Balancing Communication Efficiency with Control Energy Efficiency in Automotive Electronic Systems
 07/23 2025
07/23 2025
 757
757
Produced by Zhineng Zhixin
As automotive electrification and intelligence advance, modern body control networks are becoming increasingly intricate, with a surge in distributed ECUs across various functions, from mirrors and lighting to air conditioning systems. This evolution necessitates the parallel advancement of communication speed, EMC performance, load control, and low-power technologies.
We delve into achieving engineering excellence in reliability, efficiency, and regulatory compliance through technologies like CAN FD communication, EMC strategies, intelligent wake-up, integrated load drive, and system collaborative design.
Part 1: CAN FD Communication and EMC Challenges
Evolution from Bus Speed to Signal Integrity
The development of automotive body control networks is intertwined with the evolution of communication systems.
The transition from traditional CAN to CAN FD is a pivotal trend in the industry. By elevating the data rate to over 5 Mbps, CAN FD enhances ECU communication efficiency and bolsters support for sophisticated functions.
However, increased bandwidth introduces heightened risks to signal integrity, making reflections, ringing, and EMI issues more pronounced.
Particularly in complex star or long-branch topologies, impedance mismatches can cause reflections that corrupt data frames, exacerbate ringing, and even lead to system incompatibility or certification failures. Traditional CAN network design methods, reliant on intricate PCB routing and termination matching, are no longer adequate.
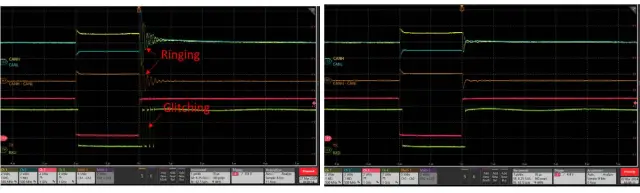
To address this, engineering has developed new transceiver technologies supporting signal enhancement and symmetry control, such as CAN SIC (Signal Improvement Capability). These maintain stable signal transmission at 8 Mbps and are compatible with existing CAN controllers.
Through built-in waveform shaping circuits, these devices actively suppress reflections at the physical layer, reducing signal stabilization time and EMI emissions.
These highly integrated solutions minimize reliance on complex common-mode inductors, optimizing BOM costs and board space while enhancing performance. They are well-suited for future high-integration communication scenarios under zonal architectures. Enhancing communication integrity must also consider EMC's system-level impact.
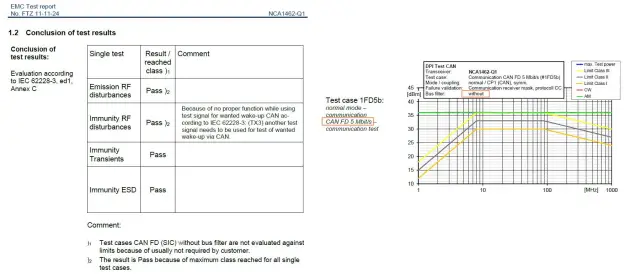
The automotive industry has stringent EMC compliance requirements, particularly under standards like IBEE, FTZ-Zwickau, and IEC 62228-3. Transient immunity, ESD tolerance, and radiation limits are crucial for transceiver design.
Some new-generation transceivers employ architectures that forgo common-mode inductors and pass DPI tests at 5 Mbps, demonstrating resilience to system-level interference.
Part 2: Low-Power Control and Intelligent Execution Unit Evolution
From Power Management to Drive Architecture
In electric vehicle architectures, energy consumption management is paramount. Especially in numerous body subsystems that remain inactive for extended periods, achieving low-power standby and on-demand wake-up is a critical power management challenge.
Traditional CAN network node wake-up relies on bus activity, often leading to frequent wake-ups across the network and increased static current consumption.
Modern systems are shifting towards a "selective wake-up" mechanism based on specific remote frames. This only wakes up the target ECU when matching CAN frames with specific IDs, significantly reducing unnecessary power consumption, ideal for subsystems like door control and lighting.
Selective wake-up functionality is typically implemented by CAN transceivers supporting low-power modes, enabling the system to maintain standby status at uA-level currents and discriminate wake-up commands through matching logic. This is compatible with existing CAN protocols without altering ECU control strategies.
This design allows electric vehicle platforms to significantly reduce standby power consumption without altering the communication protocol stack, meeting increasingly stringent energy consumption standards.
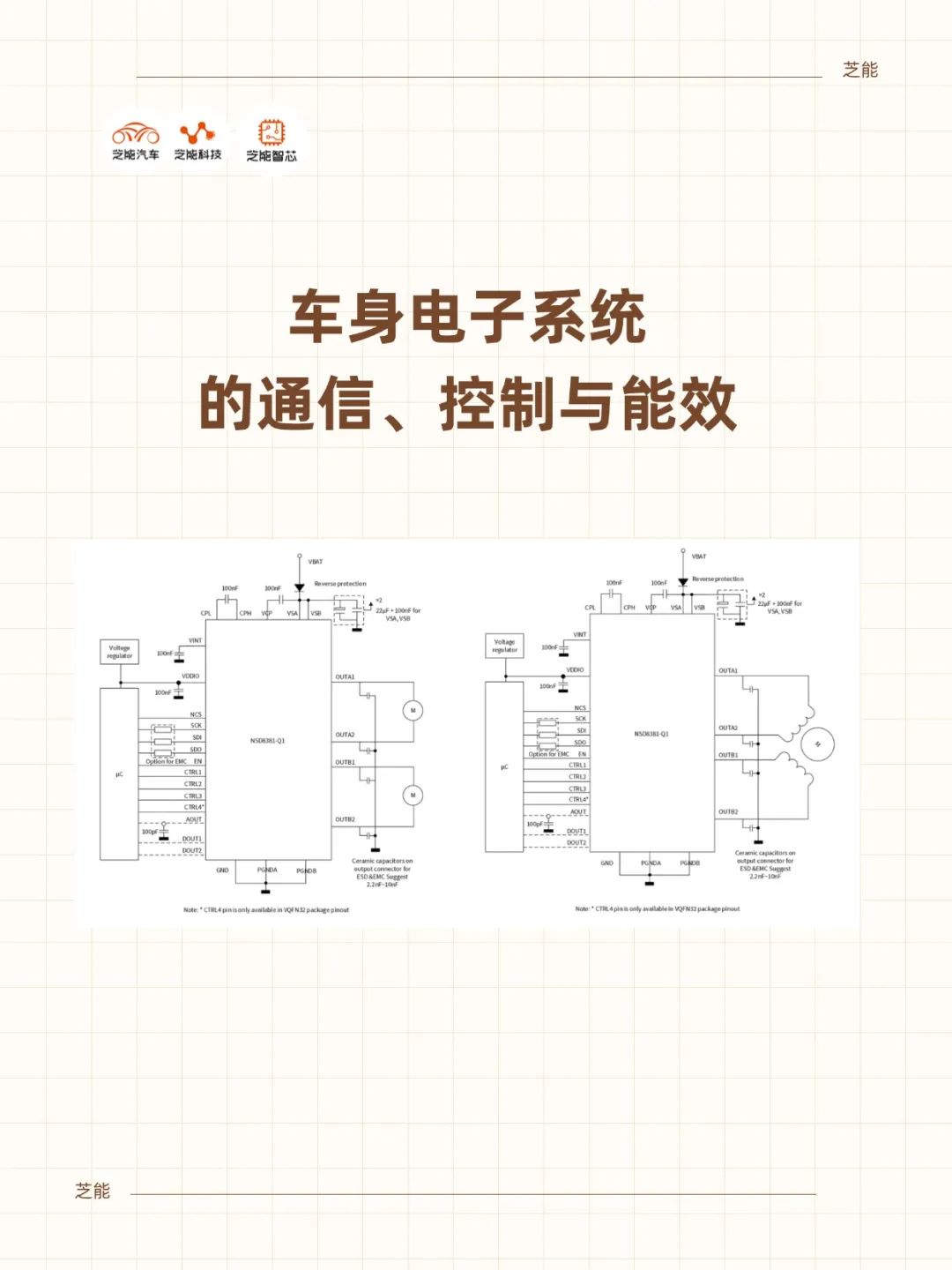
Meanwhile, physical layer control components have transitioned from discrete to integrated forms.
Modern high-end switch chips integrate load drive capabilities, current sensing, electrical protection, and fault diagnosis, supporting complex mixed loads like resistors, inductors, and capacitors. The core is an integrated feedback loop that dynamically monitors load status and executes shut-off or fault-tolerant responses in case of anomalies.
These intelligent high-side/low-side switches enhance system fault tolerance and offer greater flexibility in thermal design, space control, and redundancy configuration.
Another notable trend in body control is the integration of small motor drives.
Driven by the need for precise control and real-time monitoring in functions like seats, sunroofs, and HVAC regulation, there has been a shift from relays to fully integrated motor drives. These drives support micro-stepping control, stall detection, thermal protection, and other functions, communicating directly with standard MCUs. This enhances vehicle comfort and control accuracy while facilitating unified platform development.
Summary
With the growing prevalence of automotive zonal control architectures, single-point optimization is insufficient to address the multifaceted challenges of system complexity.
Communication, power supply, execution control, and energy consumption management are inherently intertwined subsystems that must be considered comprehensively from a systems engineering perspective.
When transceivers, switches, and drivers are designed as collaborative units, embedding fault detection, EMC protection, and power consumption optimization mechanisms, the system design cycle is significantly shortened, verification becomes more manageable, and platform versatility and safety redundancy are enhanced.
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'
-
![]()
Zhipu's Trillion-Dollar Valuation: A New Chapter for China's AI
-
![]()
Is Laifen, a 'Dyson Alternative' on the Rise, Now Ensnared by the 'Alternative Curse'?
-
![]()
Beyond Patents: Insta360 and DJI Compete in Retail
-
![]()
Piercing Through Industry Chaos: The Curtain Rises on Compliance for Autonomous Driving






