passengers will experience noticeable jolts or "nodding" sensations. To mimic the driving style of experienced drivers, mainstream autonomous driving frameworks like Baidu Apollo incorporate nonlinear optimization algorithms into speed planning, achieving smooth power transitions by penalizing violent fluctuations in jerk. During braking, the system also coordinates with the Anti-lock Braking System (ABS) to strictly control tire slip rates at around 20%, ensuring maximum braking force while maintaining longitudinal stability.
The Role of Lateral Control
Lateral control is responsible for guiding the vehicle along a planned geometric path, essentially eliminating the deviation between the vehicle's current pose and the reference path. This deviation consists of two parts: lateral distance error and heading angle error. The lateral control module calculates the most appropriate steering command based on the current vehicle speed, heading, and position and sends it to the Electronic Power Steering (EPS) system. Throughout the evolution of algorithms, lateral control has transitioned from geometric to dynamic models to adapt to full-scenario demands, from low-speed parking environments to highways.
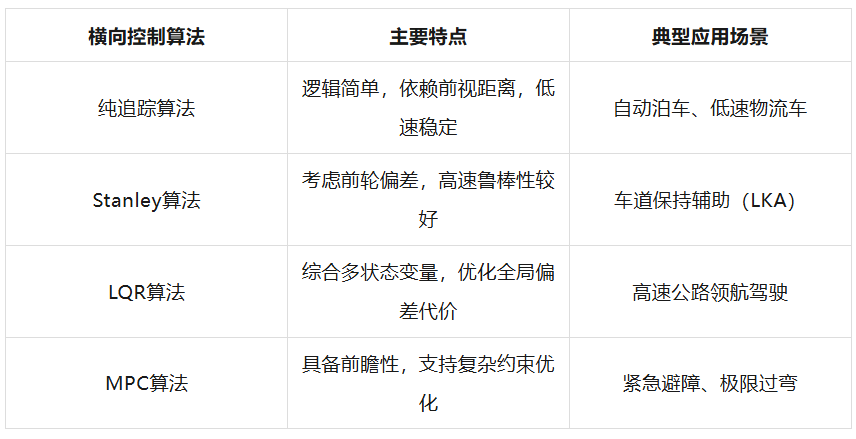
At low speeds, the vehicle can be simplified into a kinematic bicycle model, which assumes no sideslip and that steering is entirely determined by geometric relationships. The Pure Pursuit algorithm is a representative example, finding a look-ahead point on the reference path and calculating a circular path to achieve path following. However, as speed increases, the influence of tire lateral slip characteristics becomes non-negligible. At this point, the Stanley algorithm or control strategies based on two-degree-of-freedom dynamic models perform better, compensating for path deviations caused by centrifugal forces during high-speed cornering. For higher precision demands, Linear Quadratic Regulators (LQR) and Model Predictive Control (MPC) establish complex state-space equations to minimize not only current tracking errors but also steering energy consumption and future deviation trends.
The performance of lateral control is constrained by the physical characteristics of actuators. Factors such as the response frequency of the steering motor, friction in the steering column, and measurement jitter in sensors can all cause high-frequency oscillations in the steering wheel during driving. To address these issues, the control module needs to introduce a highly deterministic time synchronization protocol, controlling instruction execution jitter at the microsecond level. Simultaneously, the algorithm must estimate the road surface adhesion coefficient, actively reducing steering gain on wet or icy roads to prevent sideslip and loss of control. In autonomous driving systems, lateral control is no longer about mechanically following lines but dynamically adjusting steering "compliance" based on environmental curvature changes to provide robust tracking in corners.
Lateral-Longitudinal Coupling and Chassis Execution Redundancy at Physical Limits
In real-world traffic scenarios, a vehicle's lateral and longitudinal motions are interconnected through the frictional forces between the tires and the ground. According to the friction circle theory, the total adhesion force a tire can provide is constant, meaning that if the longitudinal driving force occupies too much grip, the lateral force available for steering will decrease accordingly. Therefore, advanced autonomous driving control modules must possess lateral-longitudinal coupling control capabilities. For instance, when entering a high-curvature bend at high speed, the control system needs to actively reduce longitudinal speed to leave sufficient adhesion force margin for lateral steering, preventing the vehicle from deviating from its trajectory due to understeer. This coupling is reflected not only at the algorithmic level but also in the multidimensional trajectory information passed from the planning module to the control module, which includes coordinates, heading, speed, and desired curvature at each time point.
Drive-by-wire chassis technology (X-by-Wire) is the material foundation for implementing these complex control strategies. Steer-by-wire (SBW) and brake-by-wire (iBooster/EPB) systems replace traditional mechanical connections with electrical signal transmission, enabling the control module to directly intervene in chassis actions with faster response times. The steer-by-wire system can also dynamically adjust the steering ratio, reducing steering wheel turns at low speeds for maneuverability and increasing steering stability at high speeds. It can even provide more nuanced feedback to the algorithm by simulating steering return forces. To ensure fault tolerance at the execution level, the drive-by-wire chassis is equipped with redundant controllers and power supplies. In autonomous driving systems meeting L3 or higher standards, the system must satisfy extremely low failure rate requirements (e.g., the FIT10 standard), allowing only a minimal probability of failure over extended operation periods.
Final Thoughts
As autonomous driving technology advances, autonomous driving control modules are evolving toward greater integration and anthropomorphism. The emergence of chassis domain controllers will deeply integrate lateral, longitudinal, and vertical control (active suspension), optimizing vehicle posture in real-time through a unified computing platform. Data-driven methods are also being introduced into the control domain, enabling autonomous vehicles to exhibit more composed and natural driving styles in extreme conditions by learning from human drivers' handling of complex road scenarios.
-- END --
-
How Meituan is Becoming the 'Interface' for AI Integration into the Physical World
-
![]()
RoboScience Machine Science Makes ICRA Best Paper List for Two Years Running with Its 'Embodied Brain' Innovation
-
![]()
Focusing on UTG Ultra-Thin Flexible Glass! CSG Optical New Material Production Base Establishes in Xianning, Hubei
-
![]()
AI Meets Optics: Tsinghua Smart Vision Secures A+ Round Funding Led by Hillhouse Capital
-
![]()
Why are 3C Brands Flocking to Douyin Mall During 618?
-
![]()
Token Economy Falters as Economic Tokenization Faces Challenges
-
![]()
Lenovo's Monthly Surge of 109%, Foxconn Industrial Internet's Market Cap Surpasses Kweichow Moutai: A Collective Resurgence of the 'IT Old Guard'?
-
![]()
After Zhang Xue's Victory, Where is Motorcycle Intelligence Headed?






