Can Fuel and Electric Vehicles Reach the Same Level of Intelligence? Why Does Autonomous Driving Pose Challenges for Fuel Vehicles?
 03/02 2026
03/02 2026
 566
566
The notion of 'equal intelligence for fuel and electric vehicles' has been promoted for quite some time, suggesting a future where traditional fuel vehicles can provide intelligent driving and smart cabin experiences comparable to those of electric vehicles.
However, keen observers may have noted that while autonomous driving capabilities in intelligent electric vehicles are advancing rapidly, the widespread adoption of high-level intelligent driving in fuel vehicles remains notably sluggish. Why is autonomous driving a challenge for fuel vehicles?
Fundamental Differences in Vehicle Types
One of the primary tasks of an autonomous driving system is longitudinal control, which involves the precise management of acceleration and deceleration to achieve functions such as following, obstacle avoidance, and cruising.
In this context, electric motors and internal combustion engines exhibit fundamentally different physical characteristics. An electric motor generates torque based on the instantaneous establishment of an electromagnetic field, with virtually no delay in power output. Typically, it can complete the process from command issuance to torque release within ten milliseconds, making its response speed twenty to thirty times faster than that of an internal combustion engine.
This near-instantaneous response provides autonomous driving algorithms with a highly predictable controlled object, enabling precise and smooth handling of rapidly changing road conditions.
In contrast, the internal combustion engine in a fuel vehicle is a complex mechanical thermodynamic system with a lengthy and uncertain power output chain. When the autonomous driving algorithm issues an acceleration command, the vehicle must first adjust the throttle valve opening, triggering changes in air pressure within the intake manifold. After air enters the cylinder, it undergoes four cycles of compression, fuel injection, ignition, and power generation to produce power.
For a turbocharged engine, additional time is required to accumulate exhaust pressure to drive the turbocharger, a process known as turbo lag.
After completing this entire sequence, the resulting delay can reach two hundred or even three hundred milliseconds, or even longer in extreme cases. While this delay may only be noticeable as a slight physical sensation during human driving, in the high-frequency closed-loop control of autonomous driving, hundreds of milliseconds of error can cause the control algorithm's predictions to fail, leading to frequent fluctuations in the vehicle's pitch or following distance.
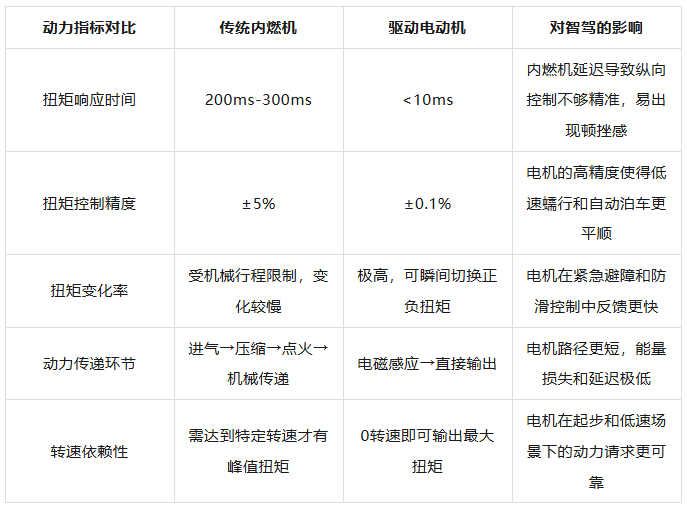
Key Data Comparison: Power Response and Control Parameters Between Internal Combustion Engines and Electric Motors
Beyond response time, the torque control precision of internal combustion engines also falls short of that of electric motors. Due to the influence of various random variables on the combustion process, such as intake temperature, humidity, fuel quality, and carbon deposits, the actual power output varies with each cycle.
For autonomous driving systems, this unstable input signal requires algorithms to possess strong fault tolerance capabilities. To compensate for these physical deficiencies, complex model predictive control algorithms must be introduced to simulate the thermodynamic behavior of internal combustion engines at the software level, thereby issuing compensatory commands in advance.
However, this 'software compensating for hardware' approach not only increases computational consumption but also raises the difficulty of system development and validation.
Architectural Bottlenecks in the Nervous System
Autonomous driving requires not only powerful 'muscles' but also a high-speed 'nervous system.' Traditional fuel vehicles typically employ a distributed electronic and electrical architecture, with dozens or even hundreds of independent Electronic Control Units (ECUs) distributed throughout the vehicle, each responsible for specific functions like the engine, transmission, air conditioning, and doors.
This 'fragmented' architecture posed no issues in the era of traditional automobiles but becomes a significant obstacle in the era of intelligence. Under a distributed architecture, different modules communicate via traditional CAN buses, which have extremely low data transmission rates. The classic CAN bus bandwidth is only 1 Mbps, while the upgraded CAN-FD reaches around 5 Mbps.
When high-level autonomous driving systems are implemented, they need to process massive amounts of real-time data from multiple high-definition cameras, LiDAR, and ultrasonic radar.
The raw data stream generated by an 8 MP camera alone requires several Gbps of bandwidth, thousands of times beyond the capacity of traditional CAN buses. If high-level intelligent driving is forcibly integrated into the old architecture, data transmission delays become unacceptable, directly threatening driving safety.
Therefore, to achieve the same level of intelligence as electric vehicles, fuel vehicles must undergo a major overhaul of their 'nervous system,' upgrading from a distributed architecture to a domain controller architecture or a centralized integrated architecture.
This upgrade entails using gigabit or even 10-gigabit-level automotive Ethernet as the backbone network and introducing high-speed serializers/deserializers technology to handle high-definition visual signals. However, embedding these highly sensitive electronic components into the mechanical layout of fuel vehicles exposes them to severe electromagnetic interference.
The high temperatures in the engine compartment and pulse interference from the ignition system can cause bit errors in high-frequency data streams. To ensure signal integrity, fuel vehicles require more complex shielded wiring harnesses and higher-end electronic components, not only increasing manufacturing costs but also extending development cycles.
Under the trend of Software-Defined Vehicles (SDV), vehicles are required to possess continuous evolution capabilities, updating algorithms through Over-the-Air (OTA) technology.
On fuel vehicles with a distributed architecture, due to the isolation between ECUs and the fact that hardware performance is generally designed to just meet factory-installed functions, there is little remaining computational power and storage space to support large-scale functional iterations.
In contrast, electric vehicles are generally designed with performance redundancy from the outset, adopting higher-computational-power central computing platforms. This over-specification conflicts with the long-standing logic in the fuel vehicle industry of pursuing extreme cost control per unit.
Realistic Constraints of Energy and Execution
Autonomous driving hardware is a veritable 'power hog.' For instance, a computing platform supporting L3 or L4 autonomous driving, equipped with dual NVIDIA Orin-X chips, can have a full-load power consumption exceeding 250 W. Coupled with various radar and high-power sensors, the power demand of the entire intelligent driving system poses a significant challenge to the 12 V power supply system of fuel vehicles.
Although fuel vehicles can generate over 1000 W of electrical power while driving, this power is primarily used to maintain basic functions like fans, headlights, and electronic power steering. When the intelligent driving system requires an additional 10% to 20% of the electrical load, the stability and redundancy capabilities of the generator and 12 V battery become crucial.
In comparison, electric vehicles possess massive high-voltage battery packs, easily obtaining stable high currents through DC-DC converters and inherently featuring a comprehensive battery management system to handle instantaneous load fluctuations.
On fuel vehicles, to ensure the electrical safety of the intelligent driving system, a second backup power supply system or an upgraded high-capacity generator is needed, not only involving spatial layout challenges but also increasing the overall vehicle weight.
Simultaneously, the heat dissipation issues brought about by high-computational-power chips cannot be overlooked. In some fuel intelligent driving solutions pursuing extreme performance, fan cooling alone is insufficient, and even a dedicated refrigerant circuit from the air conditioning system may be required to cool the computing platform.
More critically, drive-by-wire technology for the chassis is essential. Autonomous driving requires that the vehicle's steering, braking, and throttle be entirely controlled by electrical signals, eliminating physical connections between humans and machinery. Electric vehicles, lacking a vacuum pump driven by an internal combustion engine, inherently feature electronically assisted drive-by-wire braking systems (such as iBooster or One-box systems), perfectly aligning with the needs of autonomous driving.
In contrast, traditional fuel vehicles mostly rely on mechanical hydraulic braking systems. When equipped with autonomous driving, if faster response speeds or more precise force control are required, traditional mechanical hydraulic structures prove inadequate.
To achieve true autonomous driving redundancy, fuel vehicles need to switch to expensive Electro-Hydraulic Braking (EHB) systems to ensure emergency braking via electrical signals even when the main controller fails. Compared to traditional hydraulic braking, drive-by-wire braking can shorten pressure buildup time by approximately 0.35 seconds, translating to a difference of over ten meters in braking distance at high speeds.
Furthermore, since drive-by-wire steering systems require completely severing the physical connection between the steering wheel and steering linkage, this poses higher demands on fuel vehicle manufacturers in balancing safety certification and mechanical quality.
Can 'Equal Intelligence for Fuel and Electric Vehicles' Be Achieved?
Despite numerous physical and architectural disadvantages in the intelligentization of fuel vehicles, it is not a dead end. With the emergence of new-generation models like the Audi A5L, we see the possibility of achieving 'equal intelligence for fuel and electric vehicles' through deep cross-domain integration.
These models begin to incorporate top-tier intelligent driving solutions like Huawei's Qiankun, whose core approach is no longer simply overlaying an intelligent driving system onto a fuel vehicle but deeply integrating it into the control logic of the powertrain. In these solutions, the intelligent driving brain no longer merely issues 'accelerate' commands but directly participates in the fine-tuned regulation of engine fuel injection and transmission shifting.
Through predictive power control, the intelligent driving system analyzes road gradients, traffic flow density, and upcoming traffic light status captured by sensors, preemptively adjusting the output characteristics of the fifth-generation EA888 engine and the shifting strategy of the dual-clutch transmission.
When deceleration is required, the system coordinates engine fuel cutoff and transmission downshifting to achieve smooth kinetic energy management. This deep synergy not only enhances riding comfort but also largely overcomes the natural lag in internal combustion engine power response. This 'proactive compensation' of mechanical performance through software algorithms represents the core path for fuel vehicles to achieve high-level autonomous driving.
In the automotive industry, intelligence has become the primary standard for measuring vehicle competitiveness, with 2024 regarded by the industry as the first year of intelligence, and Level 2 assisted driving has become accessible in models priced around 100,000 yuan. For fuel vehicle manufacturers, transitioning to intelligence is not only a technical challenge but also a transformation of organizational structure and engineering culture.
Traditional automakers' executives often have mechanical backgrounds, while intelligent vehicles demand systems engineering and agile software development personnel. This transition from 'mechanical definition' to 'software definition,' although painful, is a necessary path for survival.
Final Words
Achieving the same level of intelligence for fuel and electric vehicles is not unattainable, but it requires nearly a complete overhaul of the underlying architecture of fuel vehicles. The millisecond-level lag in power response, physical bottlenecks in bus bandwidth, and realistic constraints in power supply for fuel vehicles hinder the development of equal intelligence for fuel and electric vehicles. However, by introducing domain controllers, drive-by-wire chassis, and deep learning algorithms, the intelligentization of fuel vehicles may no longer be far off!
-- END --
-
![]()
Can Chinese Automakers Pose Such Fierce Competition? Mercedes-Benz Cancels Year-End Bonuses for 90,000 Staff, Volkswagen to Lay Off 100,000 Employees...
-
![]()
Anhui and Zhejiang Vie for the Crown in New Energy Vehicle Dominance: Who Will Prevail?
-
![]()
Tmall 618 Rankings Unveil Trends Transforming the Home Appliance Industry
-
![]()
This Week in Home Appliances: Overseas Boom! Midea, TCL, Dreame Break Through; Casarte, Fotile, Gree, Hisense, Ronshen Lay Foundations
-
![]()
Aiming to Be the Alphard of the Electric Era! After D99's Launch, Leapmotor Will Release All-New Technologies to Pave the Way for a High-End Brand | Mirrormedia Pro
-
![]()
Over 5,200 Orders Placed on First Day: Can the Qijing GT7, Priced from 209,900 Yuan, Compete with the Z7 and SU7? | Mingjing Pro
-
![]()
AI Predicting the World Cup? It’s Time to Stop Insulting AI
-
![]()
iPhone 18 Pro Memory Costs Soar Threefold! Apple Seeks Trump Administration Approval for CXMT Memory Chips