How do autonomous vehicles overtake?
 02/24 2026
02/24 2026
 564
564
When we drive daily and someone wants to overtake, they simply check if there are vehicles behind or beside them, signal, accelerate slightly, and change lanes. This action may seem simple, but for autonomous vehicles, it requires coordination from multiple aspects.
To complete an overtaking maneuver, autonomous vehicles must go through a complete process of perception, understanding, decision-making, planning, and control. At each step, safety and regulations must be considered. The vehicle needs to continuously perceive its surroundings, determine when and how to overtake safely, and then execute the operation as planned.
Before changing lanes, autonomous vehicles need to fully understand their surroundings, such as the speed and relative position of the vehicle ahead, the dynamics of other vehicles, road rules, and lane markings. This information comes from a combination of sensors mounted on the vehicle, including cameras, LiDAR, and millimeter-wave radar.
These sensors work together to construct a 360° view of the vehicle's surroundings. By fusing and processing this data, the autonomous driving system can accurately determine if there are vehicles ahead, the specific positions of surrounding vehicles, and whether the current conditions are safe for overtaking.
Decision-Making Phase: When Can You Overtake?
When the autonomous driving system determines that overtaking is necessary, its first step is to make a feasibility decision for overtaking. This involves verifying multiple safety conditions one by one.
The autonomous driving system must confirm whether the current road segment allows overtaking (e.g., the presence of no-overtaking markings), whether road markings and rules are clearly discernible, whether there is sufficient space in the adjacent lane to accommodate the vehicle, and whether there are vehicles approaching rapidly from behind.
Only when all necessary conditions are simultaneously met and comprehensively judged to be safe can the autonomous driving system approve the overtaking intention and proceed to the next phase of path planning and execution.
The decision-making phase is similar to the process we go through when driving to determine if we can overtake. When the vehicle ahead slows down, you check the rearview mirror to see if there are vehicles beside you and if there are dashed lines to change lanes. These processes are also necessary for the autonomous driving system.
In addition to glancing at the road conditions, the autonomous driving system must also predict in real-time the possible positions of surrounding vehicles in the next few seconds to determine if overtaking is truly safe.
Path Planning: How to Overtake?
Once it is determined that the conditions for overtaking are met, the next step is to develop an overtaking plan, a step known as trajectory planning.
At this point, a roadmap for the vehicle needs to be established, such as planning to change from the current lane to the adjacent lane, overtake the vehicle ahead, and then return to the original lane.
Overtaking path planning must not only consider the vehicle's own acceleration performance and steering capability but also ensure that it does not collide with other vehicles.
During the planning process, the autonomous driving system cannot change lanes arbitrarily. It calculates a smooth and safe curved trajectory to allow the vehicle to complete the maneuver stably.
Trajectory planning must meet multiple constraints, such as maintaining a sufficient safety distance, controlling lateral and longitudinal acceleration within a comfortable range, and complying with road rules. The goal of this phase is to enable the vehicle to complete the overtaking maneuver safely and comfortably.
Since overtaking requires a certain speed advantage, while planning the trajectory, the system must also plan the speed. It must decide on an appropriate acceleration or speed maintenance strategy based on the road speed limit, the speed of the vehicle ahead, and the target speed of the autonomous vehicle, ensuring that the entire process is neither too aggressive nor involves sudden deceleration.
Control Execution: Following the Plan
Once the decision-making and path planning are complete, the autonomous driving system begins to execute the overtaking maneuver. This step involves implementing the plan developed in the previous phase through specific actions.
The control module outputs specific control commands based on the planned trajectory and speed targets to adjust the throttle, brakes, and steering. This process must be very precise, as any deviation could lead to a failed overtaking maneuver or unstable driving.
During the overtaking process, the control system continuously checks the vehicle's state, compares the deviation between the actual motion and the planned trajectory, and makes immediate corrections. For example, if the sensors detect a suddenly accelerating vehicle beside the autonomous vehicle while it is executing a left turn and acceleration to overtake, it should immediately adjust the plan or cancel the overtaking maneuver.
During overtaking, it is also necessary to prevent the vehicle from skidding or the tires from losing traction, ensuring that the vehicle remains stable and controlled throughout the overtaking process. This prevents situations such as severe body sway or sudden loss of grip, allowing for a safe and smooth overtaking maneuver.
What Should Autonomous Overtaking Consider?
The most important aspect for autonomous vehicles during driving is to ensure safety, and the same applies to the overtaking process.
The design of the autonomous driving system must adhere to the core principle of "safety first." This means that even if the system determined in the previous phase that the current conditions allow for overtaking, if any potential risks arise during execution, it must without hesitation ly interrupt the overtaking maneuver, abandon the overtaking plan, and smoothly return the vehicle to follow behind the vehicle ahead.
The ability to terminate the current overtaking maneuver at any time in a dynamically changing environment is actually a key point that distinguishes the autonomous driving system from traditional driver assistance systems (such as those that merely maintain lane or cruise at a constant speed).
Simple driver assistance systems only assist in steering and throttle control in relatively clear and simple scenarios. In contrast, true autonomous driving must be able to weigh multiple risk factors on its own when facing complex traffic situations and be able to "say no" at any time to avoid danger.
This design of "being able to terminate overtaking at any time" must be based on real-time perception of the surrounding environment and strict safety assessments.
When the system continuously perceives rapidly approaching vehicles in the oncoming lane or detects vulnerable road users such as pedestrians or bicycles that may enter the vehicle's expected path during the overtaking process, it will not rashly occupy the oncoming lane or change lanes directly.
At this point, the autonomous driving system should implement a fallback strategy, returning the vehicle to its original lane and behind the vehicle ahead, waiting for a more suitable opportunity to overtake.
It is also important to note that overtaking does not only occur on highways. There is also a need to overtake on many urban or rural roads. The autonomous driving system should have different overtaking execution strategies in different scenarios.
On urban roads, there may be more lane changes followed by acceleration to pass through a queue of vehicles. On narrow roads, it may not involve executing a traditional overtaking maneuver at all but rather waiting for an opportunity or choosing a safer driving method.
However, regardless of the scenario, the overtaking maneuver cannot be separated from the four steps of perception, decision-making, trajectory planning, and control execution.
Final Words
The overtaking maneuver may seem simple, but for autonomous vehicles, it is still a process that requires coordination from multiple technologies. The seemingly simple overtaking maneuver can even reflect the performance of autonomous driving.
The choices and rhythm of a system during overtaking not only reflect the quality of its algorithms but also the designer's judgment in balancing safety and usability, respect for uncertainty, and commitment to passenger safety.
Overtaking is a magnifying glass that amplifies every detail of autonomous driving in perception, decision-making, ethics, and user communication. Only when the autonomous driving system performs safely and convincingly in these details does it demonstrate that the system truly has the capability to operate on the streets.
-- END --
-
![]()
Smartphone Prices Surge Amid Manufacturer Anxiety
-
![]()
Orbbec Soars to Record Heights, Eyes Further Capital Influx of 980 Million!
-
![]()
Tongding Interconnect Sets Up Shop in Shaoguan with 800 Million Yuan in Registered Capital
-
![]()
Before Kimi’s A-Share Debut, Zhipu Aims to Secure More 'Strategic Funding'
-
![]()
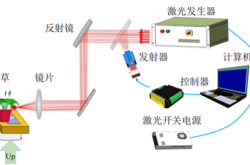
Innovative Leap | Fiber-Pluggable 1470nm Laser Source: Revolutionizing Precision Laser Weeding
-
![]()
73-Day Rapid Listing: Where Does Unitree's Wang Xingxing's 'Sense of Urgency' Come From?
-
![]()
AI Project Mindverse, Backed by Meituan, Faces Data Inflation Allegations Over Its Macaron Product
-
![]()
3000-word In-Depth Analysis | What Makes Physical AI So Magnetic? It Has Captivated Masayoshi Son, Jensen Huang, and Justin Sun All at Once