Computex 2026 | NXP: Why Can AI Outplay Humans in Go but Struggle with Folding Clothes?
 06/05 2026
06/05 2026
 541
541
Authored by Zhinen Zhixin
At Computex 2026 in Taipei, NXP CEO Rafael Sotomayor kicked off his keynote with a thought-provoking question: If we're to integrate intelligent devices seamlessly into our daily lives, what exactly qualifies a machine as 'elite'?
Today, AI can triumph over world-champion Go players, yet it falters at the seemingly simple task of folding a single piece of clothing.
This might sound like a joke, but it's a genuine challenge in computer science known as Moravec's Paradox.
Tasks that are challenging for humans—such as reasoning and playing chess—come easily to machines. Conversely, actions that are second nature to humans—like walking and folding clothes—pose significant hurdles for machines. Sotomayor's answer lies in a blueprint for a biologically inspired Physical AI architecture.

Part 1: Instinctive Reactions: The Ultimate Challenge
Sotomayor's opening was ingenious—he drew a parallel with the World Cup. 'How do top players excel under extreme pressure? It's not just physical fitness or game awareness; it's the depth of skill mastery that renders conscious thought unnecessary.'
He cited Lionel Messi as a prime example. Messi's movements appear effortless because his instinctive reactions take over. 'He exploits the minuscule gap between stimulus and response, showcasing one of the most refined feats of intelligence on Earth.'
Over 95% of human daily activities are performed unconsciously and with minimal energy expenditure. Walking, adjusting posture, and picking up a cup—none require deliberate brain commands.
This raises a pertinent question: If instinctive reactions dominate human daily life, what about machines? This brings us to Moravec's Paradox. Proposed by Hans Moravec in the 1980s, it was initially counterintuitive:
◎ Tasks difficult for humans—such as reasoning, playing chess, and solving math problems—are straightforward for machines.
◎ Tasks simple for humans—like walking, folding clothes, and grasping objects—are exceedingly challenging for machines.
Sotomayor succinctly summarized, 'Instinctive reactions, not language or reasoning, pose the greatest challenge in robotics.' He shared a personal anecdote from that morning when he narrowly avoided being hit by a motorcycle: 'It was spinal reflex, not cortical reasoning, that saved me.'

The human nervous system offers a clear architectural model:
◎ Cerebral Cortex (Reasoning Layer): Processes conscious thought and decision-making in 300ms.
◎ Cerebellum (Coordination Layer): Manages motor control and balance.
◎ Spinal Cord (Reflex Layer): Processes sensory input and issues direct action commands in 40ms, independently.
Nature's design philosophy is evident: Place instinctive reactions closest to action. Proximity ensures speed, safety, and minimal energy consumption.
This biological blueprint serves as the prototype for NXP's 'Neural Axis Architecture.' Scaling intelligence isn't about enlarging the brain; it's about positioning intelligence strategically.
Real-world intelligence demands three fundamental attributes: ultra-low-latency response, distributed control (eliminating single points of failure), and exceptional energy efficiency. Centralizing all processing in a single cloud-based 'brain' violates all three principles.
NXP's solution involves dividing intelligence into three hierarchical layers:
◎ Reasoning Layer: Corresponds to the cerebral cortex, handling global planning and decision-making. This layer can be complex, slow, and power-intensive, operating on a 'second-level' timeframe. In vehicles, it determines navigation routes; in drones, it plans flight paths.
◎ Coordination Layer: Mirrors the cerebellum, managing motor control and balance. Faster than the reasoning layer, its core task is maintaining system dynamic stability. In software-defined vehicles, it functions as an independent computing unit overseeing vehicle dynamics.
◎ Reflex Layer: Equivalent to the spinal cord, this is the lowest and fastest response layer, acting autonomously without delay or approval. In vehicles, it's the zone controller handling critical functions like braking and suspension, ensuring closed-loop control within 40 milliseconds.
The three layers operate both independently and in highly coordinated synergy—this is the cornerstone of the Neural Axis Architecture.
This architecture starkly contrasts with today's mainstream AI industry. While everyone is focused on building larger models and compute clusters, Sotomayor reminds us that the physical world demands a different approach.
Equipping a robot with GPT-10 won't enable it to react to a collision in 40 milliseconds. Intelligence must be embedded in the body, joints, hands, and feet—not at the end of a call chain.
Perhaps we've inverted the evolutionary order. In the realm of Physical AI, mastering the spinal cord must precede addressing the brain.
Part 2: Three Scenarios, One Blueprint
Sotomayor illustrated the implementation of the Neural Axis Architecture through three product examples.
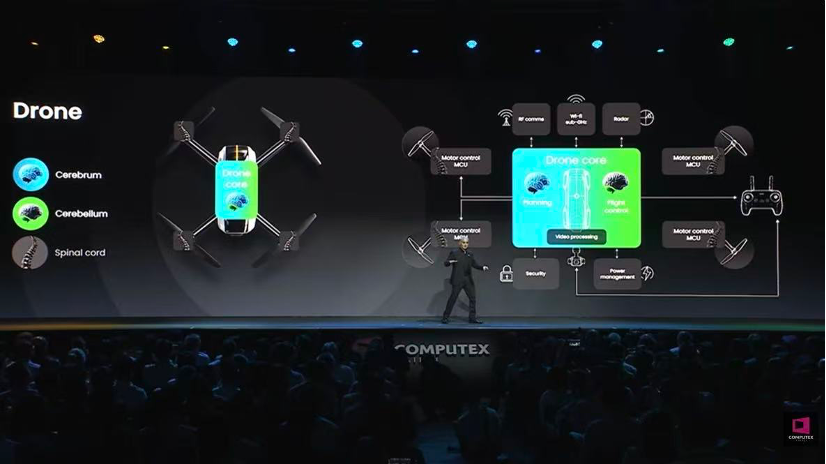
◎ Drones: NXP tracks 'end-to-end latency'—from camera capture, processing, transmission, controller response, to drone action—the entire closed loop takes just 20 milliseconds. Achieving this ensures drones feel agile and safe; any deviation leads to drift, instability, or crashes.
◎ Software-Defined Vehicles: This is NXP's most mature market. The 5nm S32N series central computing platform operates at the coordination layer, while the S32K5 zone controller functions at the reflex layer—both market-leading products. Sotomayor emphasized the logical and physical separation between layers: 'In life-critical vehicles, there's no room for error.'
◎ Humanoid Robots: Sotomayor described a vivid scenario: A robot navigates a warehouse carrying a valuable, fragile package. After being bumped by a pallet, it must recover balance, adjust grip strength, confirm position, and continue walking within 40 milliseconds. 'No cloud calls, no waiting for model responses. Intelligence resides in the body, joints, hands, and feet—they must handle the moment autonomously.'
A robot's flawless execution doesn't imply it understands its actions.
Sotomayor introduced the VLA (Vision-Language-Action) model to bridge perception and understanding—what objects does the robot see? What commands does it receive? How should it act?
He drew an analogy: Teaching robots physical laws is akin to injecting knowledge directly in 'The Matrix.' Robots don't need to learn gravity through repeated falls; you provide them with the world model directly.
NXP's eIQ toolkit serves as the bridge to migrate cloud-trained VLA models to edge hardware. Quantization, collaborative tuning, and local deployment enable complex AI models to run in constrained edge environments.
In the final segment of his speech, Sotomayor discussed trust, citing two laws: Murphy's Law ('Anything that can go wrong will go wrong') and Finagle's Law ('Anything that can go wrong will go wrong at the worst possible moment'). 'Trust isn't defined during smooth operations; it's defined in the worst moments.'
NXP's trust framework comprises three dimensions:
◎ Isolation: Prevent single points of failure.
◎ Protection: Implement hardware-level security mechanisms, now incorporating post-quantum encryption.
◎ Verification: Adhere to the SafeAssure certification program.
The real world lacks an 'undo' button. You can't fix a fracture with a software patch or handle a collision through system updates.
Factories deploying AI robots have witnessed a 40% surge in productivity beyond traditional automation. Diagnostic and laboratory robot sales skyrocketed by 610% in 2025.
NXP disclosed collaborations with Boston Dynamics—combining hardware and software to enable robots to work alongside humans in factory settings.
And with GE Healthcare—deploying intelligent systems in anesthesia.
Conclusion
Elite machines aren't necessarily the smartest in laboratories; they're the ones that perform reliably in the real world, under real conditions, when things go awry. The challenge lies in integrating intelligence into the physical world and ensuring it operates safely, reliably, and efficiently.
-
Ofilm Teams Up with ADSensE to Propel Large-Scale Deployment of All-Solid-State LiDAR Powered by ADS6311 Chip!
-
![]()
Loss of 2.5 Billion Yet Facing Strong Demand for Shares? Another Battle for Control of Lianchuang Electronics
-
![]()
Huawei’s Enjoy Series Flies Off the Shelves, Prompting Xiaomi to Double Down on Budget Smartphones
-
![]()
Beijing Hyundai's Top Executive Criticizes Industry Disorder: Certain Brands Treat Customers as Beta Testers
-
![]()
The domestic mobile phone market has declined for five consecutive quarters! Huawei defies the trend with significant growth: maintains its top market share
-
Annual Revenue Surpasses 3 Billion: An Automotive Trim 'Little Giant' Makes Its Debut on the Beijing Stock Exchange
-
![]()
The Space Force Wants to Spend $30 Billion on Rocket Launches: Is Trump Doubling Down, and Is SpaceX the Big Winner?
-
![]()
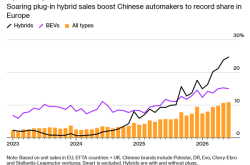
Going Crazy! One out of Every Three Plug-in Hybrids Sold in Europe is a Chinese Vehicle