From "Mapped" to "Mapless" and Then to "Light-Mapped": Why Is Choosing Autonomous Driving Maps Such a Complex Task?
 09/11 2025
09/11 2025
 564
564
Before the widespread adoption of mobile navigation, many people primarily relied on paper maps for travel. Some wished for highly detailed maps to access more traffic information; others found it more convenient to depend on road signs and ask passersby for directions; still others were accustomed to using simplified or hand-drawn maps that retained key information, enabling them to obtain crucial details more clearly.
Drawing an analogy between these habits and autonomous vehicles, we can see that they precisely align with the map technologies essential in the autonomous driving industry. In the early days of autonomous driving technology, the use of high-definition maps was widespread. However, as technology advanced, many companies began to explore mapless solutions. Nowadays, some companies have started to introduce "light-mapped" technology. Why has the evolution of autonomous driving maps been so turbulent?
Why Did Early Autonomous Driving Require "Maps"?
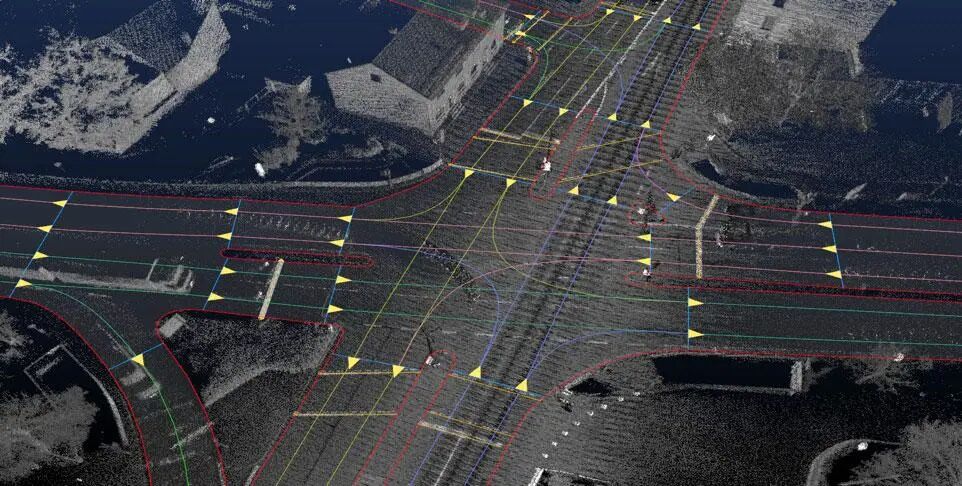
The core value of high-definition maps (often referred to as "mapped") lies in providing vehicles in advance with precise information about lane positions on roads, lane connections, fixed traffic signs, curb lines, parking lines, and other static information. This information significantly reduces the difficulty of vehicle localization and path planning. To put it simply, if you drive in an unfamiliar city, having a detailed navigation map allows you to know which lane to take, which turns are prohibited, and where parking is not allowed, making driving much less stressful. The same principle applies to autonomous vehicles: by "fixing" part of the environment, the machine only needs to handle dynamic elements (pedestrians, other vehicles, temporary obstacles), reducing the overall complexity and validation difficulty of the system. High-definition maps can also compensate for the limitations of cameras at night or under poor lighting conditions, achieving lane-level positioning accuracy, which is crucial for scenarios requiring high reliability.
However, there are numerous challenges in attempting to "map" the world in advance. Maps are not created once and for all, nor can they remain up-to-date effortlessly. Road construction, temporary signs, and pavement changes can render map information outdated, necessitating high-definition maps to be updated at any time. Moreover, creating a high-definition map that covers an entire city or even a country is extremely costly, involving the use of LiDAR, fleet data collection, extensive post-processing, and manual validation. If a high-definition map could indeed be "drawn" completely, its data volume would be enormous, requiring significant bandwidth and cloud support for real-time synchronization to each vehicle. For these reasons, many companies question the cost-effectiveness of using such a "thick map" in all scenarios when deploying autonomous driving.
Technical Details of the Mapless Approach: Relying on "Seeing" and "Learning" to Replace Maps?
Faced with the high costs of high-definition maps, some companies opt to minimize or avoid using maps altogether, relying instead on onboard sensors and large-scale data training to enable vehicles to "perceive the world clearly" on their own. This approach demands powerful camera perception, robust multi-sensor fusion, and massive amounts of scenario data for model training. In essence, the mapless solution delegates the problem to perception and learning: cameras and radar are used to perceive lane lines, traffic lights, pedestrians, etc. in real time; neural networks learn from historical data to make correct judgments in various complex situations.
To enhance the reliability of the mapless solution, certain measures must be taken to strengthen the robustness and usability of the models. For example, simulation and data augmentation can be employed to expand training data, with special collection efforts for rare scenarios; multi-modal fusion (combining information from cameras, millimeter-wave radar, IMUs, etc.) can compensate for the limitations of individual sensors; and online learning and fleet data feedback can enable continuous system iteration. The advantage of the mapless approach is its fast deployment and wide coverage, as it does not require pre-mapping every road, making it particularly suitable for companies aiming to rapidly expand their services.
While the mapless approach seems suitable for large-scale deployment of autonomous driving technology, it places extremely high demands on the model's generalization ability for certain edge scenarios (such as obscured road signs, faded lane markings, and complex intersections); the "black box" nature of end-to-end learning also makes fault tracing and regulatory review difficult. This necessitates extensive testing, redundant design, and safety boundaries to compensate for these shortcomings before technical deployment, which is not easily achievable in practice.
Technical Implementation of Light-Mapped Technology: Retaining Only the "Key Skeleton"?
Light-mapped technology (also known as sparse maps) attempts to strike a balance between "mapped" and "mapless" approaches. It does not aim to record every detail of the road surface or each road post but only retains the most critical and slowly changing information for vehicle decision-making. Light-mapped maps typically include the topological relationships of lane centerlines, connection information at important intersections, certain fixed traffic rule points, and a small number of landmark features. Compared to full-density point clouds, light-mapped data is much smaller in volume, allowing for lower update frequencies.
The process of generating light-mapped maps is also relatively engineering-oriented. Fleet vehicles equipped with LiDAR, cameras, IMUs, and other devices collect road test data, which is then initially registered using visual odometry or SLAM algorithms. Automated tools are used to extract lane lines and topological relationships, followed by a small amount of manual validation. To reduce maintenance costs, light-mapped maps often incorporate online change detection mechanisms, where driving vehicles report areas inconsistent with the map, and the cloud automatically compares and decides whether manual review or differential updates are needed. This approach retains the structural support of maps for localization and planning while delegating most update tasks to automated processes, making costs more controllable.
Light-mapped maps are typically used as structured priors for autonomous vehicle localization and planning, while real-time perception handles dynamic targets and variable information. For example, when merging onto a ramp, the light-mapped map provides lane connection relationships, and the planning module generates a safe trajectory based on this information, while cameras and radar monitor surrounding vehicles in real time for avoidance. This division of labor allows the autonomous driving system to maintain a certain level of robustness while avoiding the heavy operational and maintenance burdens associated with high-definition maps.
How Should Map Solutions Be Chosen?
There is no one-size-fits-all optimal choice for map solutions; much depends on the business scenario and commercial model. If the product operates within a limited area (such as factory premises, campuses, or closed highways), investing in high-definition maps combined with multi-sensor redundancy is often the most reliable path, as these scenarios can achieve high availability and verifiability with coverage of relatively few road segments. However, if the product aims to rapidly expand into cities or even nationwide, light-mapped or mapless solutions can significantly reduce upfront investment and expansion resistance.
In the future, autonomous driving maps may move toward "layering and fusion" rather than following a single route. Maps will be layered, with static and stable elements placed in the map and frequently changing elements handled by real-time perception; map production and updates will also become increasingly automated, utilizing change detection, fleet data differencing, and cloud-based differential updates to reduce manual costs. Meanwhile, research on perception, model validation, and interpretability in the mapless route will continue to advance, potentially blurring the boundaries between the two approaches.
Final Thoughts
Maps are neither a "panacea" nor a "redundant burden." By viewing maps as a module within the system and designing them together with perception, localization, planning, and validation systems, a suitable balance can be struck between cost, reliability, and expansion speed. The choice of map strategy largely depends on the scenarios to be addressed, the costs one is willing to bear, and preferences regarding expansion speed and safety boundaries. In the short term, we will continue to see various routes coexisting, which is not only an inevitability of technological diversity but also a complex game that the industry must undergo before reaching maturity.
-- END --
-
![]()
Enflame Tech's IPO Journey: Navigating Over 5.9 Billion Yuan in Losses and Soaring Debt in Q1 This Year
-
![]()
Trillion-Yuan Giant Li Shufu 'Streamlines': Could Levc Be the Casualty?
-
![]()
AI Competes for Electricity and Generates Power in the Gobi Desert
-
![]()
The First Batch of Victims of the AI Bubble: Programmers
-
![]()
ByteDance, DJI, and Xiaohongshu Secure Top Three Positions Among China’s Fastest-Growing Unicorns
-
Tesla's in-car voice system in China is finally learning to 'understand human language'
-
![]()
Foreigners Are Amazed: Chinese Electric Vehicle Drive Systems Unveil Innovative 'Poses'
-
![]()
700,000 Brothers and the Future of Robots: Behind JD.com's 'Nirvana Plan'






