Is Unprotected Left Turn in Autonomous Driving Still Difficult with End-to-End Technology? How Are Different Automakers Performing?
 05/25 2026
05/25 2026
 554
554
In the development of autonomous driving, unprotected left turns have long been considered a litmus test for whether a system can perform like a human. The term “unprotected” means the system can complete a left turn smoothly without the aid of lane markings. Some intersections lack dedicated left-turn signals, requiring the system to independently judge gaps in oncoming traffic and execute the turn.
This not only requires precise assessment of the distance and speed of oncoming vehicles but also constant vigilance for pedestrians and non-motorized vehicles that may appear from side streets. For early autonomous driving systems, such scenarios were nearly nightmarish, often resulting in vehicles hesitating indefinitely at intersections or being honked at by following drivers due to overly rigid decision-making.
With the widespread adoption of end-to-end technology, autonomous driving capabilities for handling unprotected left turns have undergone a qualitative leap. In simple terms, end-to-end technology involves directly inputting raw data—such as images from sensors and radar readings—into a unified neural network model, which then outputs driving commands. This approach breaks away from traditional architectures that divide perception, planning, and control into separate modules, enabling vehicles to behave more like seasoned drivers rather than novices relying on rote memorization of code. So, in the era of end-to-end technology, is unprotected left turn still difficult?
Why Were Previous Systems So Afraid of Left Turns?
Before end-to-end technology matured, autonomous driving systems primarily relied on manually programmed rules. Engineers had to write logical code for various possible scenarios, such as stipulating that the vehicle must stop and wait when an oncoming car is less than 30 meters away and traveling faster than 40 kilometers per hour. However, real-world unprotected left-turn intersections are extremely complex. Oncoming traffic might include slow-moving buses, electric bikes rushing through the intersection, or even instances where the opposing driver flashes their lights to yield the right-of-way.
Traditional systems struggle to adapt to these variables because rules are rigid and cannot account for all possibilities. When the system perceives even a slight uncertainty in the surrounding environment, it defaults to the most conservative strategy—coming to a complete stop—to ensure safety. While this approach is safe, it significantly reduces road efficiency and undermines the practicality of autonomous driving in complex urban environments. More critically, when multiple modules collaborate, information loss occurs during layer-by-layer transmission, causing the system to react to road conditions with a noticeable delay.
However, the practical performance of several automakers indicates that the modular architecture has been thoroughly disrupted. Take Huawei’s ADS 4.0/4.1 as an example. It employs a self-developed WEWA architecture, generating massive amounts of long-tail scenarios through a cloud-based world engine and combining them with an onboard world behavior model for unified decision-making. This system has achieved map-free coverage across all cities and townships in China. Vehicles equipped with this system have demonstrated a 98%–99.5% success rate for unprotected left turns in challenging road conditions, such as Chongqing’s 8D interchanges and Guangzhou’s urban villages, with human intervention required only 0.3–0.5 times per 100 kilometers—equivalent to needing manual control once every 200+ kilometers.
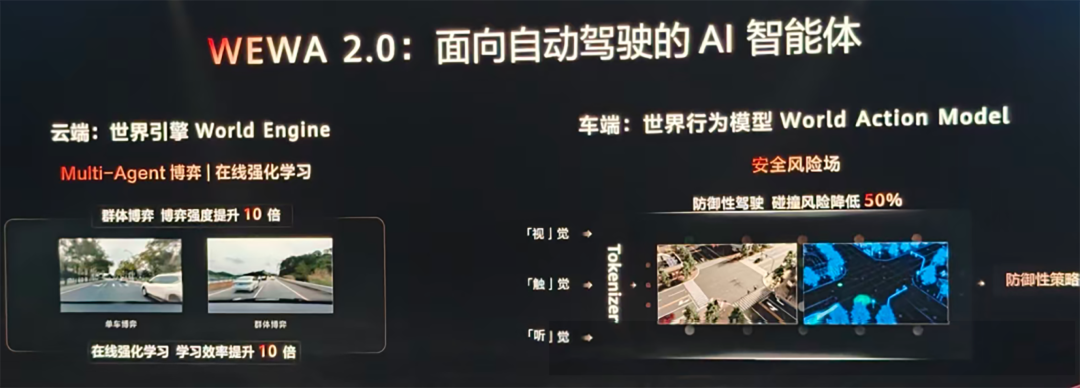
Image Source: Internet
Although Tesla’s FSD V14 faces localization challenges in China, globally, it has been rated as the best driver-assistance system of the year by MotorTrend in early 2026 North American testing, thanks to its pure vision-based end-to-end architecture. Its performance in complex urban scenarios, such as unprotected left turns and roundabout navigation, has significantly improved.
How Does End-to-End Technology Enable Vehicles to Find Opportunities?
In unprotected left turns, much critical information cannot be described by simple code-based rules. For example, an oncoming straight-moving vehicle may still be accelerating, but the rate of acceleration is slowing, suggesting the driver is not in a hurry to proceed. By learning from millions of real-world driving cases, end-to-end models develop a deep feature-mapping capability. They do not merely recognize objects but perceive intentions. The parameters within the neural network capture comprehensive changes in road surface lighting, vehicle posture, and environmental atmosphere—factors that are extremely difficult to quantify in traditional code but serve as crucial decision-making signals in end-to-end models.
The advantage of this technology lies in its strong associative and generalization abilities. When a vehicle encounters a deformed intersection it has never seen before, the end-to-end model does not fail due to the absence of matching rules. Instead, it automatically derives a driving trajectory based on tens of thousands of similar intersections learned previously. This approach more closely resembles human driving intuition. It understands a dynamic balance, knowing when to slightly probe ahead to claim space and when to yield the right-of-way. This flexible response enables vehicles to move beyond binary logical judgments when facing unprotected left turns, exhibiting a rhythmic driving style.
In 2026, companies have elevated this ability to find opportunities to new heights. Tesla’s FSD V14.3 version, fully rolled out in April 2026, features a completely reconstructed perception architecture, improving recognition accuracy for pedestrians, non-motorized vehicles, and traffic signs by 40%. The success rate for unprotected left turns has risen to 98%. The vehicle can now proactively predict the trajectories of electric bikes and bicycles and avoid them, eliminating the need for driver intervention in most urban road conditions.
XPENG Motors launched the XNGP 5.0 system in early 2026, equipped with a fully self-developed on-device large model that no longer relies on any preset map information, covering all counties and cities in China. At the perception level, this system no longer simply identifies traffic lights or lane markings but can infer that an intersection, despite faint markings, is likely a five-way intersection based on traffic trajectories and surrounding building layouts. This logical reasoning ability allows the vehicle to behave like an experienced driver during unprotected left turns—slowly extending its front end while observing oncoming traffic to find a reasonable, slightly strategic moment to proceed—with a success rate of approximately 92%.
Li Auto took a differentiated approach by overlaying a visual language model onto its end-to-end system, constructing the VLA Driver Large Model. In March 2026, it released the next-generation MindVLA-o1 foundational model, which uses 3D spatial understanding and multimodal thinking to enable vehicles to imagine future scenarios in a latent space, visualizing driving decisions and achieving more precise intention prediction.
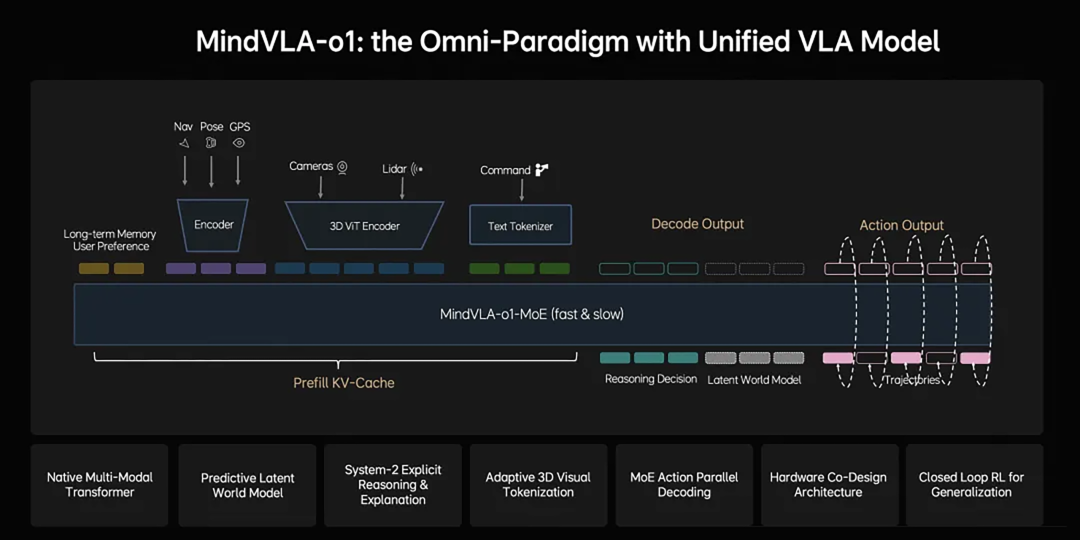
Image Source: Internet
Currently, the most representative global end-to-end application case is Tesla’s FSD V14 version. In this iteration, Tesla completely abandoned rule-based code in favor of full neural network control. According to real-world tests by multiple owners at busy U.S. intersections, vehicles no longer frequently slam on the brakes during challenging left turns, as was common in older versions. Instead, they smoothly navigate through gaps in straight-moving traffic and even inch forward cautiously when visibility is obstructed to expand their field of view. Such human-like maneuvers were unimaginable in the era of rule-driven systems.
In the Chinese market, on May 21, 2026, Tesla officially announced the launch of its supervised FSD in China, primarily featuring the V14 architecture and running on eight cameras paired with an end-to-end neural network. To facilitate localization, Tesla has established a full-link AI training center in Shanghai’s Lingang area, achieving 100% local storage, labeling, and training of Chinese user driving data. This setup specifically optimizes end-to-end performance for complex Chinese road conditions, such as electric vehicle weaving, unprotected left turns, and roundabout negotiations.
However, early tests by some media outlets reveal that the Chinese version of FSD still struggles with localization. At intersections without dedicated phases, FSD takes an average of 3.2 seconds to make decisions and often abandons left turns when oncoming traffic is dense. The measured success rate for unprotected left turns is 68%–70%, still noticeably lower than Huawei ADS’s 91%–99.5%.
Has Autonomous Driving Completely Solved This Challenge?
While end-to-end technology has made unprotected left turns significantly less difficult, achieving 100% perfection still requires time. Although neural networks are intelligent, they are essentially black boxes. When encountering rare extreme scenarios, such as construction zones with extremely poor lighting and chaotic traffic, whether the system can consistently make correct judgments still depends on feeding it even larger volumes of data. Moreover, the performance of end-to-end models heavily relies on the quality of training data. If the learning samples include uncivilized driving behaviors, the system may adopt some dangerous habits.

Image Source: Internet
According to the P3 China Intelligent Driving Evaluation Report released in April 2026, the Xiangjie S9T equipped with Huawei’s ADS 4.1 ranked first with a score of 4.46, followed by the XPENG P7 at 4.33 and the Li Auto i8 at 4.06. Huawei has topped this evaluation for three consecutive years.
Meanwhile, significant disparities remain in overall efficiency at complex intersections. Third-party early morning peak-hour tests in May 2026 showed that Xiaomi’s vehicle, equipped with the XLA Cognitive Large Model, took an average of 9.3 seconds to complete an unprotected left turn—1.8 seconds slower than XPENG’s XNGP but 0.4 seconds faster than Huawei’s ADS 5.0. Faster does not necessarily mean more stable, nor does slower imply inferior capability; the three technical approaches fundamentally differ in their definitions of efficiency.
Additionally, Baidu Apollo offers another perspective from the standpoint of L4 autonomous driving. Its self-developed Apollo ADFM Autonomous Driving Large Model, deployed in the sixth-generation driverless vehicle RT6, achieves safe navigation through complex intersections in fully autonomous mode by deeply synergizing perception and planning large models. Real-world testing shows its safety level is 10 times that of human drivers, and it has achieved full operational coverage in Wuhan.
Notably, from December 31, 2025, to January 1, 2026, Tesla’s FSD V14.2 completed the world’s first human-zero-intervention cross-country drive across the United States, covering approximately 4,400 kilometers in 2 days and 20 hours. The system autonomously handled all operations, including parking at Superchargers, across highways, urban roads, unprotected left turns, and construction detours—without any incidents. This milestone realized Elon Musk’s 2016 vision of enabling cars to traverse the U.S. independently, demonstrating that end-to-end technology has transitioned from laboratories to large-scale real-world validation.
The future development direction is to further enhance models’ predictive capabilities. Current systems primarily react based on immediate perception, whereas future end-to-end technology will feature stronger long-term memory and spatiotemporal reasoning abilities, enabling it to anticipate potential risks at intersections seconds in advance.
In 2026, several companies achieved key breakthroughs in long-term prediction. Xiaomi’s Xiaomi Pilot 5.0 system introduced an AI Large Model Decision Engine, directly integrating the end-to-end large model into the vehicle’s planning and control layers. This improved complex intersection efficiency by 40% compared to the previous generation, showcasing astonishing human-like performance in high-frequency negotiation scenarios like unprotected left turns.
Li Auto’s MindVLA-o1 model uses a predictive latent world model, allowing vehicles to imagine future driving scenarios in a latent space seconds ahead, transitioning from perception-reaction to prediction-action. Huawei’s ADS 4.1 further strengthened the cloud simulation capabilities of its WEWA architecture, generating and processing 72 million kilometers of Chinese training data daily to ensure continuous coverage of various long-tail scenarios.
Tesla’s FSD V14.3 version also took a crucial step in this direction by reconstructing the underlying neural network and optimizing model compression, enabling smooth operation even on older Model 3 and Model Y vehicles, paving the way for L4 autonomy by the end of 2026. These advancements indicate that the industry is comprehensively moving from reactive to proactive prediction phases.
In summary, end-to-end technology has advanced unprotected left turns from being largely unusable to highly effective. As technology continues to evolve, left turns at intersections will no longer be a weakness for intelligent driving but rather the ultimate stage to showcase its intelligence.
-
Ofilm Teams Up with ADSensE to Propel Large-Scale Deployment of All-Solid-State LiDAR Powered by ADS6311 Chip!
-
![]()
Loss of 2.5 Billion Yet Facing Strong Demand for Shares? Another Battle for Control of Lianchuang Electronics
-
![]()
Huawei’s Enjoy Series Flies Off the Shelves, Prompting Xiaomi to Double Down on Budget Smartphones
-
![]()
Beijing Hyundai's Top Executive Criticizes Industry Disorder: Certain Brands Treat Customers as Beta Testers
-
![]()
The domestic mobile phone market has declined for five consecutive quarters! Huawei defies the trend with significant growth: maintains its top market share
-
Annual Revenue Surpasses 3 Billion: An Automotive Trim 'Little Giant' Makes Its Debut on the Beijing Stock Exchange
-
![]()
The Space Force Wants to Spend $30 Billion on Rocket Launches: Is Trump Doubling Down, and Is SpaceX the Big Winner?
-
![]()
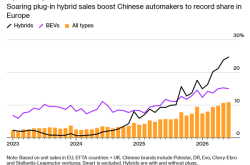
Going Crazy! One out of Every Three Plug-in Hybrids Sold in Europe is a Chinese Vehicle