Network Connectivity for ADAS: A Strategy for Seamless Multi-WAN Integration
 05/07 2025
05/07 2025
 748
748
Produced by Zhineng Zhixin
The continuous evolution of Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD) technologies has placed unprecedented demands on vehicles for high-speed, low-latency, and constant network connections.
Despite advancements, real-world environments still present significant challenges, including inadequate network coverage, bandwidth limitations, and communication delays. These issues severely restrict the availability of critical functions such as remote control, remote diagnostics, Over-The-Air (OTA) updates, and Vehicle-to-Everything (V2X) communications.
In the document, "Overcoming Connectivity Challenges in ADAS/AD – Strategies for Seamless Multi-WAN Networks," we provide an in-depth analysis of the major connectivity challenges faced today, explore solutions centered on seamless multi-WAN switching, and introduce the pivotal role of the V2X communication architecture in the era of autonomous driving.
Our aim is to introduce novel considerations surrounding wireless systems.
Part 1: Connectivity Dilemma – The Bottleneck of ADAS Development
The heart of ADAS and autonomous driving systems lies in the synchronized coordination of perception, decision-making, and execution. This process necessitates a substantial amount of real-time data support and relies heavily on continuous, stable network connections.
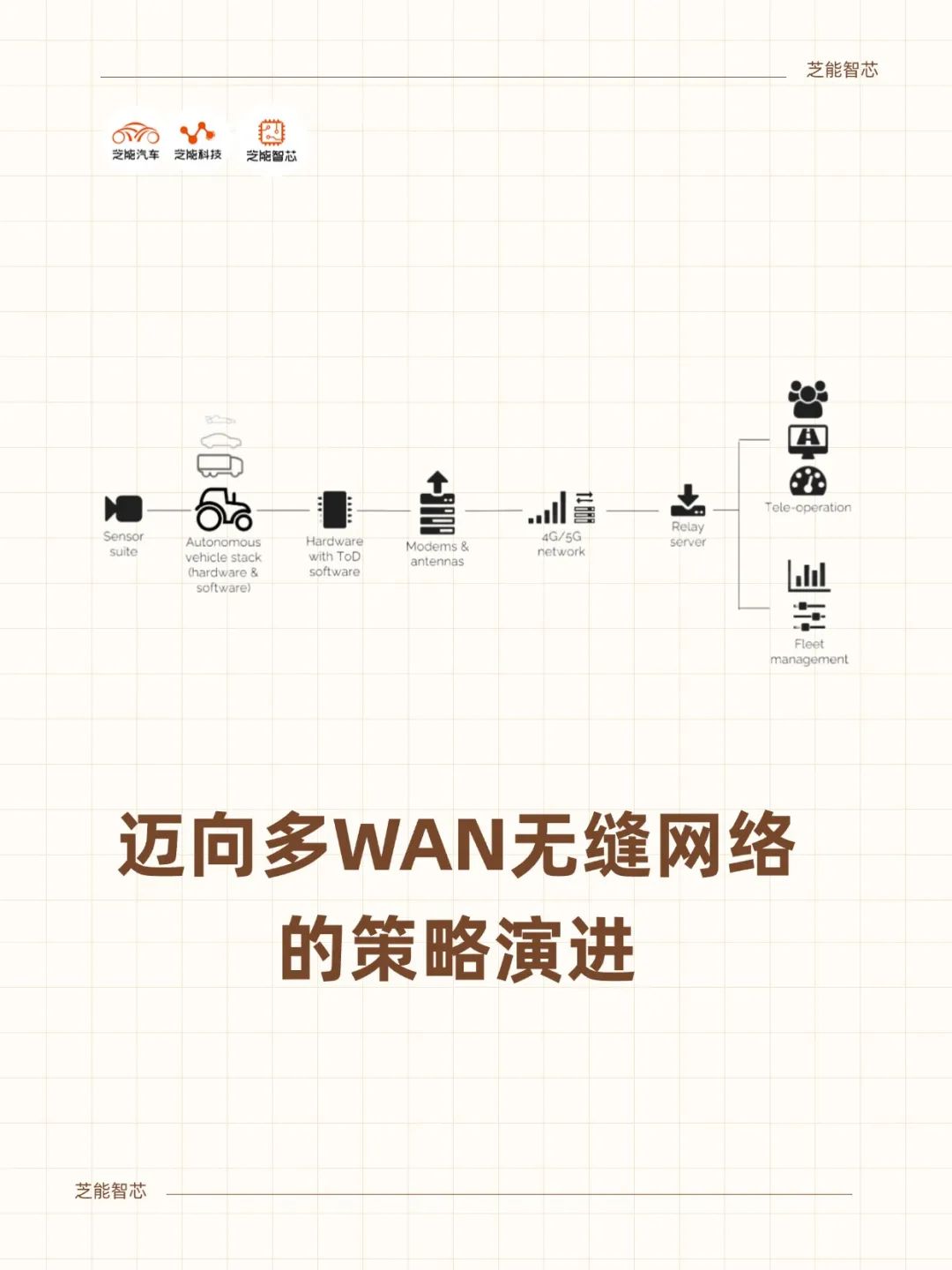
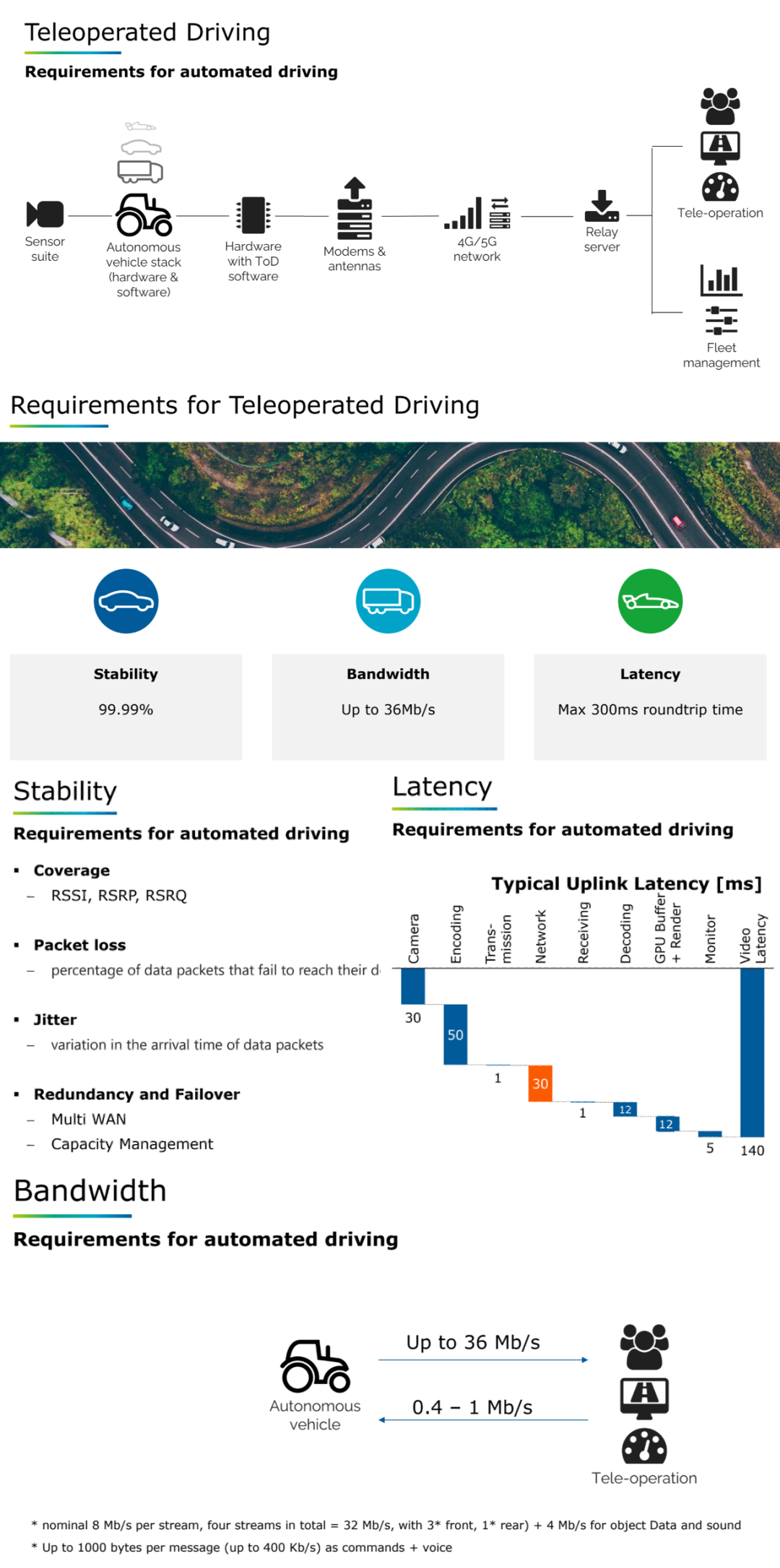
Take teleoperated driving as an example: information collected from onboard sensors is transmitted to the operation center, while control commands are simultaneously received and sent back to the vehicle. This entire process demands stringent communication latency requirements (typically not exceeding 300ms round-trip delay).
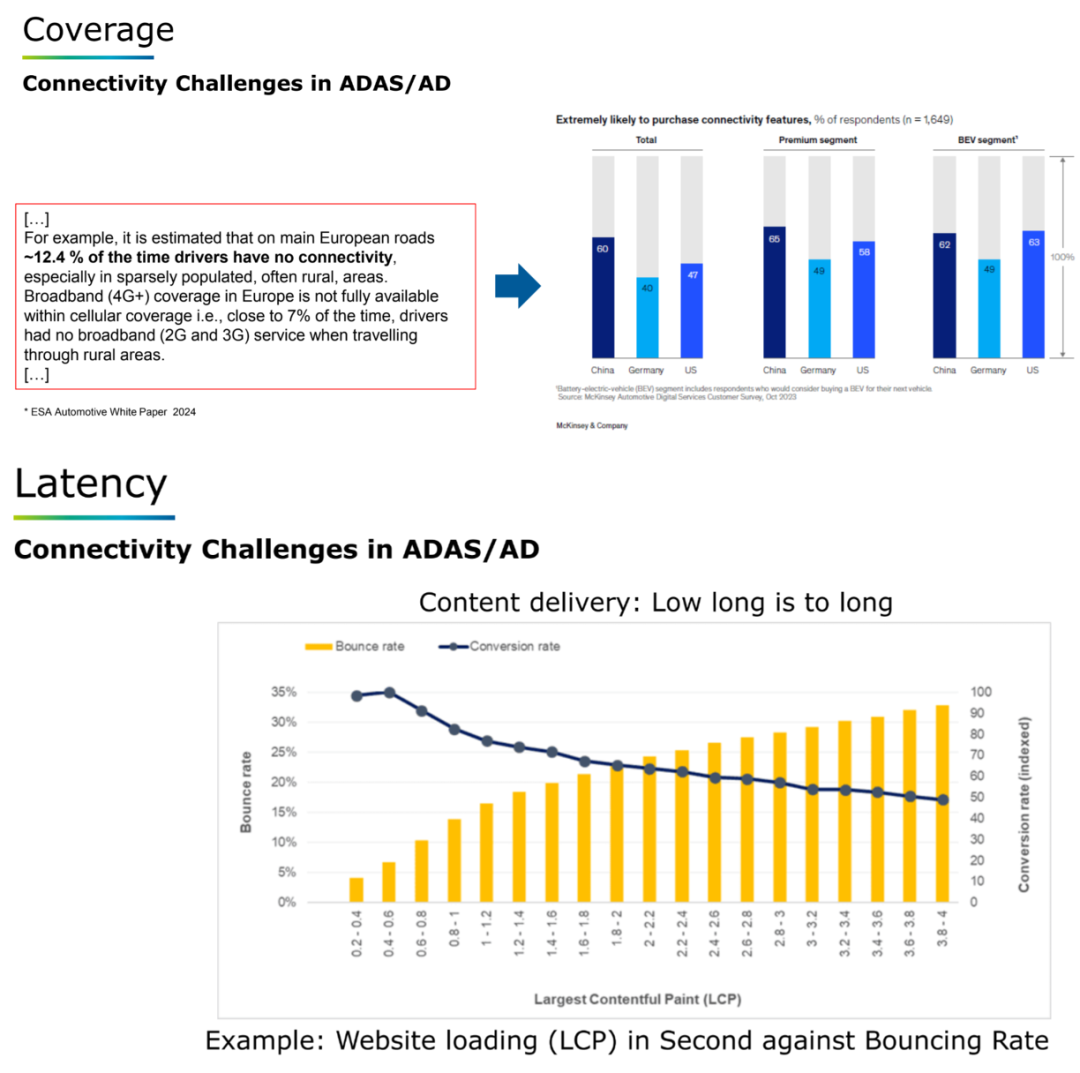
Such scenarios are more susceptible to communication interruptions in high-speed movements, tunnels, or remote areas. In developed regions of Europe, vehicles remain in a "no connection" state for about 12.4% of the time, with approximately 7% of that time unable to even guarantee basic connections like 2G/3G.
This poses significant challenges to services such as navigation, fleet management, fault diagnosis, and eCall/bCall in ADAS systems. More critically, in complex urban or rural terrains, signal obstructions and network congestion can further exacerbate communication delays, degrade user experience, and even jeopardize system safety.
In the current trend of software-defined vehicles, connectivity serves not only as an information pathway but also as an integral part of the vehicle's overall functionality. Functions such as remote control of air conditioning, OTA map and feature updates, remote fault diagnosis, and predictive maintenance all depend on real-time and reliable links.
Connectivity interruptions can result in failed data uploads, laggy remote updates, ineffective fleet scheduling, and can also affect the "disengage-reengage" response of L3/L4 autonomous vehicles.
Maintaining continuous, low-latency connections in a dynamic network environment has emerged as a core technical concern across the ADAS/AD system industry chain.
Part 2: Multi-WAN Seamless Network Architecture – The Key Path to Solving Complex Communication Scenarios
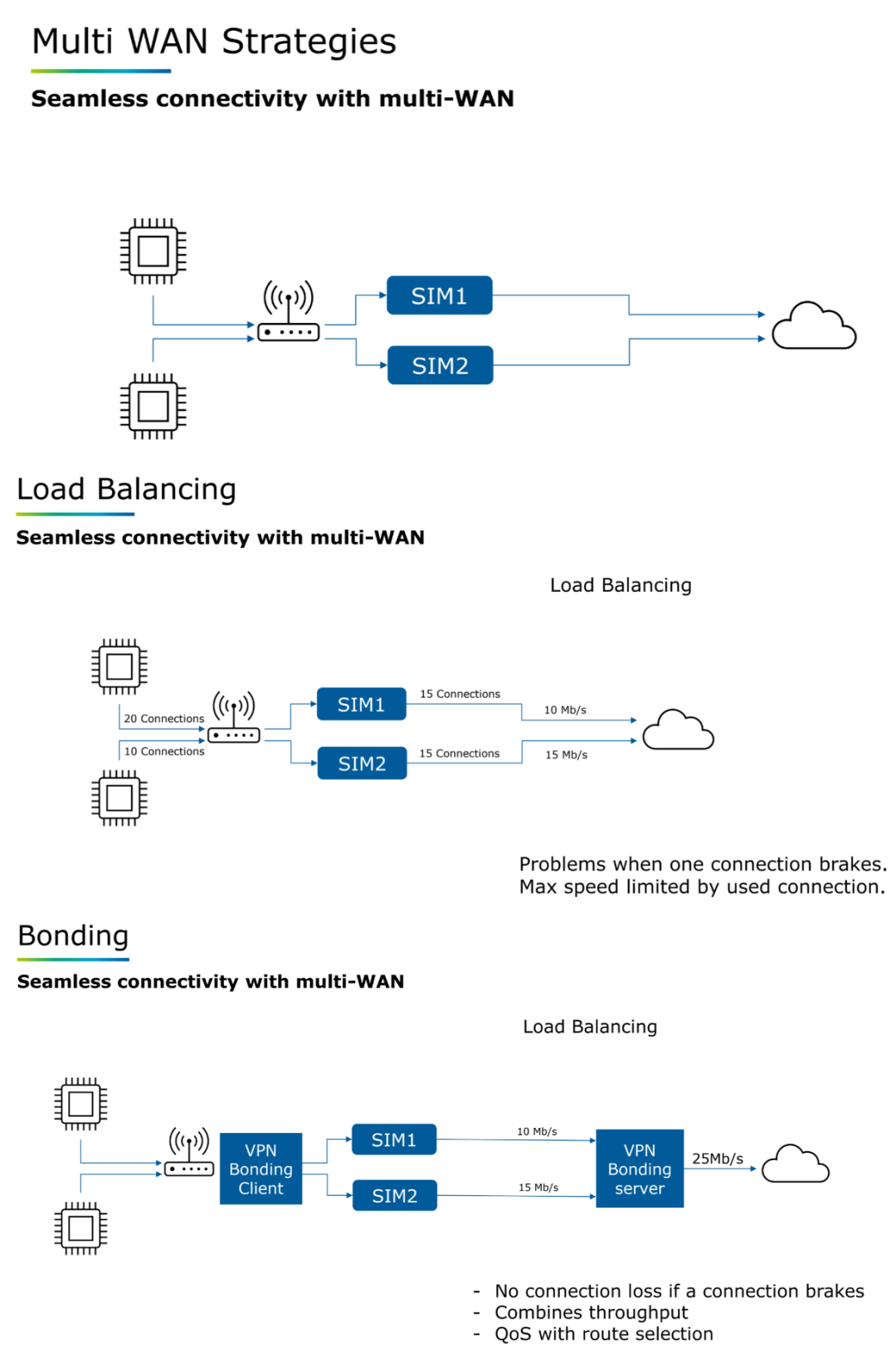
To overcome network bottlenecks, AVL proposes a "seamless connectivity" strategy based on a multi-WAN architecture. By intelligently scheduling multiple types of network connections (such as 4G/5G cellular networks, WiFi, V2X, satellite communications, etc.), it achieves intelligent switching, concurrent transmission, and redundant coverage, providing vehicles with "anytime, anywhere, uninterrupted" communication capabilities.
Core Elements of the Multi-WAN Strategy:
- Parallel Access and Intelligent Switching: Multiple network interfaces (Modems) can simultaneously connect to networks of different operators or technical standards, intelligently selecting the optimal path or performing redundant transmission based on real-time link quality indicators (latency, bandwidth, packet loss rate).
- Fault Tolerance and Redundancy Mechanism: When the primary connection fails, the system can switch to a backup path within milliseconds, ensuring tasks such as remote driving and in-vehicle entertainment remain uninterrupted.
- Edge Caching and Resume Mechanism: Edge buffering and incremental updates are implemented for large volumes of information such as maps, videos, and diagnostic data to improve fault tolerance.
- High-Throughput Bandwidth Aggregation: Through WAN aggregation technology, multiple link bandwidths are superimposed to meet the high-bandwidth application requirements of high-precision maps, HD videos, V2X collaborative perception, etc.
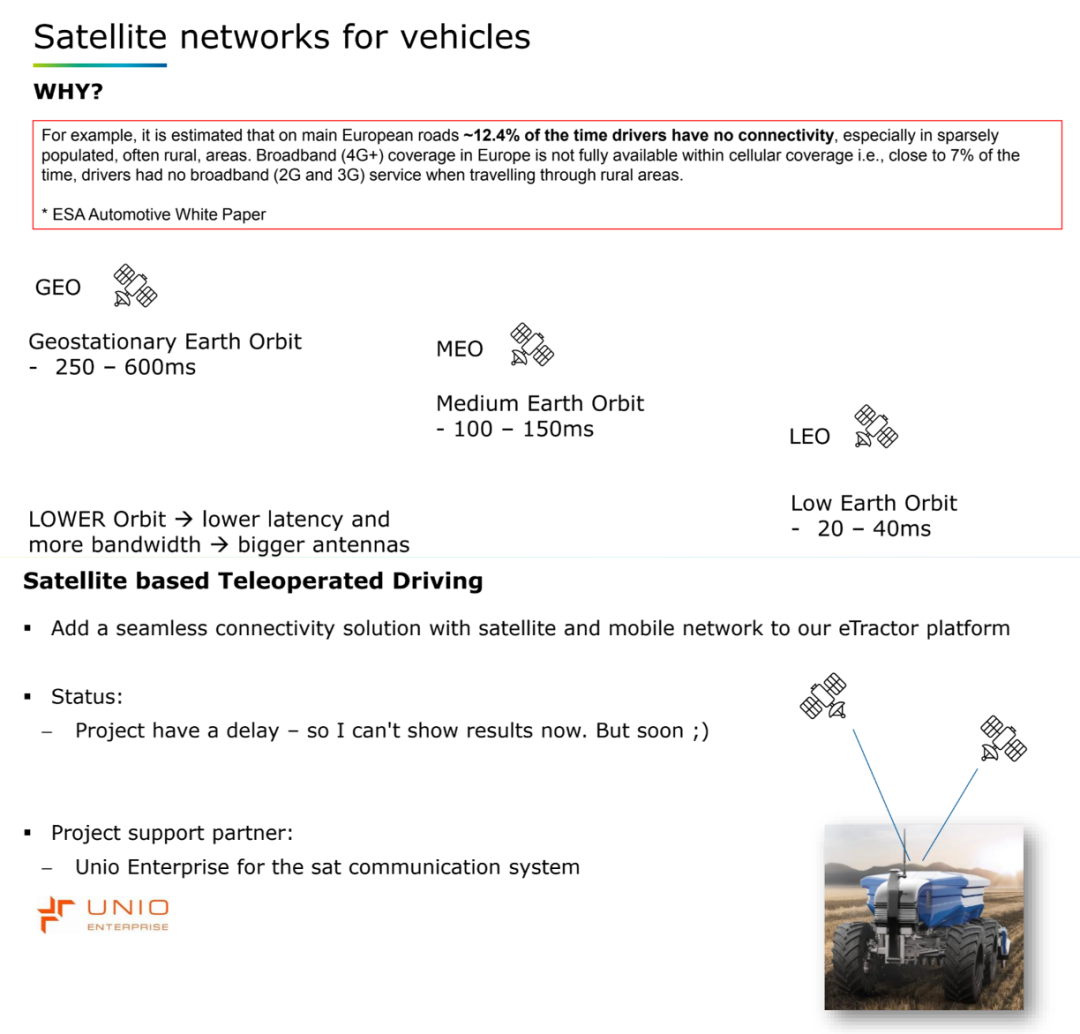
Satellite communication demonstrates significant supplementary value in regions without public network coverage, such as plateaus, deserts, and deep forests.
With the decrease in cost and optimization of latency in low-orbit constellation networks (such as Starlink, OneWeb), they are now capable of integrating into automotive communication systems. In the future, satellite communication will be merged with cellular networks to construct a multi-WAN architecture, achieving seamless "ground-space integration" coverage.
In terms of use cases, the multi-WAN solution is widely adaptable in scenarios such as passenger cars, agricultural machinery, and commercial vehicles.
- Agricultural Automation: Relies on data-driven precision operations, achieving remote scheduling, automatic cruising, and equipment health monitoring through multi-network integration.
- Fleet Management: Platforms can utilize real-time data uploads and OTA updates for unified operation and maintenance, as well as operational optimization.
- Remote Driving: Especially in logistics and urban obstacle clearance, multi-network communication can provide a critical redundant takeover mechanism for L3/L4 autonomous driving, ensuring high-reliability communication support.
Summary
As ADAS progresses from L2+ to L3/L4 and even the Robotaxi stage, "vehicle-road collaboration" and "human-vehicle-cloud collaboration" will become the mainstream communication paradigms, underpinned by the high-reliability connectivity provided by the multi-WAN network architecture.
The industry has now recognized that a single communication path cannot meet the stringent requirements of ADAS systems to be "always online." Communication diversity, fault tolerance, and real-time scheduling capabilities will be the keys to the success of future intelligent driving systems. The multi-WAN seamless network architecture serves as the "digital foundation" in the new generation of intelligent transportation, making the construction of an "always-online" intelligent in-vehicle network a tangible reality.
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'
-
![]()
Zhipu's Trillion-Dollar Valuation: A New Chapter for China's AI
-
![]()
Is Laifen, a 'Dyson Alternative' on the Rise, Now Ensnared by the 'Alternative Curse'?
-
![]()
Beyond Patents: Insta360 and DJI Compete in Retail
-
![]()
Piercing Through Industry Chaos: The Curtain Rises on Compliance for Autonomous Driving






