What New Opportunities Will the "Opinions on Further Implementing the 'AI+' Action" Bring to the Autonomous Driving Industry?
 08/28 2025
08/28 2025
 491
491
With the relentless advancement of intelligent technology, AI's presence in various facets of society is growing. From healthcare and education to transportation, AI has permeated every corner of our daily lives. To further propel the 'AI+' initiative, fostering deep and extensive integration of AI across economic and social sectors, reshaping human production and lifestyle paradigms, driving revolutionary productivity gains, and ushering in profound changes in production relations, the State Council issued the "Opinions of the State Council on Further Implementing the 'AI+' Action" (hereinafter referred to as the "Opinions") on August 21, 2025. What fresh opportunities will these Opinions present for the autonomous driving industry? (Editor's Note: Click "Read the Original" at the end of the article to view the full text of the "Opinions").

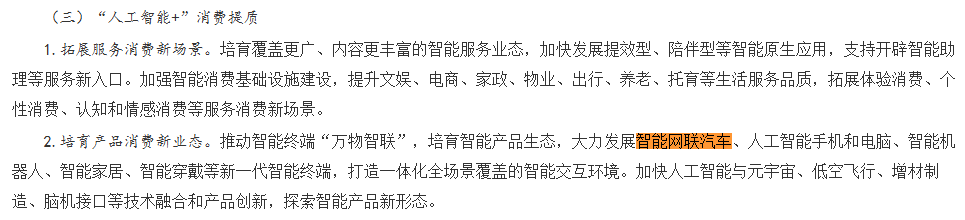
Let's delve into the Opinions' most direct textual reference to the autonomous driving industry. In the third point addressing the acceleration of key actions for 'AI+' consumption quality improvement, it is mentioned to foster "intelligent connectivity of all things" for smart terminals, nurturing a smart product ecosystem, vigorously developing new-generation smart terminals such as intelligent connected vehicles, AI smartphones and computers, intelligent robots, smart homes, and wearable devices, thereby creating an integrated and fully-covered smart interactive environment. Furthermore, the Opinions advocate for accelerating the integration of AI with technologies like the metaverse, low-altitude flight, additive manufacturing, and brain-computer interfaces, alongside product innovation, to explore new forms of smart products. Although autonomous driving is mentioned just once, the Opinions abound with content meriting our in-depth exploration.
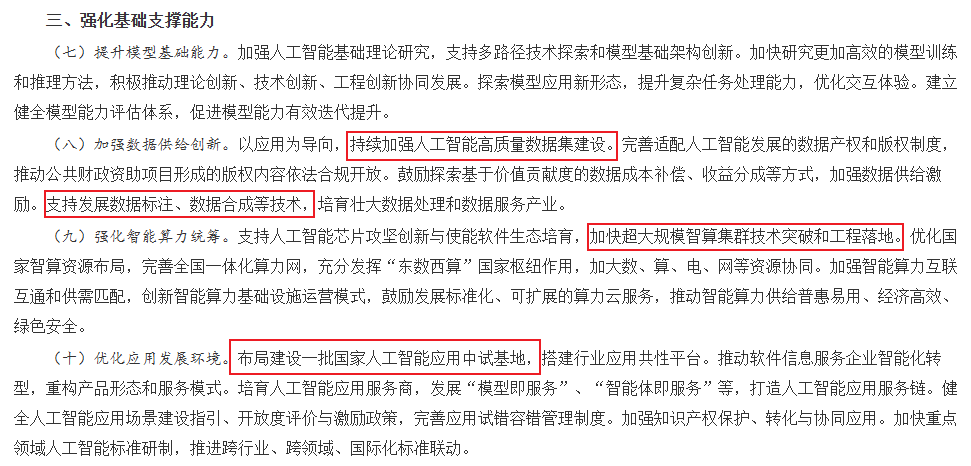
Upon reading the entire set of Opinions, its core lies in connecting computing power, data, models, and application scenarios, enabling AI to be deployed faster, wider, and deeper. For autonomous driving, this isn't merely a slogan but will tangibly impact various technical aspects such as perception, localization, decision-making, simulation validation, vehicle-cloud collaboration, and test verification chains. Let's start with an overarching and intuitive change. Over the past few years, common bottlenecks impeding the development of autonomous driving have been "insufficient high-quality data, uneven computing power, incomplete scenario coverage, high validation costs, and multiple breakpoints in the industrial chain." The Opinions emphasize, in multiple paragraphs, the need to strengthen the construction of high-quality datasets, a national integrated computing power network, pilot application bases, standard development, and open sharing. These implementation measures will directly address each of the aforementioned bottlenecks.
For the autonomous driving perception system, the most immediate impact is the simultaneous catalyzation of both data and model ends. The Opinions stress the need to "continuously strengthen the construction of high-quality AI datasets" and "support technologies such as data annotation and data synthesis," suggesting potential financial or policy support for the development of high-quality annotated datasets, long-tail event material libraries, and synthetic data pipelines for traffic scenarios. For automakers and autonomous driving solution providers, this will usher in two positive changes. Firstly, the sample size of real-world long-tail scenarios (like extreme weather, rare obstacles, complex urban conditions) will gradually increase, enabling perception models to undergo more reliable training and evaluation in these rare scenarios. Secondly, synthetic data and simulation-synthesis annotation will receive more standardized support and funding, reducing acquisition costs and accelerating model iteration. The tangible manifestation is that the perception module can more boldly adopt multi-modal learning and self-supervised pre-training strategies, jointly training cameras, millimeter-wave radars, LiDAR, and high-precision map information to enhance the robustness of small target detection and night and rain/snow conditions.
Additionally, the release of the Opinions will also influence the development of sensor and hardware collaborative technologies. The Opinions propose strengthening the overall planning of computing power and supporting chip research and the construction of intelligent computing clusters, significantly impacting both the vehicle and cloud computing power layouts. The design of autonomous driving systems has always sought a balance between "real-time performance on the vehicle side" and "large model capabilities in the cloud." With the national promotion of infrastructure such as the "National Integrated Computing Power Network" and the "East Data to West Computing" initiative, automakers and autonomous driving solution providers will find it easier to migrate non-real-time but computationally intensive tasks (like large-scale model iterative training, scenario-level association, and offline simulation batch processing) to accessible public intelligent computing resources. This allows the vehicle side to focus more resources on low-latency critical paths (perception fusion, control closed-loop). In other words, edge real-time control remains lightweight and highly verifiable, while complex strategy training, long-term behavior modeling, and scenario comprehensive reasoning can be conducted more deeply and frequently in the cloud, thereby promoting end-cloud collaborative design as one of the mainstream architectures.

The decision-making and planning level will also witness enhancements in model capabilities due to the release of the Opinions. The Opinions mention "enhancing basic model capabilities" and "accelerating research on more efficient model training and inference methods." For autonomous driving, this means that more complex large models or specialized models can be utilized for behavior prediction, interaction modeling, and long-term sequence planning. Technically, one can directly observe that multi-agent large-scale sequence models used for trajectory prediction will become more refined, capable of more accurately modeling the intentions of pedestrians, cyclists, and other vehicles; and that game theory or reinforcement learning modules used for interaction will have increased computing power for online/offline training, enabling vehicles to perform more robustly in complex interaction scenarios such as unprotected left turns, narrow road meetings, and temporary construction areas. However, there are also considerations to be made. Stronger models bring higher validation costs, particularly in terms of safety interpretability and traceability, which need to be synchronized. End-to-end black box models that haven't undergone thorough validation cannot be directly placed in critical control links. Hierarchical validation and redundancy guarantees must be maintained.

The simulation and validation ecosystem will accelerate its improvement under the impetus of the Opinions. The Opinions propose to "deploy and build a number of national AI application pilot bases" and "promote the intelligent transformation of software and information service enterprises," providing institutional-level support for simulation validation, scenario library standardization, and pilot validation platform construction in the autonomous driving industry. For autonomous driving engineers, this means easier access to large-scale, high-fidelity simulation resources, unified scenario description standards, and open or shared test case libraries. This will undoubtedly prompt the autonomous driving industry to shift from mileage-centered road testing to a combined validation method of "scenario-driven + simulation acceleration," thereby more economically covering long-tail scenarios and achieving faster iteration. However, while simulation technology evolves, we must also recognize that the environmental gap between simulation environments and real vehicles remains a key technical challenge, necessitating greater efforts in rendering physical correctness, sensor noise modeling, and behavior model consistency.

In terms of software engineering and toolchains, the Opinions emphasize the need to "promote the integrated and coordinated development of AI-driven technology research and development, engineering implementation, and product landing," directly impacting the autonomous driving software development process. We can anticipate the introduction of more intelligent development tools into areas such as automated test case generation, model-based requirements tracing, automated performance regression testing, intelligent log analysis, and fault location tools. Integrating large language models (LLM) for code review, test case generation, log summarization, and anomaly pattern recognition will significantly enhance engineering efficiency. However, it's crucial to note that such tools must pass strict security assessments in safety-critical systems to avoid amplifying errors caused by automation tools.

Data governance, privacy, and compliance will also affect data collection and sharing methods in autonomous driving. The Opinions mention the need to "improve data property rights and copyright systems adapted to AI development," indicating that in vehicle data, the industry will witness more standardized methods for data sharing, synthetic data publication, and privacy protection annotation. For automakers and map service providers, compliant data sharing mechanisms (like federated learning, differential privacy, and synthetic data alternatives) will be adopted more widely, enabling cross-enterprise model collaborative training and scenario sharing without compromising personal privacy. This requirement also urges technical teams to devote more effort to privacy protection algorithms, encrypted inference, and compliant data pipeline construction.

Regarding safety and trustworthiness, the Opinions repeatedly emphasize the need to "improve safety capabilities" and "establish technical monitoring, risk early warning, and emergency response systems." For autonomous driving technical teams, this isn't merely a slogan but requires embedding monitorable, controllable, and rollbackable capabilities into product design. Specifically, in terms of technology, it can be discussed in three parts. Firstly, vehicles must have more comprehensive online health monitoring (system self-check, model drift detection, sensor degradation detection) and can automatically switch to safe mode or degradation strategies when anomalies are detected. Secondly, model interpretability, annotation of failure boundaries, and formalization of safety use cases (such as using coverage criteria to define when it's safe to release) will become important components of product validation. Thirdly, accident records and model version management will be standardized for post-hoc analysis and data-driven improvements. This requires automakers and autonomous driving solution providers to strengthen research and development in online anomaly detection algorithms, model uncertainty assessment (e.g., Bayesian approximation, confidence calibration), and failover strategies.

Promoting industrial chain collaboration and open-source ecosystems is also crucial for technological innovation. The Opinions encourage the "construction of AI open-source communities" and "promoting the convergence and openness of models, tools, datasets, etc.," which will drive the generation of more high-quality open-source perception models, simulation scenarios, and evaluation toolchains in the field of autonomous driving. For developers, the open-source ecosystem can significantly reduce the cost of reinventing the wheel, allowing more teams to focus on system integration, engineering implementation, and scenario customization. This will also bring challenges to software supply chain security, necessitating robust dependency management of open-source components, credibility audits, and closed-loop patch management. Otherwise, simple third-party vulnerabilities may lead to systemic risks.

The Opinions' emphasis on "talent team construction" and "popularizing AI education" will alleviate the long-standing engineering talent shortage faced by the autonomous driving industry. This will mean that more composite engineers will enter the autonomous driving industry, requiring knowledge of both machine learning and control, systems engineering, and automotive software architecture. For project delivery, the enhancement of team capabilities will lead to an increase in end-to-end system engineering capabilities. For instance, deploying mature models to the vehicle side, optimizing real-time inference, scheduling heterogeneous computing power on the vehicle side, and low-power inference will become routine engineering tasks.

Regarding vehicle-road collaboration and infrastructure, the Opinions emphasize the necessity of fostering the intelligent transformation of municipal infrastructure and city construction to accommodate smart terminals. For autonomous vehicles, the growing array of intelligent infrastructure, including edge computing power nodes, V2X short-range communication systems, and roadside perception cameras/radars, will supply additional sensory data and computational support, particularly in complex intersections, tunnels, and visually challenging scenarios. Vehicle-road collaboration significantly enhances perception accuracy and decision-making safety, necessitating autonomous driving systems to not only interpret vehicle-side sensor data but also seamlessly integrate multi-source heterogeneous information (such as edge detection results, road network-level semantic information, and traffic flow predictions) to establish robust decision-making foundations.

While the Opinions outline numerous requirements for foundational support (data, computing power, standards, talent), from a technical standpoint, autonomous driving still grapples with practical challenges such as sensors' physical limitations in extreme weather, the substantial annotation costs of rare long-tail scenarios, the economic burden of system-level redundancy, and the lifecycle management of automotive-grade software. These issues persist, yet with more comprehensive national resources and standards, the autonomous driving industry can systematically invest in researching and developing solutions, mitigating collaboration costs in terms of "who does it, how to do it, and how to verify it," thereby making technological advancements more reproducible and reviewable.
The Opinions unequivocally position essential elements for autonomous driving—computing power, data, standards, talent, open-source ecosystems, and pilot verification platforms—under a clearer national coordination framework. This directly reduces the threshold for large-scale training and verification, accelerates the creation of scenario libraries and simulation resources, fosters the application of vehicle-cloud collaboration and more intricate models in non-critical pathways, and drives the industry towards maturity in safety, data governance, and testing standards. Consequently, automakers and autonomous driving solution providers must not only develop advanced algorithms but also treat engineering, verification, privacy protection, and supply chain security as equally critical technical tasks. This dual-track advancement of "algorithms + engineering" is pivotal for safely and steadily translating research outcomes onto the road, transforming them into products worthy of user trust. The policy merely constructs a more conducive "canal" (computing power, data, standards, and pilot platforms) to facilitate the germination of autonomous driving "seeds." However, for these seeds to flourish into towering trees, the industry must diligently work on engineering, testing, and long-term operations.
-- END --
-
![]()
Equity Changes Hands Three Times in Seven Years: JMCG Leans on Contract Manufacturing for Survival Amid Brand Deficits
-
![]()
Automotive Market News: Nine Departments Jointly Roll Out Aftermarket Consumption Initiatives
-
How Electronic Fabric Became the Critical Chokepoint for AI’s Trillion-Dollar Computing Infrastructure
-
![]()
Depreciation Rate on Par with Mobile Phones: Just 40% Value Retention After Three Years—Why Do Battery Electric Vehicles Lose Their Worth?
-
![]()
Clearing Bugatti Stock Worth 7 Billion: Why is Porsche 'Cutting Ties'?
-
![]()
Don’t Dismiss Huawei’s Potential in Sedans Just Because the Shangjie Hasn’t Hit It Big Yet
-
![]()
Unsold Cars in China Find Success Overseas
-
![]()
Ghosn: Only I Can Save Nissan, Shareholders Beg Me to Return