Why is Simulation Pivotal for Autonomous Driving?
 05/23 2025
05/23 2025
 522
522
Autonomous driving simulation stands as an indispensable element within the current research, development, and verification framework for autonomous driving technology. It constructs virtual road scenarios, vehicle dynamics models, and sensor perception environments to rigorously evaluate and verify the functionality and safety of autonomous driving systems across a myriad of complex conditions. Compared to real-road testing, simulation offers substantial benefits including enhanced controllability, reduced costs, accelerated speed, and heightened safety, making it a strategic approach that leading automakers, Tier 1 suppliers, and startups are keenly investing in within the autonomous driving domain.

What is Autonomous Driving Simulation?
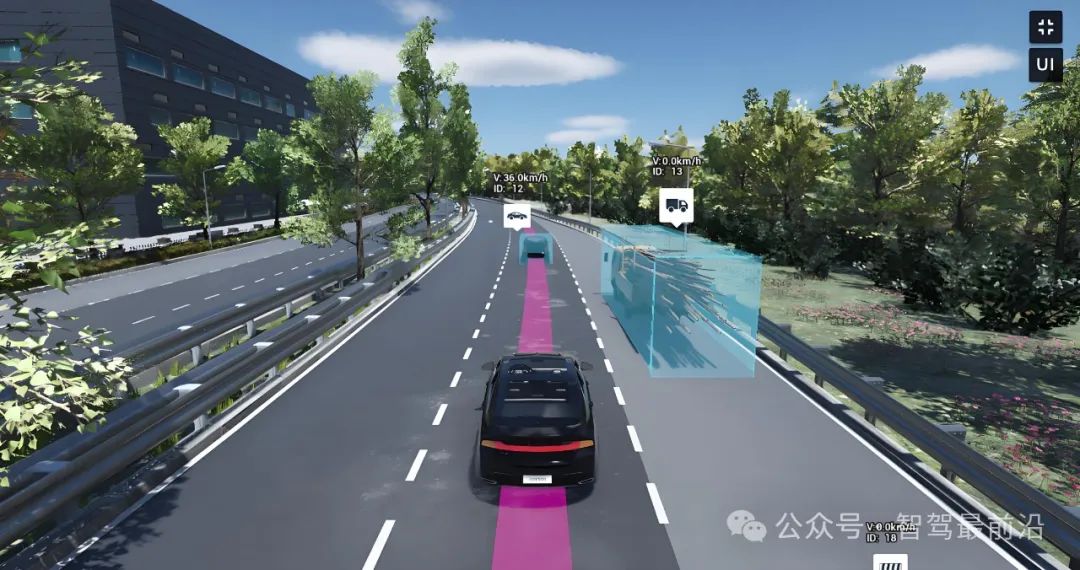
Before delving into the discussion, it's crucial to clarify what "autonomous driving simulation" entails. Broadly, simulation involves the digital recreation of real systems using computer models, replicating processes such as mechanical motion, sensor acquisition, decision-making, and control in the physical world through software algorithms. Autonomous driving simulation specifically targets autonomous vehicles, integrating road environments, traffic participants, vehicle chassis dynamics, sensor signals, and other elements into a simulated environment to form a comprehensive, multi-dimensional testing platform. Depending on the application scenario, autonomous driving simulation can be categorized into various modes such as pure virtual simulation, hardware-in-the-loop (HIL), software-in-the-loop (SIL), and scenario simulation, each playing a distinct role in the R&D process, collectively forming a comprehensive verification loop.
In the R&D lifecycle of autonomous driving systems, simulation technology spans all stages, including concept design, algorithm development, functional verification, safety assessment, regulatory compliance, and mass production validation. Early-stage concept validation often relies on low-cost, rapidly iterative virtual environments, leveraging simulation platforms to swiftly assess the performance of perception and decision-making algorithms under typical conditions. This is followed by the algorithm optimization and calibration stage, where synthetic scenarios are utilized to augment real-road test data. In the safety assessment stage, simulation conducts extensive Monte Carlo tests for extreme scenarios and high-risk conditions, alongside in-depth analysis of system failure modes. Finally, in regulatory compliance and mass production validation stages, the simulation system generates test cases aligned with local traffic regulations and accident statistical distributions, providing robust data support for test license applications and mass production approval.
Simulation's role as the "touchstone" of autonomous driving R&D is evident in several aspects. Firstly, cost-efficiency: real-road testing necessitates substantial investment in enclosed test sites, human resources, and maintenance, while each test covers limited scenarios. In contrast, simulation can run tens of thousands of tests in parallel on a single high-performance computing device, significantly reducing time and economic costs. Secondly, safety: certain extreme conditions pose high risks in real-world testing but can be safely replicated in a simulated environment. Thirdly, controllability and repeatability: simulation platforms precisely control scenario parameters, ensuring unique variable sets across experiments, thereby enhancing test result credibility. Fourthly, data scale and coverage: autonomous driving algorithms rely on extensive, diverse data, and simulation can generate, vary, and combine scenarios to cover massive boundary conditions and rare scenarios, which is challenging on real roads.

What Technologies are Required for Autonomous Driving Simulation?
Constructing a high-quality autonomous driving simulation platform necessitates the synergistic support of multiple core technologies. Physical dynamics simulation technology accurately models vehicle chassis, suspension, and tire models, replicating vehicle acceleration, braking, and steering responses under diverse road conditions, ensuring virtual vehicle behavior aligns closely with real-world behavior. Sensor simulation technology includes data stream simulation for cameras, LiDAR, millimeter-wave radars, ultrasonic radars, GNSS/IMU, etc., precisely replicating each sensor's noise characteristics, detection blind spots, and distortion mechanisms in various environments to ensure compatibility and robustness of upper-level perception algorithms across data types.
Environment and scenario simulation technology is another cornerstone. Leveraging high-definition maps (HD Maps) and geographic information system (GIS) data, the platform generates various road types like cities, villages, highways, tunnels, and bridges. Combined with meteorological models, time changes, traffic flow distributions, and other factors, it constructs all-weather, all-time, and multi-density traffic scenarios. Additionally, to meet algorithm training and verification requirements, scenario elements (pedestrians, vehicles, traffic signs, road facilities, etc.) must have rich and precise three-dimensional models and semantic labels.
Complementing environmental modeling are behavior models and scenario generation technologies. Traffic participant behavior is not random but follows traffic regulations and human driving habits. Advanced simulation platforms integrate behavior models based on statistical learning, game theory, or reinforcement learning, providing realistic simulations of dynamic scenarios like vehicle following, lane changing, intersection passing, and pedestrian crossing. Simultaneously, scenario generation tools programmatically construct tens of thousands of test cases by intelligently extracting and synthesizing real-road data, ensuring coverage of common and extremely rare conditions.

At the software architecture level, autonomous driving simulation platforms typically adopt a modular design, independently developing functional modules such as scenario management, physics engines, sensor simulation, decision execution, data acquisition, and visualization, facilitated by a unified middleware (e.g., ROS, DDS) or a self-developed message bus for data interaction. In SIL mode, the host computer runs decision-making and control software; in HIL mode, some or all vehicle hardware (ECU, sensors) is connected to the simulation platform to verify hardware interfaces and real-time performance. The combination of these modes ensures comprehensive verification of software and hardware collaboration stability and response time.
The simulation process generates vast amounts of data, including sensor point clouds, image frames, control commands, physical states, and log information, necessitating robust data management and post-processing. Efficient scenario libraries and test case management systems supporting version control, labeling, reproduction, and traceability are crucial. Additionally, automated test result evaluation leveraging risk indicators (e.g., collision rates, violation rates, control stability) and statistical analysis tools quantifies simulation results, providing swift feedback to algorithm and system engineering teams.

Current Status and Trends of Autonomous Driving Simulation
While autonomous driving simulation technology has made significant strides, challenges remain. The primary challenge is simulation credibility, known as the "Sim-to-Real Gap." To bridge this gap, continuous optimization of sensor models, environmental textures, and dynamic behavior models is essential. Secondly, efficiently generating and scheduling test cases for extreme and rare scenarios while avoiding resource wastage is an ongoing research area. As regulations on autonomous driving testing and road access become more stringent, simulation platforms must meet compliance standards across different countries and regions, necessitating substantial custom development.
Looking ahead, with decreasing computational costs, breakthroughs in AI algorithms, and the evolution of 5G/6G networks and vehicle-to-everything (V2X) technology, autonomous driving simulation technology will evolve in several directions. Firstly, towards higher-fidelity digital twins, enabling synchronous simulation and interaction between real and virtual vehicle fleets. Secondly, towards automatic scenario generation and automated evaluation powered by large models, realizing the "intelligent hub" effect of simulation platforms. Thirdly, towards a cloud-edge-end integrated collaborative architecture supporting flexible scheduling across diverse computing platforms. Lastly, towards full-lifecycle collaborative management of simulation and mass-produced vehicles, providing a solid foundation for autonomous driving commercialization.

Closing Remarks
In conclusion, autonomous driving simulation offers unparalleled advantages in cost, efficiency, safety, controllability, and data coverage, emerging as a core element in the R&D and verification of autonomous driving systems. By continually advancing technologies in physical simulation, sensor simulation, scenario generation, and data management, and envisioning high-fidelity digital twins and intelligent testing platforms for the future, simulation technology will play an increasingly pivotal role in supporting and leading the commercialization of autonomous driving.
-- END --
-
![]()
Market Share Dilemma: DJI vs. Insta360—Is It '40-40' or '60-30'?
-
![]()
Market Share Dilemma: DJI vs. Insta360 – A '40-40 Split' or '60-30 Split'?
-
![]()
It's Kunlunxin's Turn to Play
-
![]()
Is the New Performance Peak Just the Starting Point? What Will Be Crystal-Optech's Next Destination?
-
![]()
Goertek Pours 69 Million Yuan into Elite Precision: Ramping Up Optical Precision Manufacturing and R&D Capabilities
-
![]()
Avatr Attempts HKEX Listing Again, With 20,000 Vehicles Sold in First Five Months
-
![]()
NVIDIA Announces 10-Fold Production Capacity Increase in 2 Years, Disrupting the Energy Storage Industry
-
![]()
AI Enters the Second Half: Models Are No Longer Scarce, What’s Truly Scarce Are Computing Power, Scenarios, and Trust