What Is an Autonomous Driving Decision System? What Are the Development Challenges?
 10/27 2025
10/27 2025
 671
671
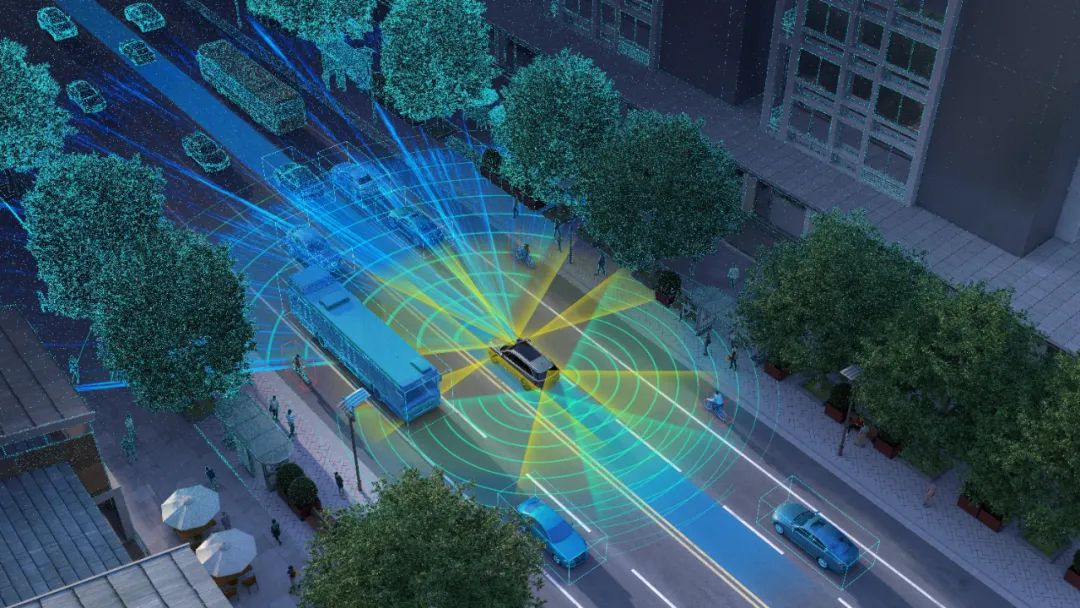
Envision an autonomous vehicle as an individual who is constantly learning and making decisions. Its "eyes" are in charge of visual perception, its "memory and reasoning" handle thinking processes (including prediction and decision - making), and its "hands and feet" are responsible for actions (such as planning and control). The decision - making system lies at the core of this entire process. It integrates information from perception sensors (including cameras, radar, LiDAR, positioning systems, and maps) and prediction modules (which make guesses about the future behavior of surrounding pedestrians and vehicles) to generate instructions. These instructions cover aspects like "how to proceed next, at what speed, and how to avoid obstacles." Decision - making is not a single, isolated action but a hierarchical process. First, it determines the overall course of action (at the behavioral layer, for example, "changing lanes," "turning left," or "slowing down to follow" other vehicles). Then, it converts this behavioral decision into a specific, safe, and executable trajectory (at the trajectory layer). Finally, it sends the trajectory to the lower - level controller for tracking (at the control layer).
The decision - making system must simultaneously meet multiple requirements. Safety is always the top priority, ensuring that passengers are not put at risk. Comfort is also crucial, as it should not make passengers feel dizzy. Legality requires the system to comply with traffic rules, while efficiency demands that it does not operate unnecessarily slowly. Explainability is also necessary, enabling the ability to trace the cause of problems. However, these requirements often conflict with one another. For instance, the safest action might be overly conservative, which could affect efficiency. On the other hand, the fastest action could bring about risks. Thus, the decision - making system is essentially a process of balancing these various requirements.
Classic and Mainstream Approaches: Hierarchical, Optimization, and Rule - Based Methods
For a long time, decision - making and planning in autonomous driving have mainly followed a "hierarchical + optimization/sampling" approach. The system first selects a reasonable strategy based on the map and current traffic conditions. For example, at an intersection, it decides whether to "wait and then turn left" or "accelerate through." These strategies are designed to ensure the safe operation of autonomous vehicles.
To generate safer trajectories, common methods can be divided into two main categories: sampling/search - based and optimization - based. Sampling - based methods generate several candidate trajectories. These can be based on a pre - existing trajectory library or through random sampling. Then, they evaluate the cost of each trajectory, taking into account factors such as collision risk, passenger comfort, distance traveled, and regulatory constraints. After that, they select the trajectory with the lowest cost. These methods are intuitive but require a large number of candidate samples in complex scenarios, which leads to a high computational burden.
Optimization - based methods treat trajectories as continuous functions and use mathematical optimization techniques to find the minimum - cost path. Common tools in this category include Lagrangian - based optimization, iterative linear quadratic regulation (iLQR), and model predictive control (MPC). MPC is particularly popular because it directly incorporates dynamic constraints, state and control constraints into the optimization problem. It can also handle environmental changes through finite - horizon rolling optimization, allowing the control system to consider the future while operating in real - time.
In addition to pure mathematical optimization, rule/symbolic methods are widely used to ensure safe driving. For example, Mobileye's Responsibility - Sensitive Safety (RSS) proposes a set of mathematical "common - sense driving rules" to determine when defensive actions should be taken. This provides a white - box safety guarantee for the system. RSS emphasizes verifiability and explainability and is one of the representatives of the "provably safe" approach in the industry.
In many commercial systems, an additional "safety referee" or "supervisory safety layer" is added. This layer does not generate trajectories itself but intercepts or corrects primary planning actions when they may cause danger. In recent years, there has been a trend of combining learning - based modules (which are responsible for flexible behavior in complex scenarios) with physics/rule - based safety modules (which ensure safety even if the learning module makes mistakes) to form a "learning + evidence - based safety" hybrid structure.
Recent Technological Hotspots in the Past Two Years
There is a clear trend in the autonomous driving industry. First, the boundaries between prediction and planning are becoming blurred. In the past, perception was responsible for "seeing," prediction for "guessing the future," and planning for "deciding." Now, more and more research efforts are attempting to tightly couple world modeling, multi - agent behavior prediction, and trajectory generation. Some even incorporate planning into the same learning framework for training.
The Transformer architecture is widely adopted due to its excellent capabilities in temporal and interaction modeling. Works like MTR (Motion TRansformer) and Agent Former have demonstrated the strong performance of Transformer in multi - agent, long - term trajectory prediction. They can use self - attention mechanisms to capture interactions between different traffic participants, generating more reasonable and multimodal future trajectory predictions.
The second related trend is the introduction of diffusion models into trajectory prediction and sampling generation. Diffusion models excel at generating high - quality and diverse samples from complex distributions. They can better represent future uncertainties, and the generated trajectory patterns are usually richer than those produced by traditional Gaussian mixtures or simple regressions.
The third major trend is the use of BEV (Bird’s Eye View). This approach projects or converts raw camera/radar/LiDAR point cloud data into a vehicle - local top - down grid or vectorized map. Then, it performs perception, trajectory prediction, and planning on this BEV representation. The advantage of BEV is that it explicitly represents spatial structure, allowing subsequent planning modules to directly perform cost evaluation and trajectory optimization in a unified space.
The fourth noteworthy direction is the exploration of "large models" and multimodal models. Some companies and research teams are attempting to apply large multimodal neural networks to driving scenarios. They use larger models to integrate camera frames, point clouds, maps, and historical trajectories. Some even incorporate language or world knowledge into the decision - making process. For example, Waymo and Google are internally exploring the possibility of using large multimodal models for world modeling and trajectory generation (such as EMMA). The goal is to use more general models to shorten the "information gaps between modules" and enhance reasoning capabilities. However, they also face computational and engineering challenges.
The commonality of these technological trends is a greater emphasis on "joint modeling" and "uncertainty modeling." In traditional systems, each layer is independently optimized, and information is "compressed" and transmitted between layers. New trends attempt to train jointly in larger end - to - end or semi - end - to - end frameworks to avoid information loss. At the same time, they use probabilistic or generative models to retain and utilize uncertainties (such as when emergency braking may occur or the possible multiple trajectories of other vehicles), making planning more robust in the face of multiple possible futures.
Safety, Verifiability, and Engineering Challenges
Technological strength does not necessarily mean immediate road deployment. Autonomous driving decision systems face extremely high engineering and compliance thresholds. Safety and verifiability are among the key challenges. Machine learning models, especially end - to - end and deep networks, are often "black boxes" and may exhibit unpredictable behavior in extreme or rare scenarios. Therefore, there has been a consistent emphasis on retaining explainable and verifiable modules in the system or adding provably safe layers outside the learning modules. Techniques like Control Barrier Functions (CBF) are combined to ensure the system meets safety constraints. In recent years, solutions that combine real - time MPC and CBF have demonstrated the ability to provide safety guarantees at a computable cost in urban scenarios, representing meaningful progress in provably safe methods.
Real - time performance and computational power are also difficult considerations in the development of decision systems. Diffusion models, giant Transformers, and multimodal large models are resource - intensive during training and inference. Actual vehicles have strict limitations on computational power, power consumption, heat dissipation, and latency. This requires any decision model to provide output within strict latency budgets. A common approach is to use a hybrid strategy. Lightweight or deterministic modules are employed for "fast - fallback" decisions at the edge, while large models are used in the cloud or offline environments for strategy updates, data sampling, or simulation training.
Another challenge is handling rare/dangerous scenarios. In real - world traffic, many dangerous but rare edge scenarios can occur. Since these scenarios are dangerous, the system must be able to handle them flexibly. Solutions include generating large amounts of synthetic data, using simulation - based extreme scenario generation, importance sampling and adversarial training, or using rule - based mandatory safety boundaries to cover the blind spots of learning systems. Additionally, formal verification of learning systems remains an open problem, requiring a combination of explainable AI, provably safe theory, and sufficient real - world/simulation verification frameworks.
Regulations and social trust have always been the most difficult issues to balance in the development of autonomous driving. The behavior of decision systems involves questions of responsibility and ethics. Attempts like Mobileye's RSS to mathematize "common - sense driving" facilitate proof and communication but also raise discussions about responsibility and legal aspects. Many technological approaches make transparency and traceability basic requirements for productization. Decision logs, black - box - style data recording and playback, and built - in explainability interfaces in the system are all necessary means to establish social trust.
Final Thoughts
Autonomous driving decision systems rely on both rigorous control theory and optimization algorithms, as well as statistical learning and data - driven modeling of complex traffic scenarios. While classic hierarchical optimization and rule - based methods have natural advantages in safety and explainability, new technologies such as Transformer, diffusion models, BEV representation, and multimodal large models bring stronger modeling capabilities and flexibility in dealing with uncertainties.
Although rapid technological progress is attractive, achieving stable, explainable, and regulatable operation in complex road scenarios still requires time, systematic engineering implementation, and standardized verification processes. Every "trendy term" in research directions is worth paying attention to, but more caution and verification are needed when bringing them to the roads.
-- END --
-
![]()
Enflame Tech's IPO Journey: Navigating Over 5.9 Billion Yuan in Losses and Soaring Debt in Q1 This Year
-
![]()
Trillion-Yuan Giant Li Shufu 'Streamlines': Could Levc Be the Casualty?
-
![]()
AI Competes for Electricity and Generates Power in the Gobi Desert
-
![]()
The First Batch of Victims of the AI Bubble: Programmers
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'






