Distinguishing "Decision Making" and "Planning" in Autonomous Driving
 05/28 2025
05/28 2025
 615
615
In the overarching structure of an autonomous driving system, "decision making" and "planning" often appear together, yet each plays a distinct yet intertwined role. Imagine a car navigating to its destination; decision making is akin to a driver choosing actions based on road conditions, traffic rules, and travel needs—such as "where to go," "when to change lanes," and "whether to overtake." Planning, on the other hand, computes the optimal route and driving method to ensure a smooth and safe journey. For autonomous driving to be both intelligent and dependable, these two components must function independently and in harmony.
Conceptually, decision making (Decision Making) answers the question "what to do." After the perception module identifies the surroundings, the decision-making module integrates high-precision maps, traffic rules, the dynamics of surrounding vehicles and pedestrians, and passenger intent to determine the next action—like going straight, entering a left-turn lane, following the vehicle ahead, overtaking, or stopping to yield. This process balances safety, efficiency, and comfort, weighing various possibilities to select the most appropriate action.
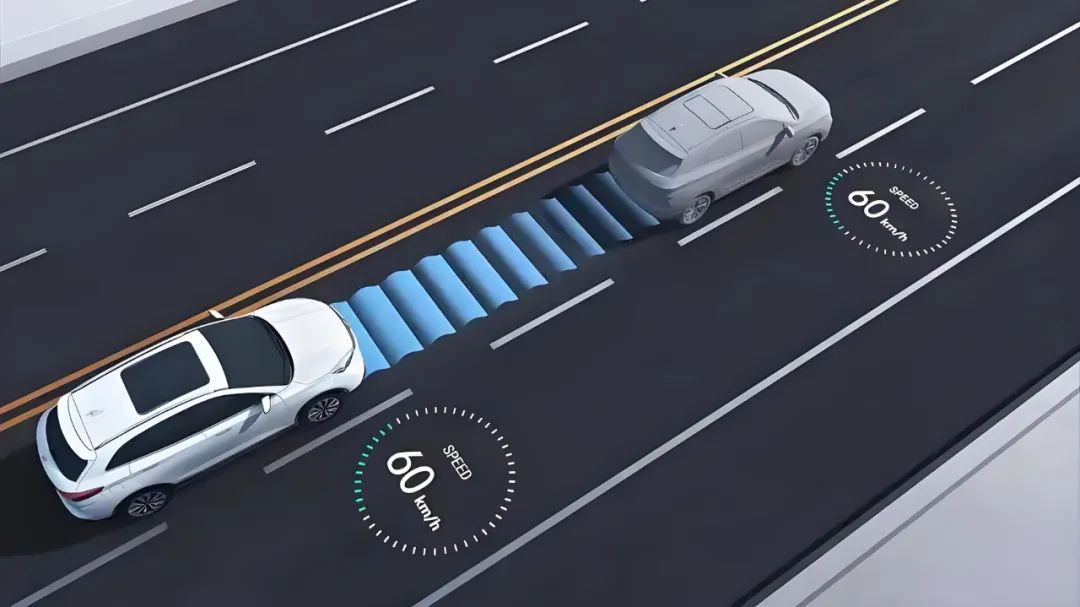
Planning, in contrast, addresses "how to do it." It comprises two levels: path planning and motion planning. Path planning outlines feasible trajectories within the two-dimensional road space that adhere to traffic rules, avoid obstacles, and follow lane lines. Motion planning introduces the time dimension, calculating speed, acceleration, and steering angles based on the vehicle's dynamics and comfort indicators to create a coherent spatio-temporal curve, adjusting it in real-time to handle emergencies. Simply put, decision making tells the vehicle "where to go," while planning charts a safe and smooth path to navigate "how to get there."
Separating decision making and planning serves several purposes. Firstly, it enables modular management. Decision making focuses on strategic choices, while planning centers on optimization algorithms and vehicle kinematics, each optimized and tested independently. Secondly, this layered approach facilitates flexible algorithm iteration. In engineering, a typical pipeline of perception → decision making → planning → control is adopted, with each stage operating under clear interfaces. This minimizes the impact of upgrades or algorithm improvements on other modules, making it easier to pinpoint issues and optimize performance.
If the decision-making module issues an unfeasible or unsafe instruction, planning may fail to generate a viable trajectory. Conversely, overly conservative planning can miss driving opportunities, reducing overall efficiency. For instance, when deciding to "overtake in 200 meters," if the planning algorithm reasonably abandons the plan due to speed differences or insufficient road width, a feedback mechanism must convey this to the decision-making layer for reassessment or strategy adjustment. This forms an upstream-downstream closed-loop collaboration.
With advancements in computing power and algorithms, the industry is exploring tighter integration of decision making and planning. End-to-End Learning merges perception, decision making, and planning into a single neural network, directly outputting control commands from raw sensor data. While effective in closed tests, it struggles with interpretability and safety verification for high-level autonomous driving. Hierarchical Reinforcement Learning treats high-level behavior decision making and low-level motion planning as subtasks, optimized jointly through a reinforcement learning framework. However, challenges remain in sample efficiency and online safety.
A more practical approach is to incorporate "feasibility feedback" and "dynamic review" mechanisms into the traditional scheme. When planning detects high risk or unfeasibility in the current decision, it automatically feeds back to the decision-making module, prompting it to reassess or trigger alternative strategies. This creates an elastic closed loop between decision making and planning, significantly enhancing adaptability to complex environments.
For an autonomous driving system, the quality of decision making ensures timely and reasonable tactical choices, while planning effectiveness impacts driving smoothness and energy efficiency. Slow decision-making may miss overtaking or merging opportunities, while overly conservative planning can lead to frequent deceleration and abrupt steering, affecting comfort and wasting energy. Only through full cooperation can both ensure safety while enhancing road traffic efficiency and ride experience.
As autonomous driving technology accelerates, the boundaries between modular integration of decision making and planning blur. End-to-end and layered hybrid architectures mature, incorporating more "empirical knowledge" into neural networks. To meet regulatory and industry traceability requirements, rule-based components and redundant safety mechanisms remain crucial. The ideal solution may be "hybrid intelligence," combining efficient learning networks in common scenarios with traditional rule-based and optimization modules in extreme or novel situations, allowing real-time switching and complementarity based on shared data and interfaces.
In summary, decision making and planning, though distinct, are pillars of the autonomous driving system. Ensuring their coordination and feedback during design, making decisions practical, and letting planning inform decision making continuously, ensures safety and efficiency in unpredictable road environments, propelling autonomous driving towards true maturity and widespread adoption.
-- END --
-
![]()
Market Share Dilemma: DJI vs. Insta360—Is It '40-40' or '60-30'?
-
![]()
Market Share Dilemma: DJI vs. Insta360 – A '40-40 Split' or '60-30 Split'?
-
![]()
It's Kunlunxin's Turn to Play
-
![]()
Is the New Performance Peak Just the Starting Point? What Will Be Crystal-Optech's Next Destination?
-
![]()
Goertek Pours 69 Million Yuan into Elite Precision: Ramping Up Optical Precision Manufacturing and R&D Capabilities
-
![]()
Avatr Attempts HKEX Listing Again, With 20,000 Vehicles Sold in First Five Months
-
![]()
NVIDIA Announces 10-Fold Production Capacity Increase in 2 Years, Disrupting the Energy Storage Industry
-
![]()
AI Enters the Second Half: Models Are No Longer Scarce, What’s Truly Scarce Are Computing Power, Scenarios, and Trust