How does the booming end-to-end technology accelerate the implementation of intelligent driving?
 11/26 2024
11/26 2024
 636
636
"End-to-end" is undoubtedly one of the hottest buzzwords in the autonomous driving industry in 2024! (Related reading: To achieve autonomous driving, only end-to-end will do?) End-to-end technology effectively enhances the system's decision-making efficiency and overall performance by eliminating information loss and delay in data transfer between modules, enabling direct conversion from perception to control output through neural networks. The application of end-to-end technology is increasingly valued in the field of intelligent driving."
Traditional autonomous driving technology is based on a modular architecture, with functions such as perception, decision-making, planning, and control processed separately to achieve ultimate vehicle control. Although the modular design laid a solid foundation for the early development of autonomous driving, as the industry moves towards higher automation levels, the modular architecture has exposed issues such as inefficiency and information transmission loss.
To address these pain points, the end-to-end architecture has gradually entered the industry's field of vision and become a key path to drive the development of high-level autonomous driving at L4 and above. Leveraging deep learning models, end-to-end intelligent driving systems directly map sensor inputs to vehicle control commands, avoiding redundant conversion steps in traditional modular designs, enabling globally optimal and efficient computational performance.

Overview of End-to-End Technology
1.1 Definition and Classification of End-to-End Technology
In the field of intelligent driving, end-to-end technology refers to the direct processing of data captured by sensors through deep learning neural network models to output specific vehicle control commands, achieving an integrated process from "perception" to "decision-making." End-to-end intelligent driving systems can generally be classified into two types: narrow and broad.
Narrow end-to-end refers to the direct conversion of sensor data (such as camera images or LiDAR information) into vehicle control signals, including steering angles, acceleration, braking, and other action commands, through a single neural network model. This model fully processes data through neural networks, eliminating explicit data interfaces and rule settings, and is entirely driven by neural networks. The narrow end-to-end model significantly improves system integration and information processing efficiency but demands high data and computational power for model training due to its data-driven nature.
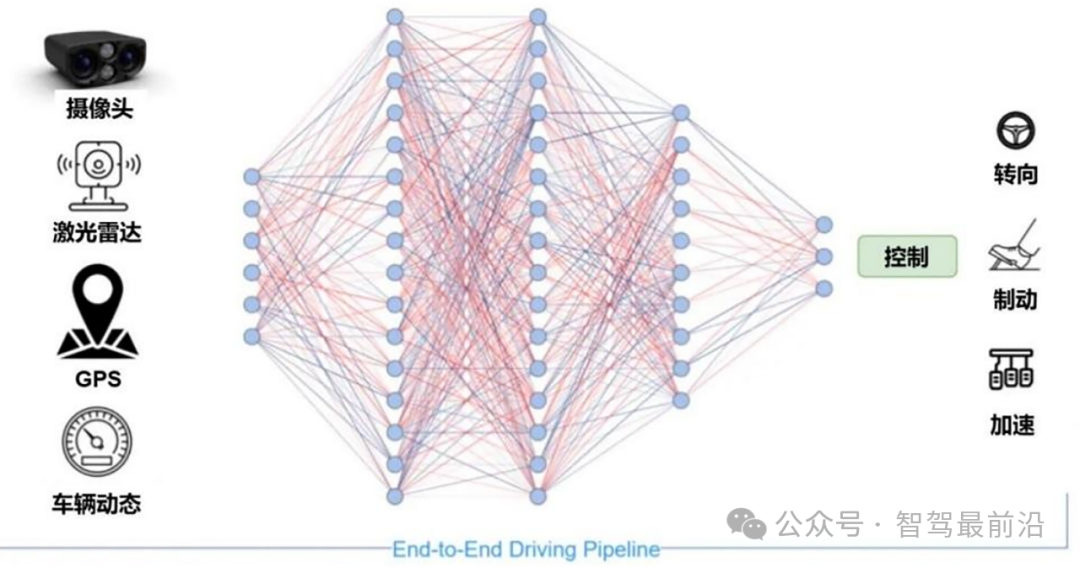
Narrow End-to-End Autonomous Driving Architecture
Broad end-to-end allows for the retention of manually set interfaces between perception, decision-making, and planning modules to achieve phased processing. Although retaining some modular features, the broad end-to-end approach also leverages the end-to-end learning capabilities of neural networks, reducing information loss through the design of feature vectors between modules. This design reduces algorithm complexity while ensuring data transmission accuracy and overall system performance to a certain extent. This broad architecture lays the foundation for the transition to end-to-end systems and provides higher flexibility for large-scale applications.

Broad End-to-End Autonomous Driving Architecture
1.2 Advantages of End-to-End Architecture
End-to-end technology is favored in the field of intelligent driving due to its advantages in information transmission efficiency, system computational performance, and generalization ability. In traditional modular solutions, frequent data transfer between perception, decision-making, planning, and control affects the system's response speed and real-time performance, with cumulative errors and information loss during multiple conversion processes.
The end-to-end architecture significantly reduces information transmission loss. By using a single neural network model, sensor data can be directly used for control decisions without multiple conversions, effectively reducing information loss and delay during module-to-module transmission. Additionally, the end-to-end system simplifies the system architecture by reducing the number of sub-modules in modular designs, contributing to lower power consumption and volume of the vehicle's computational system, making it more suitable for large-scale commercial production.
The end-to-end architecture also excels in system computational efficiency. By eliminating the need for layered processing across multiple modules and adopting deep learning neural networks for global optimization of perception, decision-making, planning, and control, the end-to-end architecture significantly improves information processing speed compared to traditional systems. Furthermore, the end-to-end system's ability to efficiently learn and adapt to new scenarios significantly enhances its generalization ability. Deep learning models based on neural networks adaptively learn from massive data, making end-to-end models more resilient than traditional rule-driven modular solutions in unfamiliar or extreme environments.

Technical Architecture and Implementation Methods
2.1 Three-Stage Architecture of End-to-End
The implementation of end-to-end systems typically spans three stages: perception "end-to-end," modular "end-to-end," and OneModel (single model) end-to-end. These stages represent the gradual maturation of end-to-end technology converging towards a single model.
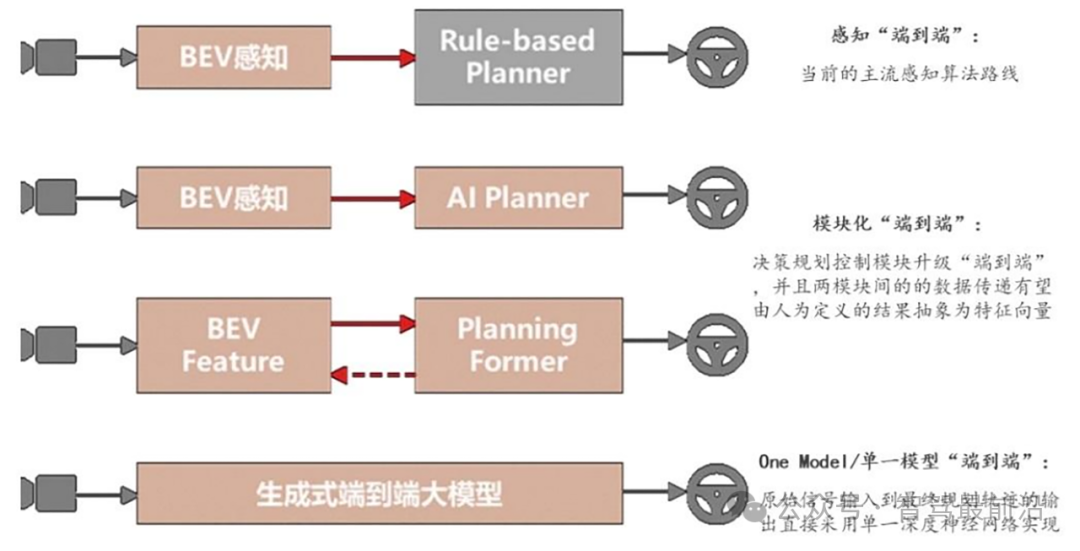
Evolution Diagram of End-to-End Autonomous Driving Architecture
Perception "End-to-End": In the initial implementation of end-to-end technology, the perception module is the primary application scenario for end-to-end neural networks. This stage utilizes neural network models based on multi-sensor fusion to process perception tasks, enabling multi-dimensional data fusion and deep feature extraction. A common approach is to use a Bird's Eye View (BEV) combined with a Transformer structure to model the overall scene features, achieving precise object detection and obstacle recognition. Currently, perception "end-to-end" is the most widely applied end-to-end solution in the industry, with significant technical maturity in the field of autonomous driving perception.
Modular "End-to-End": Building upon perception end-to-end, decision-making and planning modules are gradually introduced into the neural network model, forming a modular end-to-end system. At this stage, the control module no longer relies on traditional rule-based designs but generates control decisions through deep learning models. To avoid data transmission loss between perception and control, feature vectors are used for data exchange between modules. Modular end-to-end achieves coordinated and lossless data transfer between perception, decision-making, and planning, marking a transition phase towards integrated end-to-end systems.
OneModel End-to-End: The ultimate form of the end-to-end system employs a single neural network model to output vehicle motion trajectories from sensor data inputs. OneModel achieves module fusion in its architecture, breaking down the boundaries between perception, decision-making, and planning, and directly outputs path planning results. This model is primarily trained using reinforcement learning and imitation learning techniques, avoiding human rule intervention through automated data feature learning. OneModel end-to-end represents the ideal state of end-to-end technology, offering higher system integration and global optimality.
2.2 Imitation Learning and Reinforcement Learning
In the training of end-to-end systems, imitation learning (Imitation Learning) and reinforcement learning (Reinforcement Learning) are the mainstream neural network training methods. Imitation learning teaches neural networks optimal driving strategies by mimicking expert driving behavior. Algorithms such as behavior cloning (Behavior Cloning) and inverse optimal control (Inverse Optimal Control) are used, with the primary goal of inputting human expert driving data and allowing the model to learn optimal response strategies in different driving environments. The advantage of imitation learning lies in its straightforward learning process, but it is highly dependent on data and prone to generalization issues in complex scenarios.
Reinforcement learning optimizes driving strategies through trial and error by constructing reward functions and environment models. Compared to imitation learning, reinforcement learning demonstrates stronger adaptability in end-to-end technology. By designing reasonable reward functions, reinforcement learning can enhance the model's ability to handle complex scenarios through continuous training. However, the challenge lies in accurately defining reward functions to adapt to changes in various environments such as roads, weather, and vehicle dynamics.
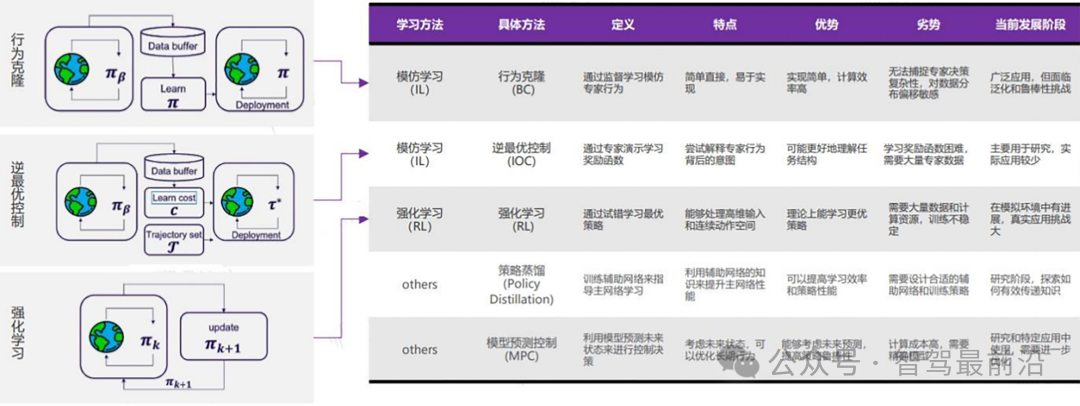
Basic Training Methods Behind End-to-End Autonomous Driving

Value and Advantage Analysis of End-to-End Technology
3.1 Global Optimization and System Efficiency
End-to-end systems achieve global optimization from perception to decision-making, offering significant advantages over traditional solutions in overall system performance and computational efficiency. In traditional modular designs, complex intelligent driving tasks require multiple information transfers between modules, necessitating extensive interface design and resulting in information transmission loss. The end-to-end architecture processes data from input to output in a single pass through deep neural network models, enabling optimal calculations centered around the ultimate control objective.
In terms of system computational efficiency, the end-to-end architecture integrates different modules into a single neural network model by compressing distributed computations across multiple tasks, significantly reducing computational resource consumption and enhancing system efficiency. Especially during control execution, the end-to-end architecture quickly responds to changes in the external environment and generates real-time driving instructions, achieving high response speeds. Furthermore, with neural network models at its core, the overall computational architecture of the end-to-end system can be more compact, providing a lightweight and low-power solution for vehicles on the road, contributing to lower hardware costs.
3.2 Lossless Information Transmission and Generalization Ability
Although traditional modular architectures are stable and interpretable, their multi-module segmentation leads to information loss and delay during transmission, with errors accumulating between modules, affecting the system's overall performance. The end-to-end architecture achieves lossless information transmission by avoiding intermediate data conversion, effectively improving system accuracy and reliability.
3.3 System Simplification and Reliability Enhancement
Another significant advantage of the end-to-end architecture over traditional modular architectures lies in system simplification. Traditional autonomous driving systems include modules for perception, decision-making, planning, and control, with each module processing part of the information independently and relying on the output of the previous module. However, this layered transmission model can lead to information lag and error accumulation in practical applications, ultimately affecting system real-time performance and safety. The end-to-end system directly converts input data into control signals through a unified neural network architecture, eliminating the need for intermediate modules. This not only reduces complex interface designs but also makes the system easier to maintain and update.
Additionally, the reliability of end-to-end systems has been significantly improved. As the end-to-end architecture is directly trained on large-scale datasets using deep learning algorithms, it can adapt to various scenarios and environmental changes, transcending predefined rules and demonstrating strong environmental adaptability. Especially in extreme weather conditions, complex road situations, and sudden traffic events, the end-to-end system can make rapid decisions based on learned comprehensive features, enhancing driving safety on unstructured roads. This flexibility and robustness make end-to-end technology valuable in the future popularization of autonomous driving.

Market Progress and Industrial Applications
4.1 Academic Research Progress
In recent years, the application of end-to-end technology in the field of intelligent driving has gradually deepened, with many academic studies and technical papers exploring the architecture, algorithm optimization, and training methods of end-to-end systems. For example, the UniAD model proposed by the Shanghai AI Laboratory won the Best Paper Award at the 2023 CVPR conference. The UniAD model employs a joint optimization framework based on multi-task learning, enhancing system efficiency and safety in end-to-end path planning by integrating tasks such as perception, prediction, and planning.
The core architecture of the UniAD model is based on Transformer, enabling effective processing of various input data. During feature extraction, modules such as TrackFormer, MapFormer, and MotionFormer are designed to achieve a comprehensive understanding of dynamic traffic elements, road information, and vehicle interactions. Notably, the model integrates traditional modular planning algorithms into a unified end-to-end network framework, ultimately generating vehicle trajectories and planned paths, ensuring driving safety through collision checks. The innovation of UniAD lies in its combination of multi-task learning and end-to-end optimization, providing strong support for the realization of end-to-end intelligent driving and laying a theoretical foundation for future practical applications.
4.2 Industrial Application Cases
The industrial application of end-to-end technology primarily focuses on leading smart car manufacturers and technology companies. In recent years, companies such as Tesla, XPeng, and Li Auto have invested in the development and application of end-to-end technology, initially implementing some end-to-end architecture functions in mass-produced models.
Tesla: Tesla introduced an end-to-end architecture in its latest FSD (Full Self Driving) V12 version to simplify the control path of the autonomous driving system. The FSD V12 version employs a fully end-to-end neural network model that directly generates control signals from camera image inputs. This model significantly improves the vehicle's decision-making speed and responsiveness, avoiding system delays due to redundant conversions in traditional modular solutions. Tesla's internal testing has shown that FSD V12 offers higher path planning accuracy and stable urban road driving capabilities.
XPeng Motors: XPeng's XNet system is based on the BEV (Bird's Eye View) perception model, combined with an end-to-end architecture design, converting camera input data directly into detection results in 3D space. Unlike traditional solutions, the XNet system significantly reduces manual rules in its design, completing perception and planning tasks directly through an end-to-end model. XPeng's end-to-end architecture has demonstrated excellent performance in road tests in multiple cities and exhibits notable advantages in system stability and handling complex road conditions.
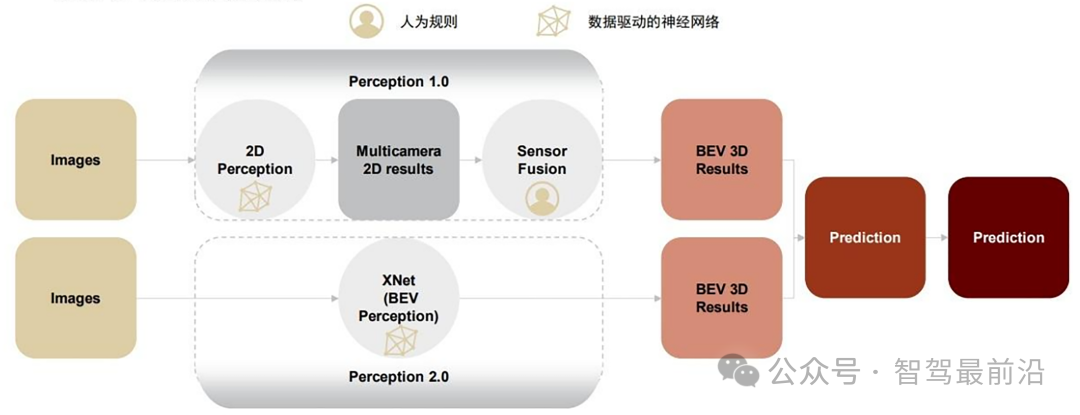
XPeng Motors' End-to-End Architecture
Li Auto: Li Auto has adopted an enhanced version of the end-to-end architecture, combining BEV and vision models to achieve comprehensive control from perception to planning. Li Auto's system features "Mapless Driving," capable of generating road planning through real-time camera input without high-precision maps, making it highly adaptable to varying road environments. The system has undergone practical road tests in multiple cities, demonstrating high safety and stability, showcasing the reliability of end-to-end technology in complex environments.

Key Drivers and Challenges
5.1 Data and Computational Power Requirements
End-to-end technology demands significant data and computational power. The core of the end-to-end model is a deep neural network, requiring vast amounts of training data for generalization and precision. For advanced autonomous driving, vehicles must collect rich data from various real-world scenarios, weather conditions, and lighting to ensure stable operation across environments. However, data collection and annotation are costly, and data privacy and security concerns must be addressed. In terms of computational power, end-to-end models often involve numerous parameters and multi-layer neural network structures, especially when integrating perception, planning, and control modules, significantly increasing computational demands. Vehicle manufacturers must invest heavily in building and maintaining high-performance computing infrastructure. Tesla, for example, employs a high-performance computing platform based on NVIDIA and in-house chips for autonomous driving training, supporting large-scale end-to-end model training. Additionally, the combination of cloud and edge computing is seen as a potential solution to address computational bottlenecks, enabling efficient real-time data processing and model updates.
5.2 Interpretability and Safety Concerns
The "black box" nature of end-to-end models poses interpretability challenges. Since end-to-end systems directly generate control commands from input data, their internal decision paths are difficult to interpret and validate, especially under extreme conditions. To ensure safety and reliability, the industry is exploring methods to enhance model interpretability. For instance, some research introduces rule-based auxiliary modules into end-to-end systems, providing more interpretable information at critical decision points. Additionally, data analysis and visualization techniques showcase the model's internal features, aiding developers in understanding its workings.

Industry Opportunities and Future Prospects
6.1 Opportunities for Vehicle Manufacturers
End-to-end technology presents new opportunities for vehicle manufacturers. With increasing demand for high-level autonomous driving, manufacturers must not only possess hardware manufacturing capabilities but also build autonomous intelligent driving algorithm systems. Leading automakers like Tesla, Li Auto, and XPeng have invested heavily in end-to-end technology research and gradually established their technical advantages. In the future, the end-to-end architecture is expected to become the mainstream solution for smart cars, enhancing manufacturers' competitiveness and improving user driving experiences. For example, Tesla's end-to-end FSD system enables highly automated urban driving, significantly attracting user attention.
Commercially, end-to-end technology reduces system development and maintenance costs, supporting rapid deployment of intelligent driving for vehicle manufacturers. Manufacturers can achieve uniform vehicle upgrades through end-to-end systems, minimizing hardware changes and enhancing system scalability and flexibility. In the future, the end-to-end architecture could become a core technology in smart car development, enabling manufacturers to dominate the technical competition.
6.2 Role of Component Suppliers
The realization of the end-to-end architecture relies not only on vehicle manufacturers' R&D investments but also on the crucial role of component suppliers. End-to-end technology necessitates an upgrade in the E/E (Electrical/Electronic) architecture and support from high-performance computing chips and sensors. For example, suppliers like Desay SV Automotive and Horizon Robotics are providing more powerful domain controllers for in-vehicle computing to meet the high computational demands of end-to-end systems. Meanwhile, perception hardware suppliers such as Velodyne and Luminar offer advanced sensor solutions for end-to-end systems. The end-to-end system demands a highly integrated E/E architecture, requiring component suppliers to provide more coordinated hardware architectures and data acquisition solutions to ensure reliable performance. As end-to-end technology gains popularity, the supply chain will face immense market demand, particularly in data transmission, computational chips, and sensors. For suppliers, deep involvement in intelligent driving system development can significantly enhance their market competitiveness and facilitate the full implementation of end-to-end systems.

Conclusion and Outlook
As a significant transformation in autonomous driving, end-to-end technology is accelerating the realization of high-level autonomous driving. Compared to traditional modular architectures, end-to-end systems excel in information transmission efficiency, computational performance, and system simplification. Despite challenges in data requirements, computational pressure, interpretability, and safety, their globally optimal and lossless transmission characteristics position them for future dominance. In the future, with further maturation of underlying AI technology, end-to-end systems are expected to make breakthroughs in the implementation and popularization of intelligent driving functions. Collaboration between vehicle manufacturers and component suppliers will drive the development of the end-to-end architecture, ushering in new business models and market opportunities in intelligent driving. Additionally, the improvement of policies, regulations, and industry standards will safeguard the commercialization of end-to-end technology, promoting its full implementation.
-
![]()
Domestic Smartphone Brands Hike Prices Collectively: The Age of Affordability Draws to a Close
-
Alibaba and Baidu Hike Prices for AI Computing and Storage Products by Up to 34%
-
Underestimated Trillion-Dollar Track: Why Autonomous Buses Will Lead in Commercialization?
-
Hot Topic | New Trends from AWE 2026: Humanization of Home Appliances and Integration of Robots into Home Life
-
Hot Topic | Exploring New Avenues at AWE 2026: The Humanization of Home Appliances and the Integration of Robots into Daily Life
-
![]()
Trillion-Dollar Market: Nvidia's Rising Anxiety
-
Trillion-Dollar AI Market: Nvidia's Growing Anxiety
-
![]()
In-Depth: The Two Sessions Set a Trillion-Yuan Target, Beidou is Reshaping New Growth and Underlying Narratives