Why Should Autonomous Driving Emphasize Trajectory Prediction?
 11/20 2025
11/20 2025
 622
622
When discussing autonomous driving, we usually focus more on the 'visible' components, such as sensors and perception systems, as well as the 'how-to-move' aspects, like planning and control. However, there is a frequently underestimated yet crucial link between these two: trajectory prediction.
The role of trajectory prediction is to determine, within a timeframe of a few seconds to over ten seconds, how other traffic participants might move. Without this capability, an autonomous driving system would resemble a passive follower, only able to react to current conditions. In the event of sudden changes ahead, it would easily fail to respond in time. Given the complexity of real road environments, with numerous participants and frequent interactions, only by systematically predicting various future possibilities can the vehicle make both safe and smooth decisions.
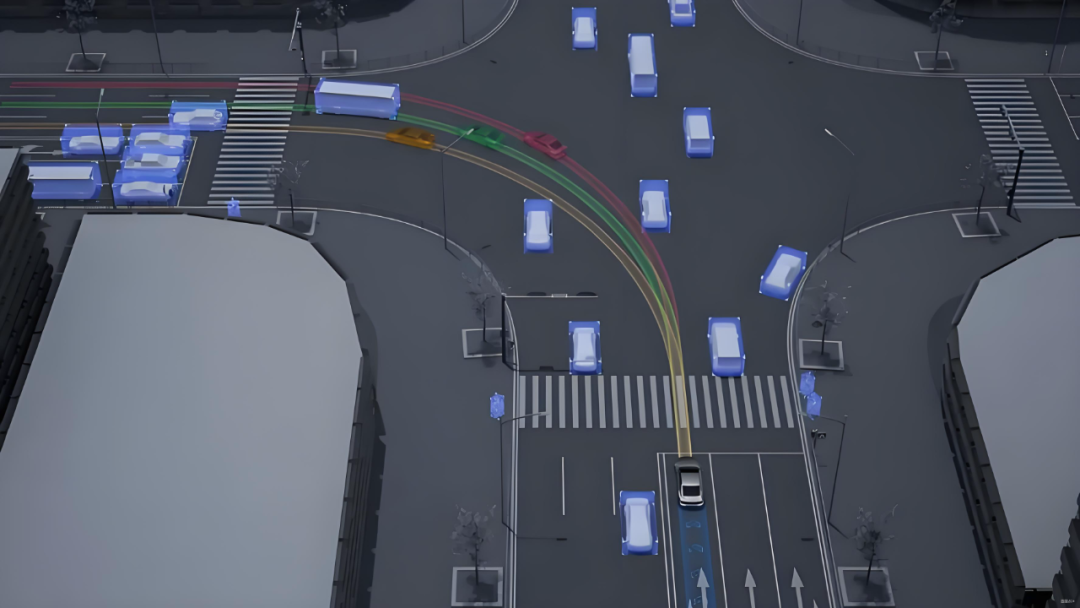
Image sourced from the internet

What is Trajectory Prediction and Its Role in the System
Trajectory prediction is essentially the process of deducing 'future possible states' from 'current states.' The perception module informs us about surrounding objects, their positions, directions, and speeds. The prediction module then calculates the likely movement trajectories and behaviors of these objects over a future period based on this information.
We can broadly divide an autonomous driving system into several key components: perception is responsible for understanding the environment, prediction for anticipating the future, planning for selecting safe and efficient paths, and control for executing specific wheel, steering, and braking actions. Prediction acts as a bridge, transforming perception outputs into future scenarios with a temporal dimension for the planning module to optimize and make decisions. Without prediction, planning can only formulate trajectories based on current 'snapshots,' leading to inadequate braking or insufficient avoidance when encountering sudden lane changes by adjacent vehicles or pedestrians crossing the road.
Prediction is not as simple as 'drawing a straight line at the current speed.' Within just a few seconds, the behavior of traffic participants can be influenced by various factors, including lane structure, traffic signals, distance from the preceding vehicle, driver's intention to change lanes, pedestrian's readiness to cross, surrounding vehicles' yielding or straddling lines, and even weather and road conditions. Therefore, high-quality trajectory prediction must comprehensively consider physical constraints (such as vehicle dynamics and road geometry), scene semantics (such as lane markings, no-turn signs, and traffic lights), and multi-agent interactions (such as neighboring vehicle intentions and pedestrian behaviors), ultimately outputting a set of reasonable future trajectories and their probability distributions, rather than a single 'average path.'
 Image sourced from the internet
Image sourced from the internet
For an autonomous driving system, providing multiple possibilities with their probabilities of occurrence is safer than offering a single vague average trajectory. This is because the so-called 'average trajectory' often falls between two reasonable paths, and that intermediate position may be impractical or even dangerous in reality.
The time scale involved in prediction is also crucial. Short-term prediction (0.5 s–3 s) typically affects the ability to brake or adjust direction in time, with low tolerance for error and high real-time requirements. Medium-term prediction (3 s–10 s) is more used for strategic-level decisions, such as whether to change lanes in advance or avoid congested routes. Long-term prediction (10 s or more) leans more towards path planning and efficiency optimization. Therefore, a hierarchical prediction strategy is often adopted in engineering, using lightweight, high-precision models for short-term real-time response and more complex models for long-term strategic assessment.
In summary, the role of prediction is to transform the 'uncertain future' into actionable information, enabling the planning system to lay out in advance in complex interactive environments. This is precisely why it is indispensable.

Technical Routes and Engineering Challenges in Trajectory Prediction
There are various methods for trajectory prediction, including not only traditional schemes based on physical laws and model-driven approaches but also a large number of machine learning and deep learning models that rely heavily on data.
The simplest physical methods assume that the target continues to move at its current speed and acceleration or make short-term extrapolations based on vehicle dynamics. These methods are interpretable and computationally inexpensive, providing relatively stable short-term predictions. However, they fall short in scenarios that require consideration of behavioral intentions or complex interactions. Feature-based machine learning methods, on the other hand, extract features such as speed, acceleration, relative position, and lane departure manually and input them into traditional regression or classification models. These methods can identify behavioral patterns to some extent but rely on artificial feature design.
In recent years, deep learning methods have gradually become mainstream, particularly using graph networks, attention mechanisms, temporal models, and generative models to learn complex interaction features directly from trajectory data, images, and high-definition maps.
Image sourced from the internet
One important direction is multimodal prediction. In reality, traffic developments often have more than one possibility. For example, a vehicle stopped at an intersection may go straight or turn left, and a pedestrian may wait or suddenly cross. Multimodal models output multiple possible trajectories and assign probabilities to each. When processing these candidate trajectories, the autonomous driving system needs to devise corresponding strategies: should it adopt a conservative strategy based on the worst-case scenario, or optimize expected utility based on probability weighting? This directly determines whether the system's driving style is conservative or aggressive.
At the same time, distinguishing the sources of uncertainty is crucial. The model should be able to differentiate between inherent uncertainty in traffic behavior (e.g., pedestrians having multiple choices) and cognitive uncertainty caused by perception noise or occlusion. The latter can be reduced through sensor redundancy or improved perception algorithms, while the former must be handled in the planning stage with probabilistic forms and safety margins.
Trajectory prediction also faces the pressure of real-time computation. Modern deep models, while powerful, have high computational requirements. Inference time on vehicle platforms is typically limited to tens to hundreds of milliseconds, and prediction must be completed within this time budget; otherwise, it will slow down the planning and control stages. Common coping strategies include model compression, distillation, quantization, or adopting a hierarchical strategy where a lightweight model handles real-time demands at the front end, and a large model continuously updates weights in the background.
Additionally, data and evaluation pose significant challenges. Common evaluation metrics such as ADE (Average Displacement Error), FDE (Final Displacement Error), and multimodal coverage rates, while providing quantitative references, do not fully reflect safety. A model performing well on average metrics may still fail in a few dangerous scenarios. Public datasets have driven research progress, but their data distributions may differ significantly from the road types and traffic habits in actual deployment areas, leading to poor model transferability. Therefore, extensive localized data, scene synthesis, and simulation testing are often required to compensate for these shortcomings.
Finally, there is the issue of interaction modeling. In real traffic, behaviors are mutually influential. My acceleration may affect your lane change, and your yielding intention may affect whether I cut in. This bidirectional coupling makes the unilateral 'prediction-planning' process prone to errors. A viable solution is to adopt joint learning or closed-loop design, allowing the prediction module to consider the impact of the ego vehicle's intentions on other vehicles or enabling the planning module to incorporate the likely reactions of other vehicles into its decisions. Such joint modeling can significantly reduce the risks arising from 'inconsistent prediction and planning,' but it requires more computational resources and complicates system verification.

System Design and Safety Strategies to Ensure Prediction Reliability
Whenever prediction is involved, errors are inevitable. The key lies in how the system prevents and mitigates the impacts of these errors. Common strategies to prevent trajectory prediction errors include redundant design, conservative decision-making, rule-based constraints, and rapid anomaly detection.
Redundancy refers to the use of multiple sensors and models running in parallel to enhance safety. For example, lidar and radar complement each other in adverse weather conditions, and visual models verify trajectory models. Running multiple prediction models simultaneously improves reliability. Conservative strategies involve automatically increasing safety margins when uncertainty is high. When prediction confidence is low, the planning module chooses a longer following distance or avoids risky lane changes. Rule-based constraints use rule-based methods to enforce core safety boundaries, such as prohibiting crossing solid lines or prioritizing avoidance actions for suddenly appearing pedestrians. Even if learning models suggest otherwise, these recommendations are filtered by the rule layer.

Image sourced from the internet
Moreover, closed-loop simulation and online detection are also critical. Rare extreme scenarios are difficult to encounter in reality, so they need to be generated through simulation platforms for training and regression testing. After the vehicle is deployed, an anomaly detection mechanism should be established. When the model's predictions significantly deviate from sensor observations or actual trajectories, the system should issue alerts and trigger safety protocols. Model updates must undergo rigorous processes, including offline evaluation, simulation replay testing, small-scale gray release, online monitoring, and rollback mechanisms. Any misstep in these steps could pose safety risks.
Interpretability and verifiability are also essential aspects of system design. For regulatory and liability clarification purposes, the system must be able to retrospectively and justify its actions after an accident. Therefore, the trajectory prediction module should not only output trajectories and probabilities but also provide key factors influencing the prediction or confidence indicators for post-event analysis. Additionally, in high-risk scenarios, rules with clear semantic restrictions should be prioritized to ensure safety, such as prioritizing deceleration and stopping when encountering jaywalking pedestrians rather than relying solely on data-driven prediction results.

Final Remarks
The role of trajectory prediction is to transform the 'observed world' into 'possible futures,' providing a temporal decision-making basis for planning and control. In a multi-agent, highly interactive, and rule-driven road environment, without prediction, autonomous driving can only respond passively, reacting slowly or being overly conservative, and struggling to compete with human driving in terms of efficiency and comfort.
-- END --
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'
-
![]()
Zhipu's Trillion-Dollar Valuation: A New Chapter for China's AI
-
![]()
Is Laifen, a 'Dyson Alternative' on the Rise, Now Ensnared by the 'Alternative Curse'?
-
![]()
Beyond Patents: Insta360 and DJI Compete in Retail
-
![]()
Piercing Through Industry Chaos: The Curtain Rises on Compliance for Autonomous Driving






