What Are the Technical Requirements for Different Levels of Autonomous Driving?
 10/20 2025
10/20 2025
 755
755
When discussing autonomous driving, the classification of its levels inevitably comes into the spotlight. The Society of Automotive Engineers (SAE) has categorized autonomous driving into five levels, L0 to L5, based on the varying degrees of involvement of autonomous driving systems and human drivers in driving tasks. In China, the "Classification of Driving Automation for Vehicles" (GB/T 40429 - 2021) has also been issued, which clearly outlines the technical aspects tailored for different levels of autonomous driving. Why is it necessary to classify autonomous driving? And what factors are taken into account in this classification?

Both the SAE standards and domestic standards mainly consider two key points for classifying autonomous driving. The first is the extent to which the system can carry out driving tasks on behalf of humans. The second is determining who is responsible when the system is unable to handle a situation. As the level of autonomous driving increases, the vehicle takes on more driving tasks, and the human driver's supervisory role gradually diminishes. At the highest level (L5), the system can independently complete the entire driving task in any scenario and at any given time.
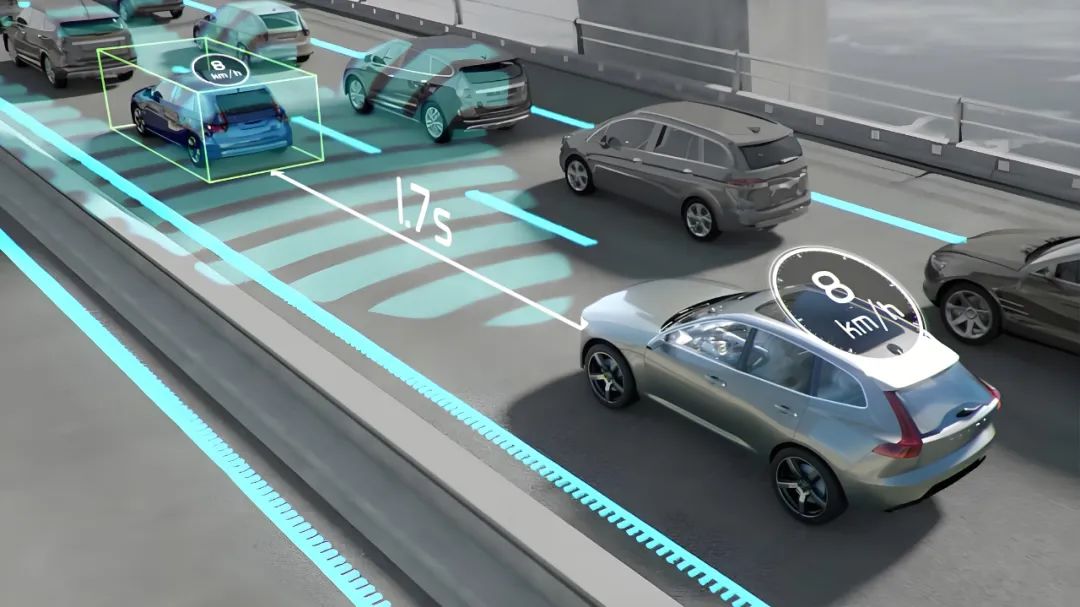
Lower - level autonomous driving systems primarily serve as assistants to drivers. For example, they can help maintain a safe distance on highways or make minor lane adjustments. Mid - level systems start to show the ability to operate independently in limited scenarios. In such cases, the system can handle driving for a certain period but still requires human intervention as a backup. High - level systems are designed to cope with numerous uncertain and complex situations. They need to be capable of autonomously judging and handling various emergencies. This transition from "assistance to autonomy" may seem like a quantitative accumulation, but in reality, it involves qualitative leaps in perception, decision - making, control, redundancy, and verification.
Gradual Improvement in Technical Capabilities from Perception to Decision - Making
The technical framework of autonomous driving can be roughly divided into several main components: perception (sensing the surrounding environment), localization and mapping (determining the vehicle's position), prediction and decision - making (anticipating others' actions and deciding one's own course), control (translating decisions into vehicle movements), and human - machine interaction and degradation strategies (how to transfer control to humans or safely stop the vehicle in abnormal situations). At lower levels, these modules can be relatively simple. However, at mid - to high - levels, they must not only be more precise but also demonstrate provable reliability and fault tolerance.
Lower - level systems may only require a single sensor to fulfill basic functions. For instance, radar can be used for adaptive cruise control, and front - facing cameras for lane departure warnings, which are sufficient for lower - level autonomous driving. At higher levels, the limitations of single sensors become increasingly evident. Cameras are sensitive to strong backlight, low - light conditions at night, and adverse weather such as rain or snow. Millimeter - wave radars are not as good as cameras in recognizing fine shapes. Lidars also experience performance fluctuations under certain weather conditions. Therefore, advanced systems adopt multi - sensor fusion, combining data from different sensors to enhance robustness. Fusion is not as simple as merely stacking data; it also involves tasks like timing alignment, coordinate transformations, confidence assessments of each sensor, and anomaly detection, all of which are labor - intensive.
Localization and mapping are also crucial for the advancement of autonomous driving levels. Basic localization relying on the Global Navigation Satellite System (GNSS) and inertial navigation can be adequate for low - speed urban assistance. However, when precise lane - level decision - making is required, high - precision localization and high - definition maps become essential. Maps not only contain geometric information but also need to semantically describe lane connectivity, traffic rules, and historical events. Moreover, maps must be updated in a timely manner because road construction, temporary closures, and lane marking changes can all lead to map mismatches. The system needs to devise strategies to deal with inconsistent maps and cannot assume that the map is always accurate.
Prediction and decision - making are at the core of the "intelligence" of autonomous driving. Lower - level decisions are often based on rules and simple models. In contrast, mid - to high - level systems require trajectory predictions for dynamic targets, assessing the risk - benefit of multiple alternative strategies, and making real - time choices. This demands more complex models, greater computational power, and stricter latency control. At this stage, decision - making must also incorporate explicit mechanisms for accident avoidance and safety constraints. It is not just about finding the optimal path but also ensuring a safe retreat in extreme or abnormal situations.
As the level of autonomous driving continues to rise, the requirements at the control level also evolve. Initially, it is about smoothly executing longitudinal and lateral operations. Later, it becomes necessary to maintain vehicle stability under redundant hardware and disconnected scenarios. Control algorithms need to take into account the physical limits of actuators, vehicle dynamics, and conservative strategies in case of sensor degradation. The software architecture must support hot redundancy and failure switching to ensure that the system remains controllable even when some modules fail.
Turning "Can Drive" into "Allowed on the Road"
The ultimate goal of an autonomous driving system is not to enable independent driving in a closed scenario but to transform autonomous driving from "being capable of driving" to "being able to drive reliably and provably." This requires a redundancy design, a rigorous verification system, and supporting regulatory standards. Redundancy is not simply about adding more of the same equipment; it involves designing across levels and modules, such as sensor - level redundancy, computational platform redundancy, and power and communication link redundancy. The core purpose of redundancy design is to prevent single - point failures from leading to safety - critical failures while ensuring that the switching process is rapid and does not introduce new hazards.
For autonomous driving systems, verification work will inevitably take up a significant portion of the development cycle. Lower - level functions can be verified through scenario testing and laboratory verification. However, mid - to high - level functions require massive simulations to cover numerous boundary situations, millions of miles of real - vehicle verification, and specialized testing for edge cases. Verification methods must also become more refined, including formal verification, scenario generation, causal attribution analysis, and robustness testing. Evaluation metrics should not only focus on average performance but also on the worst - case scenarios under extreme conditions and fault recovery times. This is precisely why large automakers and autonomous driving companies invest enormous resources in closed - loop simulations and scenario replay analysis.
Taking Gradual Steps Is More Realistic Than Achieving Everything at Once
At present, many automakers have launched autonomous driving systems for various application scenarios. To ensure that autonomous driving can better serve people, it is essential to "keep the technology in check" by selecting controllable operational design domains and confining the system within those domains. This is a feasible strategy for the early deployment of autonomous driving. Shuttle buses operating in closed campuses or designated lanes and driverless taxis undergoing trial operations in specific urban areas are examples of this strategy. By controlling complexity within a certain range, the system can first address various degradation, abnormal, and catastrophic modes before gradually expanding the operable scenarios.
Several long - term tasks cannot be overlooked when promoting high - level autonomous driving to mass production and widespread adoption. The first is the trade - off between cost and weight. High - precision sensors, large computational platforms, and redundant modules all increase vehicle cost and energy consumption, posing obstacles to mass production. The second is software and data lifecycle management. Autonomous driving systems require frequent model updates, perception parameter calibrations, and bug fixes. Ensuring update security, reliable rollback mechanisms, and online version management is an ongoing engineering challenge. The third is social and user acceptance. How users respond to takeover requests in emergencies and society's tolerance for autonomous driving accidents will directly impact deployment strategies.
Technological development does not follow a straight line. At present, a prudent path often involves phased iteration. First, achieve a high degree of automation within controllable domains, accumulate operational experience, data, and user trust, and then gradually expand the boundaries. Simultaneously, the construction of a collaborative industrial ecosystem must keep pace. This includes teams for the continuous maintenance of high - definition maps, the deployment of roadside intelligent infrastructure, and cross - enterprise data sharing and standardization efforts. No single company can solve all problems alone; collaboration and standardization will become increasingly important in the future.
Final Thoughts
Every upgrade in autonomous driving levels represents a qualitative change in engineering. Perception must evolve from "simply seeing" to "robustly seeing in complex environments." Decision - making must transition from "following rules" to "making safe choices in unpredictable situations." The system must progress from "occasional faults that can be taken over by humans" to "never putting the vehicle in danger at any time." To achieve these goals, simultaneous advancements are needed in sensing, computational architecture, software engineering, verification methods, and regulatory adaptation. Rather than striving to achieve the highest level overnight, a more realistic approach is to excel at every step, design degradation paths that are safe and reliable, and continuously verify and iterate in the real world.
-- END --
-
![]()
Enflame Tech's IPO Journey: Navigating Over 5.9 Billion Yuan in Losses and Soaring Debt in Q1 This Year
-
![]()
Trillion-Yuan Giant Li Shufu 'Streamlines': Could Levc Be the Casualty?
-
![]()
AI Competes for Electricity and Generates Power in the Gobi Desert
-
![]()
The First Batch of Victims of the AI Bubble: Programmers
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'






