What upgrades does Huawei's Intelligent Driving System have from ADS 4 to ADS 5?
 05/09 2026
05/09 2026
 453
453
In April 2025, Huawei released the Qiankun Intelligent Driving ADS 4. At that time, its core selling points were the first implementation of the WEWA architecture and the launch of a commercial solution for L3 autonomous driving on highways. ADS 4 replaced traditional hierarchical decision-making logic with a World Engine + World Behavior Model architecture, reducing end-to-end latency by 50%, improving traffic efficiency by 20%, and decreasing the rate of harsh braking by 30%. At the perception level, it was equipped with a 192-line LiDAR, distributed millimeter-wave radar, and in-cabin laser vision sensors, with the safety system upgraded to the CAS 4.0, covering five dimensions of safety. It can be said that ADS 4 achieved a crucial transformation from functional stacking to architectural unification. Back then, ZhiJia ZuiQianYuan also discussed with everyone the improvements of ADS 4 compared to ADS 3 (Related reading: What changes has Huawei ADS undergone from 3.0 to 4.0?).
A year later, on April 23, 2026, ADS 5 was released. Jin Yuzhi, CEO of Huawei's Intelligent Automotive Solution BU, positioned it as a system designed for autonomous driving, not just a minor version update but a generational leap. This is also evident from the version number—Huawei skipped intermediate versions like ADS 4.2 and 4.3, directly pushing the system to 5.0. So, what improvements does ADS 5 offer compared to ADS 4?
What exactly changed in the architecture from WEWA 1.0 to 2.0?
The core architecture of ADS 4 is WEWA, a combination of the World Engine and the World Behavior Model. The cloud-based World Engine uses AI to generate difficult-case diffusion models, simulating extreme scenarios such as "ghost probes" and sudden braking by the vehicle ahead to train the AI. The vehicle-end World Behavior Model fuses multi-modal perception data to make real-time decisions on real roads. The limitation of this solution is that cloud-based training still follows a single-vehicle intelligence approach, where each simulation only allows one AI driver to learn in the environment, lacking interaction with other traffic participants. Moreover, the training is offline, with engineers first setting scenario rules for the AI to learn, making the entire process sequential.

WEWA Technical Architecture, Image Source: Internet
ADS 5 upgrades WEWA to version 2.0, with changes primarily in two areas.
On the cloud side, the World Engine introduces a multi-agent interaction mechanism. Simply put, past training was like letting a single driver practice alone on an empty road, lacking real interaction between vehicles. Now, hundreds or thousands of AI drivers operate simultaneously in a virtual environment, each with its own behavioral logic (some aggressive in cutting in, some conservative in yielding, some making sudden lane changes). The AI must learn to cope with the uncertain behaviors of various traffic participants in this environment, increasing training intensity by 10 times. Additionally, WEWA 2.0 adopts online reinforcement learning, where the AI no longer learns offline before going on the road but generates scenarios, learns to respond, and verifies effectiveness in a closed loop, improving training efficiency by 10 times.
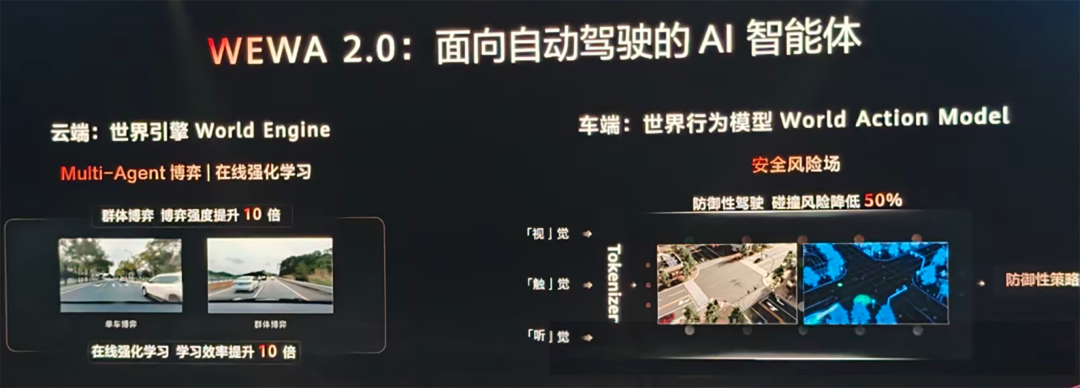
Image Source: Internet
On the vehicle side, the World Behavior Model introduces Safety Risk Field technology. While ADS 4's vehicle-end model focused on mimicking human driving behavior for decision-making, ADS 5 goes further, capable of real-time assessment of risk distribution on the road from three dimensions—kinetic energy, potential energy, and behavior—generating a dynamic risk heatmap. The system uses this heatmap to determine which areas are dangerous and which directions are safe, adopting defensive driving strategies accordingly. Huawei's data indicates that this technology can reduce collision risk by 50%. While ADS 4 emphasized reduced end-to-end latency, it lacked this layer of proactive defense mechanism based on risk quantification, marking a fundamental difference in decision-making logic between the two generations.
From 192-line to 896-line LiDAR: What practical improvements does this bring?
ADS 4 was equipped with a 192-line high-precision solid-state LiDAR, with a maximum recognition distance of about 100 meters for obstacles 30 centimeters high, corresponding to a maximum vehicle speed of approximately 80 km/h. For targets 14 centimeters high, there was a possibility of missed scans. ADS 4 also featured distributed 4D millimeter-wave radar, maintaining reliable operation in adverse weather conditions such as rain, fog, and dust.
ADS 5 directly upgrades the LiDAR from 192 lines to 896 lines, quadrupling the resolution (Related reading: How does high-resolution LiDAR enhance autonomous driving capabilities?). This is not just a numerical leap but brings practical improvements in two aspects.
First, it enables farther and more precise detection of small targets. The 896-line LiDAR increases the maximum recognition distance for obstacles 30 centimeters high to 162 meters, supporting stable recognition at speeds up to 120 km/h. For obstacles 14 centimeters high (close to the ground clearance of most vehicle chassis), it can stably recognize them from 120 meters away. Some small objects that ADS 4 might miss (such as black tires dropped on the highway at night, overturned cones, or cardboard fragments) can be effectively covered by ADS 5's sensor suite. The improvement is particularly noticeable in recognizing low-reflectivity targets, with ADS 5's LiDAR increasing the maximum recognition distance for such targets by 190%, and enhancing detection capability in dark environments from about 42 meters in ADS 4 to 122 meters.
Second, it adopts a dual-optical-path architecture design. ADS 4's LiDAR used a unified optical path, requiring trade-offs between wide-angle and detailed recognition. ADS 5's 896-line LiDAR employs a wide-angle plus telephoto integrated dual-focus structure, equivalent to having two receiving systems simultaneously. The wide-angle optical path covers a broad forward field of view, while the telephoto optical path focuses on distant target details, working together to create a picture-in-picture composite imaging effect. This design allows the system to grasp the overall traffic environment while focusing on distant small objects, balancing field-of-view width and detail precision.
Overall, ADS 5's generational improvement in perception does not rely on stacking more sensors but achieves a quantum leap in resolution, detection distance, and small-target recognition—three key indicators. For long-tail scenarios that ADS 4 struggled with, ADS 5 demonstrates significantly stronger coverage capabilities.
From scratch: What problems does Qiankun OS solve?
During the ADS 4 era, the intelligent driving system ran on a general-purpose in-vehicle operating system without an independent proprietary OS. Huawei relied more on algorithmic optimizations at the WEWA architecture level to control latency. The 50% reduction in end-to-end latency announced for ADS 4 referred to architectural optimizations.
With ADS 5, Huawei directly released Qiankun OS, the industry's first operating system explicitly designed for autonomous driving scenarios. Its core value lies not in having an operating system per se but in solving two issues that ADS 4 did not fully address.
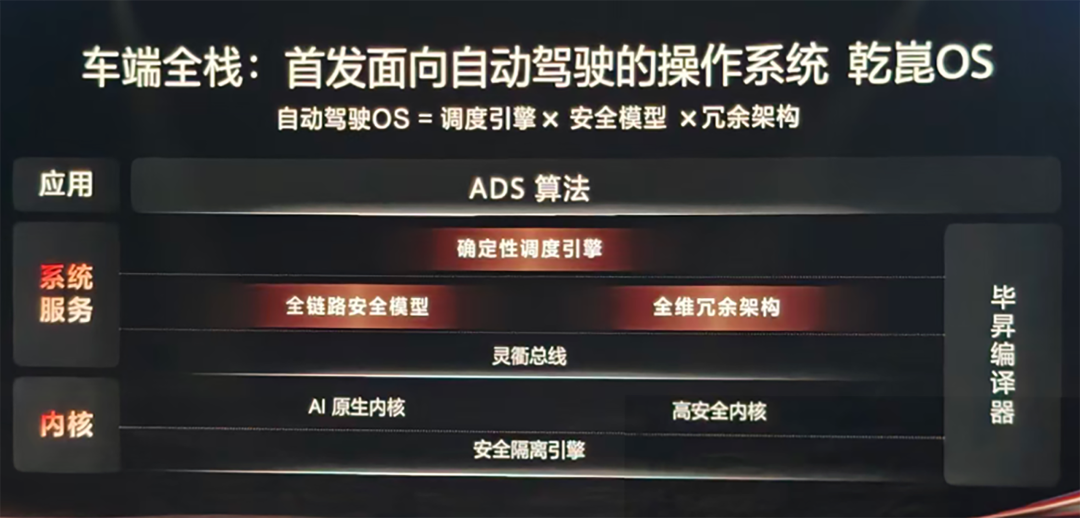
Image Source: Internet
The first is priority scheduling. Under a general-purpose OS architecture, intelligent driving tasks share computing resources with other system tasks, potentially delaying responses to urgent scenarios due to excessive queued tasks. Qiankun OS incorporates a deterministic scheduling engine, ensuring that urgent intelligent driving tasks (such as emergency braking when a vehicle suddenly cuts in) receive the highest priority for processing. Combined with Lingqu Bus technology, it further reduces signal latency inside the vehicle by 30% compared to ADS 4.
The second is safety and reliability. Qiankun OS features a full-link zero-trust security model with four layers of protection against intrusion, leakage, tampering, and proliferation, along with a comprehensive safety redundancy architecture. ADS 4 lacked this layer of OS-level security mechanism. Huawei's metrics indicate that Qiankun OS improves system reliability by 20 times compared to the ADS 4 era.
Another noteworthy point is vehicle control precision. ADS 4's introduction of the XMC digital chassis engine achieved six-in-one full-domain fusion, laying a foundation for chassis control. ADS 5's XMC iterates to version 3.0, with deeper integration of underlying algorithms with ADS, enabling parallel processing of perception, decision-making, and execution tasks. Vehicle control precision improves by 30% compared to ADS 4.
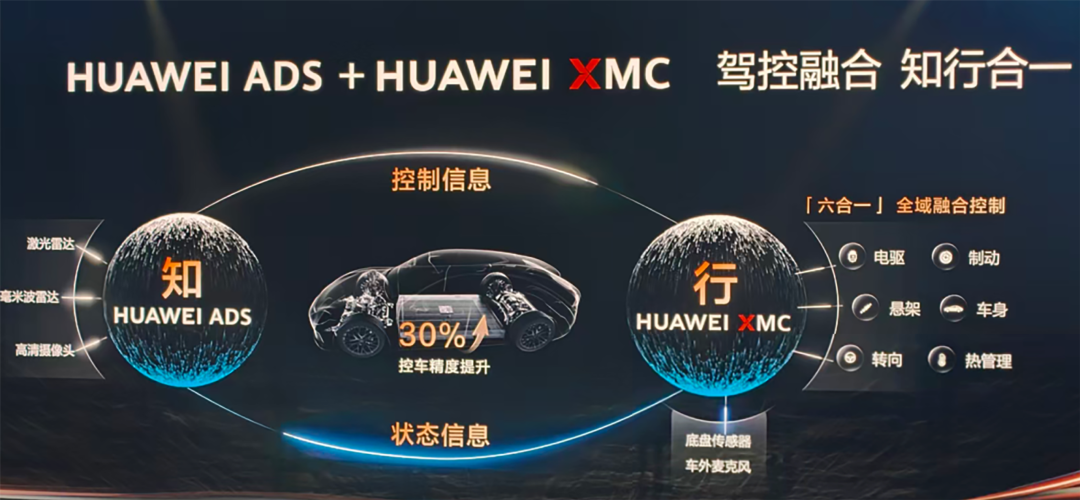
Image Source: Internet
Safety system: From five to six dimensions—not just adding a word
ADS 4's safety system was the CAS 4.0 all-dimensional collision avoidance system, covering five dimensions: full-speed-range, all-directional, all-target, all-weather, and all-scenario. Full-speed-range covered AEB effectiveness from low to high speeds; all-directional meant front, side, and rear collision avoidance functions; all-target referred to recognizing various obstacles such as pedestrians, vehicles, and non-motorized vehicles; all-weather ensured perception stability in rain, fog, and dust; all-scenario covered different environments like urban roads, highways, and parking lots. During the ADS 4 phase, these five dimensions primarily addressed real-time handling and avoidance before and after collisions.
ADS 5's CAS 5.0 adds a new full-time-domain dimension to the five existing ones, becoming a six-dimensional safety system. This is not simply adding a new term to the original framework but redefining the safety protection timeline, extending it from pre-event prevention to post-event safeguarding.
The pre-event portion includes three new functions. Road hazard warnings enable vehicle-to-vehicle information sharing via the cloud. Once an ADS-equipped vehicle encounters an accident or obstacle, other ADS vehicles within a 5-kilometer radius receive simultaneous notifications, with interface alerts popping up when approaching within 2 kilometers of the incident. This function was absent in ADS 4. Human-driven intersection overspeed active deceleration and human-driven sharp-turn active deceleration are often overlooked in many assisted driving technologies because they do not only activate when NCA is on. When the driver manually controls the steering wheel, if the system judges there is a risk of overspeeding at an intersection or excessive exit speed in a sharp turn, XMC actively intervenes to decelerate. ADS 4's safety assistance primarily focused on scenarios after assisted driving was activated, while this generation provides clearer preventive interventions during human-driven states.
For the post-event portion, driver incapacitation assistance has been upgraded. ADS 4 introduced the first-generation incapacitation assistance function, but its implementation relied on pulling over the vehicle. ADS 5's incapacitation assistance 2.0 can automatically steer the vehicle to the nearest service area or toll gate on highways, not just stopping on the emergency lane. This change improves actual rescue convenience in incapacitation scenarios, as service areas are easier for rescue vehicles to locate than emergency lanes.
The original five dimensions have also been strengthened in CAS 5.0. The lower limit of forward AEB activation speed decreases from 4 km/h in ADS 4 to 1 km/h, improving anti-scratch capability in low-speed scenarios. Side-rear collision avoidance adds eAES 3.0 functionality. When the system perceives a collision risk from the side or rear, it not only passively adjusts the vehicle's posture but also actively changes lanes or accelerates to avoid. This means ADS 5's safety strategy expands from avoiding hitting others to avoiding being hit by others, whereas ADS 4 focused on passive corrections, and ADS 5 shifts toward proactive path planning.
Additionally, ADS 5 introduces excessive steering stability control assistance. When the system detects driver oversteering without collision risk, ADS plans the correct driving trajectory, and XMC precisely controls the vehicle body to prevent loss of control. ADS 4's existing tire blowout stability control function has been extended to more vehicle models in ADS 5.
Final thoughts
The improvements of ADS 5 over ADS 4 can be summarized in four dimensions: in cloud-based training efficiency, multi-agent interaction and online reinforcement learning bring a 10-fold increase in training efficiency; in vehicle-end perception capabilities, the 896-line LiDAR paired with a dual-optical-path architecture advances recognition distance, precision, and low-light performance by a significant margin; at the underlying system level, Qiankun OS resolves the priority scheduling and system reliability issues left over from the ADS 4 era; in the safety system, CAS 5.0 extends the protection timeline from in-event to a complete chain of pre-event, in-event, and post-event safeguards.
-- END --
-
![]()
Total Investment Hits Nearly 3.28 Billion! Goertek Launches Mass Production of 12-Inch Transparent Substrate Wafer for AR Glasses’ Micro-Nano Optical Components
-
![]()
Why Is This Precision Optical Film Leader Worth Reevaluating with a Tens of Millions Procurement?
-
![]()
AI Costs Plummet by 90% Over Nine Years: Key Insights from Davos You Shouldn’t Miss
-
Doubao, Your Late-Night AI Companion, Now Eyes Profitability
-
![]()
SRC Empowers SEER Intelligence to Reach a Market Cap of Tens of Billions, Yet Fails to Sustain Profitability
-
![]()
China’s Embodied AI Industry Faces Fierce Domestic Competition, Making Overseas Expansion Essential for Survival
-
![]()
32.8 Billion Yuan Investment! Goertek’s 12-Inch AR Glasses Optical Wafer Base in Lingang Begins Operations
-
![]()
How Far is the All-New Li Auto L8 from Being the Best Five-Seat SUV with In-House Full-Stack Development?