What is Robustness, Often Mentioned in Autonomous Driving?
 01/02 2025
01/02 2025
 789
789
With the rapid evolution of autonomous driving technology, robustness has emerged as a pivotal metric for evaluating autonomous driving systems. In introductions related to autonomous driving, robustness is frequently used to describe certain functionalities. A robust system maintains stable operation amidst complex and fluctuating environments, a crucial requirement for transitioning autonomous driving from technical validation to practical implementation. However, the concept of robustness may seem abstract to many, and its specific manifestations, technical implementations, and challenges in autonomous driving merit exploration.

What is Robustness?
Originating from control engineering and computer science, the term 'robustness' refers to a system's ability to demonstrate stability and reliability under uncertain conditions. In simple terms, robustness encapsulates a system's capacity to maintain normal functionality amidst external interference, unexpected situations, or extreme conditions.
1. The Significance of Robustness in General Systems
In engineering, robustness is integral to system design. A robust system can handle a myriad of potential contingencies, such as hardware aging, environmental changes, or unexpected inputs. For instance, an umbrella that functions well in ordinary rain but fails in a storm lacks robustness. Conversely, an umbrella that remains stable in strong winds, keeps rain out, and functions seamlessly with varying wind speeds exemplifies high robustness.
2. The Relationship Between Robustness and Autonomous Driving
In autonomous driving, robustness primarily manifests in scenarios where the vehicle operates safely and stably despite uncertain conditions, including complex road conditions, weather changes, sensor failures, etc. While an autonomous vehicle might perform well on a sunny highway, its ability to continue safely navigating during sudden heavy rain, heavy snow, camera blur due to dirt, or GPS signal loss hinges on its robustness level.

The complexity of autonomous driving lies in integrating robustness across multiple stages: perception, decision-making, control, and communication. These modules must not only be robust individually but also coordinate effectively. In the event of local issues, compensation mechanisms ensure overall stable operation.
3. Key Dimensions of Robustness
When discussing robustness, its specific manifestations are typically considered from multiple dimensions:
1) Environmental Adaptability
Autonomous vehicles must navigate various road and weather conditions, from sunny days to foggy conditions with limited visibility, and from dry asphalt roads to muddy country lanes. The system's performance must remain reliable.
Consider an autonomous vehicle driving through a tunnel where light suddenly dims. Ordinary cameras might not adjust exposure swiftly, resulting in lost or overly dark images. A lack of robustness could lead to erroneous judgments and misoperation. Conversely, a robust system would utilize infrared sensors or LiDAR to supplement environmental information, ensuring a clear view of the road ahead even in darkness.
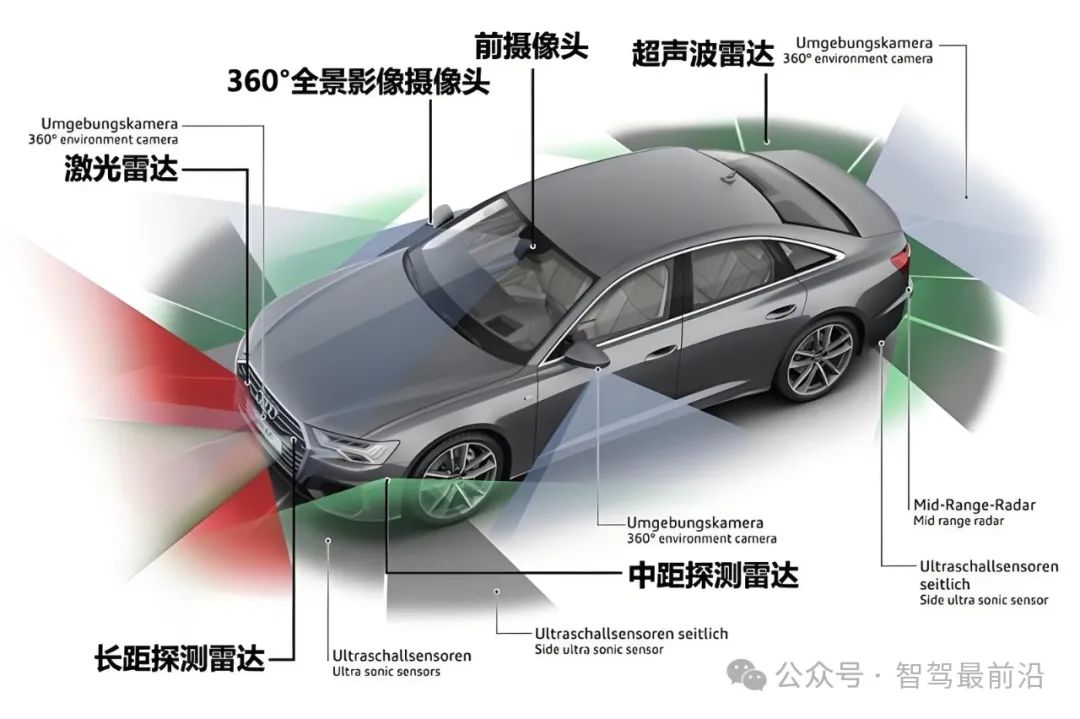
2) Sensor Data Fault Tolerance
Autonomous driving systems rely on data from multiple sensors, including cameras, LiDAR, and millimeter-wave radars. However, these sensors can provide erroneous or incomplete data due to physical obstructions, hardware failures, or environmental noise. Robustness is demonstrated when the system compensates for individual sensor deficiencies through data fusion or redundancy mechanisms, producing stable and reliable environmental perception results.
During snowy weather, LiDAR may become obstructed by snow, reducing scanning accuracy. A robust system would prioritize data from millimeter-wave radars, combined with camera information, to recalculate the position of obstacles on the road ahead, ensuring accurate perception results.
3) Algorithm Anti-Interference Ability
Autonomous driving algorithms must contend with potential external interferences. Extreme lighting conditions, for instance, can mislead image recognition algorithms or even succumb to adversarial sample attacks. Robust algorithms mitigate the impact of interference on system operation through diverse training, reinforcement learning, and real-time strategy adjustments.
For example, using artificially generated adversarial images to test autonomous driving systems, subtle changes to traffic sign patterns can trick algorithms into misidentifying a 'stop sign' as a '40 km/h speed limit' sign. A less robust system might misjudge directly, whereas a robust algorithm would verify sign content through multiple sources (like high-precision maps) to avoid errors.
4) System Stability and Redundancy
In autonomous driving, any hardware or software failure can lead to system crash. A robust system maintains functional stability through redundancy design and fault tolerance mechanisms during local failures.
If an autonomous vehicle's main control unit temporarily fails due to overheating during driving, a system with a backup control unit (redundancy control) can swiftly take over, preventing accidents due to single-point failures. This embodies strong robustness.
4. The Difference Between Robustness and Traditional Reliability
While robustness and reliability may seem linguistically similar, they differ distinctly. Reliability emphasizes the system's ability to operate normally in expected environments, whereas robustness highlights the system's adaptability in unexpected or extreme conditions. For instance, car windshield wipers demonstrate reliability on sunny and lightly rainy days but show robustness in clearing heavy rainwater and withstanding storms.
5. Why is Robustness Important in Autonomous Driving?
Robustness in autonomous driving systems directly impacts driving safety and user experience. Autonomous vehicles face far more complex and variable environments than traditional vehicles. Any sensor data loss or algorithm error can have severe consequences. A robust system ensures high-quality decision-making and control capabilities in diverse scenarios, paving the way for large-scale commercialization of driverless vehicles.
By integrating robustness, autonomous driving systems not only adapt reliably to current technological limitations but also ensure passenger and road user safety in emergencies, a core goal of technological R&D in this field.

Specific Manifestations of Robustness in Autonomous Driving
1. Robustness in the Perception Layer
The perception layer, foundational to autonomous driving systems, collects and analyzes external environmental data, including roads, obstacles, traffic signs, and pedestrians.

1) Multi-Sensor Data Fusion Capability
Autonomous driving relies on various sensors, but single-sensor data can deviate or be lost due to interference, malfunctions, or other factors. A robust perception system utilizes multi-sensor data fusion to enhance accuracy and reliability through sensor complementarity.
For example, in heavy rain, cameras might not clearly identify lane lines due to blurriness, while LiDAR and millimeter-wave radars provide accurate obstacle distance information. A robust system combines LiDAR point cloud data with millimeter-wave radar speed measurements to compensate for camera deficiencies, ensuring accurate obstacle detection.
2) Adaptability to Extreme Environments
Perception systems must adapt to extreme environments like bright light, heavy fog, dust storms, or low light conditions at night. More robust systems incorporate multi-modal perception technologies, like infrared sensors or high-precision maps, working in tandem with traditional visual systems to compensate for single-mode limitations. Through multi-modal perception, autonomous driving systems maintain high-precision capabilities even in poor lighting.
2. Robustness in the Decision-Making Layer
The decision-making layer analyzes perception data, generating driving strategies and path planning. Robustness here is demonstrated by handling complex scenarios, uncertainties, and emergencies, ensuring vehicle safety and efficiency.
1) Adaptive Ability in Dynamic Environments
Autonomous vehicles encounter varied traffic conditions, like temporary constructions, sudden pedestrian crossings, or reckless driving. A robust decision-making system quickly identifies dynamic changes, adjusting strategies in real-time to avoid dangers.
2) Ability to Process Abnormal Data
The perception system may provide inconsistent or abnormal data. For instance, strong light reflection might mislead cameras, or GPS signal interference might cause positioning offsets. A robust decision-making system filters erroneous data through anomaly detection and redundancy techniques, ensuring accurate decision results.
3. Robustness in the Control Layer
The control layer converts decision-making strategies into operational instructions, directly controlling vehicle actions like acceleration, deceleration, and steering.
1) Adaptability to Dynamic Driving Conditions
Vehicles may encounter dynamic changes during driving, like wet roads or tire slippage. A robust control system responds swiftly, adjusting power distribution and braking force to ensure stability and safety.
2) Stability in Fault Situations
In hardware or communication failures, a robust control system activates redundancy mechanisms or safe modes to ensure vehicle controllability. For example, if an autonomous vehicle's primary braking system fails, a lack of robustness could prevent slowing down, leading to accidents. Conversely, a robust control system immediately activates the backup braking module for emergency braking, ensuring safety.
4. Robustness in System Architecture
Robustness permeates the entire autonomous driving system architecture, encompassing hardware redundancy, software fault tolerance, and security strategies.
1) Hardware Redundancy Design
A robust system incorporates redundancy in critical modules, like multiple power supplies and backup processors. Even if a module fails, the backup seamlessly takes over, preventing system collapse. For instance, if an autonomous vehicle's CPU fails due to overload, a robust design introduces a backup CPU to take over, ensuring continuous operation.
4) Software Fault Tolerance Mechanisms
A robust software system swiftly identifies issues and adjusts states upon malfunction or error. It uses task isolation to separate faulty sub-modules, preventing systemic spread. If an autonomous vehicle's path planning module delays due to algorithm conflicts in complex roads and the system lacks robustness, the delay might spread, causing collapse. Conversely, a robust design isolates the path planning module and continues operation using a backup algorithm, maintaining functionality.
Robustness in autonomous driving manifests from perception, decision-making, to control and system architecture. A robust system maintains high performance in complex environments, ensuring stability and safety through redundancy, data fusion, and fault tolerance. By enhancing robustness, autonomous driving technology can achieve large-scale commercialization, gaining social trust and widespread acceptance.

Specific Implementations of Robustness Technology
1. Redundancy Design
Redundancy design stands as a cornerstone of enhancing system robustness, primarily achieved by deploying multiple configurations at both hardware and software levels to ensure system stability amidst failures or unexpected events. The fundamental aim of this design approach is to preclude system failures caused by single-point malfunctions, thereby guaranteeing the safety and reliability of autonomous vehicles across diverse environments.

1) Hardware Redundancy
Hardware redundancy involves deploying multiple critical hardware components to ensure that the system can continue to gather essential data and function seamlessly even when a single component fails. In autonomous driving systems, perception layer devices such as LiDAR, cameras, and millimeter-wave radars often incorporate redundancy configurations. Additionally, autonomous vehicles often feature dual power supplies for their batteries or power management systems. If the primary power supply malfunctions, the backup power supply seamlessly activates, ensuring uninterrupted power to the vehicle. Numerous high-end autonomous vehicles also utilize multiple ECUs to share computational tasks, allowing the backup ECU to promptly take over if one ECU fails, thus preventing system shutdown. This hardware redundancy design substantially boosts the system's tolerance to hardware failures, providing a vital safeguard for robustness.
2) Software Redundancy
Apart from hardware redundancy, software redundancy is another essential aspect of robust design. By establishing multi-layered backup mechanisms within algorithms and program execution, software redundancy ensures that if the primary algorithm or program fails, a backup can swiftly assume control of system operations.
Primary and Backup Algorithm Switching Mechanism
In autonomous driving decision-making algorithms, the primary algorithm typically handles real-time path planning, speed control, and obstacle avoidance. However, under extreme conditions, such as abnormal inputs, data loss, or algorithm errors, the primary algorithm may malfunction. To prevent the vehicle from entering a dangerous state due to algorithm failure, the system pre-deploys a backup algorithm. Upon primary algorithm failure, the backup algorithm immediately takes over vehicle control, ensuring system continuity and safety.
Multiple Applications of Fault Tolerance Mechanisms
Software redundancy also manifests in the system's multi-layered fault tolerance mechanisms. For instance:
- Real-time Monitoring Module: By monitoring the primary program's running status, the system immediately initiates the backup program or enters safe mode (e.g., automatic deceleration or stopping) upon detecting an anomaly.
- Multi-Algorithm Collaboration: In complex decision-making scenarios, different algorithms run in parallel and cross-verify each other to ensure the accuracy and reliability of the final decision. For example, a rule-based algorithm and a learning-based algorithm can run concurrently and compare results during decision-making.
Through the harmonious integration of hardware and software redundancy, autonomous driving systems maintain high robustness across diverse unexpected situations, providing robust support for system reliability.
2. Robustness Training and Testing
Enhancing robustness necessitates not only systematic design but also targeted training and testing. Through extensive scenario simulations and data augmentation techniques, the system can optimize its performance across various conditions, better preparing it to handle complex real-world scenarios.
1) Simulation Testing of Extreme Scenarios
In the development of autonomous driving technology, simulating extreme scenarios is vital for verifying system robustness. These scenarios often exceed regular driving conditions, encompassing rapid lighting changes, sudden road obstacles, extreme weather, complex urban traffic, and unexpected highway obstacles. By testing these scenarios, the system identifies weaknesses and continuously refines algorithms.
2) Data Augmentation Techniques
Data augmentation enhances autonomous driving algorithms' adaptability to diverse real-world scenarios by diversifying training data. This technique effectively compensates for the lack of actual data and markedly improves system performance in complex environments.
Common Data Augmentation Methods
- Image Transformation: Rotate, blur, scale, or add noise to camera images to simulate visual data under varied angles, clarities, and environmental conditions.
- Weather Condition Simulation: Artificially generate image data for rainy, snowy, foggy, or low-light conditions to train the system's perception in adverse weather.
- Scenario Expansion: Combine real road data to create new virtual scenarios, such as adding road signs, dynamic pedestrians, or animals, to enrich the system's adaptability to different situations.
Advantages and Effects
- Enhances system performance in rare scenarios, like extreme weather or special terrains.
- Reduces reliance on real road testing, significantly lowering testing costs.
- Increases training data diversity, rendering algorithms more robust and universal.
Through simulation testing and data augmentation, autonomous driving systems continuously optimize their performance in complex and dynamic environments, laying a solid foundation for achieving robustness.

Industry Significance of Robustness
In the development and application of autonomous driving technology, robustness has emerged as a core criterion for assessing system reliability and safety. Its importance transcends the technical realm, impacting commercialization, regulatory formulation, market competition, and user trust.

1. Enhance System Safety
Autonomous vehicles navigate complex and dynamic road environments, including severe weather, sudden situations, and unpredictable human behavior. Robustness directly correlates with the system's safety performance in these environments. Robust design ensures stable operation under abnormal conditions. For instance, in extreme weather (like heavy rain or dense fog), an autonomous vehicle's sensors might experience interference, leading to data collection deviations. Without robustness, the system might lose control or make erroneous decisions. Robust technology enables the system to rely on multi-source information fusion or redundant algorithms to make safe decisions amidst partial or abnormal sensor data, averting accidents.
2. Accelerate Commercialization
The ultimate goal of autonomous driving technology is widespread commercial application, with robustness playing a pivotal role.
- Enhance Reliability to Meet Market Demand: In commercial settings, autonomous vehicles operate globally, encountering significant variations in roads, regulations, cultures, and climates. For example, a Robotaxi must operate smoothly during Beijing's peak hour congestion and ensure driving safety on snowy Midwestern U.S. roads. Only with sufficient robustness can autonomous systems adapt to diverse application scenarios, gaining market recognition and promotion.
- Reduce Commercial Risks: Autonomous driving technology involves substantial commercial risks, including potential technical failures, traffic accidents, and user complaints. Robust systems mitigate these risks through stable performance. For instance, an autonomous trucking company deploying highly robust vehicle systems on freight routes not only reduces accident rates but also earns customer trust, further expanding market share.
3. Promote Regulatory Formulation and Standardization
- Become the Basis for Technical Certification: Globally, autonomous driving technology must adhere to a suite of safety and performance certification standards. Both the U.S. National Highway Traffic Safety Administration (NHTSA) and the European New Car Assessment Program (Euro NCAP) mandate a certain level of robustness for autonomous systems to operate stably under varied conditions. These standards aim to ensure passenger and road user safety, with robustness serving as a vital prerequisite.
- Facilitate Industry Standardization: Currently, the autonomous driving industry is in a phase of both competition and cooperation, with significant differences in technical paths and solutions among companies. Breakthroughs in robustness technology provide industry benchmarks, promoting standardization in areas like perception algorithms, decision-making mechanisms, and redundancy design. For example, a robust solution for LiDAR and camera data fusion could become an industry standard for sensor design, guiding equipment manufacturers and technology developers.
4. Enhance User Trust
The widespread adoption of autonomous driving technology hinges on public trust, with robustness directly influencing users' sense of security and system dependence.
- Reduce User Concerns about Technical Failures: Many users lack trust in autonomous vehicles due to fears of technical failures. Poor system performance in extreme scenarios exacerbates user distrust. For example, early accidents involving autonomous vehicles due to camera malfunctions sparked public doubts about technology safety. By improving robustness, autonomous systems can handle complex environments more stably, significantly alleviating user concerns.
- Provide a Better Riding Experience: Robustness impacts not only safety but also user experience. In complex traffic, a robust system responds swiftly, offering a smooth driving experience and enhancing user satisfaction. Advanced autonomous vehicles employ dynamic programming and robust control algorithms to ensure smoother performance during sudden braking, acceleration, and lane changes, providing a more comfortable ride for passengers.
5. Enhance Corporate Competitiveness
Breakthroughs in robustness technology confer a competitive edge, positioning companies favorably within the industry.
- Manifestation of Technological Differentiation: Autonomous driving industry competition is fierce, with companies striving for market dominance through technological differentiation. Robustness serves as a key indicator. For instance, an autonomous driving company deploying highly robust systems in rainy regions addresses technical challenges faced by competitors in these scenarios, thereby dominating the market.
- Promote Cross-Industry Collaboration: Robustness's technical advantages can foster collaboration between autonomous driving companies and other industries. Highly robust autonomous vehicles can forge deep partnerships with logistics firms and taxi companies, jointly promoting new business models. This collaboration not only expands application scenarios but also generates additional revenue streams for companies.
Robustness technology is not only a core guarantee for autonomous driving system safety and reliability but also a crucial driver of industry development. It plays a vital role in enhancing safety, accelerating commercialization, promoting regulatory formulation, boosting user trust, and improving corporate competitiveness. With continuous technological advancements, robustness will become a pivotal factor driving the autonomous driving industry's transition from R&D to large-scale application, steering the industry towards a more mature and prosperous future.

Conclusion
As a vital attribute of autonomous driving systems, robustness permeates perception, decision-making, and control. It not only reflects system performance but is crucial for autonomous driving maturity and adoption. In the future, with algorithm optimization, hardware upgrades, and regulatory enhancements, robustness will emerge as a key driver propelling autonomous driving development. In this technological revolution, those who create more robust autonomous driving systems will ascend to the pinnacle of industry development.
-
![]()
Hardware is the skeleton, AI is the soul, and data integrates the two
-
![]()
China’s AI Industry: A Unified Pivot Towards Monetization?
-
![]()
New Progress! Infineon Completes Acquisition of ams OSRAM's Non-Optical Sensor Business
-
![]()
35 Million Bet on an Optical Future! Tengjing Technology Makes a Move in AR
-
![]()
Why World Models Get Stuck on Construction Roads in Autonomous Driving Applications
-
Alibaba Initiates Cultural Transformation: Is Jack Ma Making a Strategic Comeback?
-
Tianfeng Heads to Hong Kong for IPO with RMB 3.8 Billion in Funds: Xingyu's Cross-Border Foray into Embodied AI Faces Uncertain Future
-
![]()
Mengshi Auto’s High-End Aspirations Dashed: Huawei Partnership Fails to Revive Sales, New Model’s Entry Price Dips Below 300,000 Yuan