Only by doing a good job in tactile perception can robots achieve true intelligence
 02/25 2026
02/25 2026
 670
670

Editor's Note: Tactile perception is the critical channel through which robots transform knowledge into action, and it is the underlying capability that determines whether they can operate with precision, stability, and adaptability in complex physical environments.
Tactile sensors are not just components that transmit pressure or force values; they involve a closed-loop synergy of materials, microstructures, electrical signal acquisition, modal analysis, and real-time control. This is a battleground where hardware, perception, and algorithms compete together.
To this end, Xinghe Frequency has specially planned a series of articles on tactile sensors, stepping beyond the components themselves to delve into the industrial transformation concerning perception accuracy, scenario adaptation, and technological inclusiveness.
Author | Mao Xinru
When discussing the progress of embodied intelligence, the focus has always been on the 'brain.'
However, attributing the problem solely to cognitive abilities easily overlooks another key factor: a robot's ability to translate knowledge into action largely depends on its perception of the physical world, especially tactile perception.
Tactile perception directly participates in the final execution and feedback loop of robots, transmitting contact status back to the controller at sub-second or even kilohertz speeds, enabling force control, slip compensation, and fine-tuning movements.
Without sufficiently precise and reliable tactile perception, many seemingly simple actions are difficult to achieve stably.
This lack of perception is becoming a major bottleneck for the implementation of embodied intelligence and is driving a massive incremental market.
According to incomplete statistics, by 2025, the domestic tactile sensor sector had completed 20 financing rounds involving 13 companies, with a total disclosed financing amount of nearly 1.8 billion RMB, representing a year-on-year increase of approximately 445%. Among these, seven rounds involved amounts of 100 million RMB or more.
Market research data shows that the global tactile sensor market reached 15.33 billion USD in 2024 and is expected to grow to 35.59 billion USD by 2031, with a compound annual growth rate (CAGR) of 12.8%.
Some aggressive forecasts suggest that if annual production of humanoid robots reaches 100 million units in the future, the tactile sensing market could expand into a vast space worth hundreds of billions of USD.
However, despite expectations in the tens of billions of USD, the industry is far from entering a standardized era.

Tactile Perception: An Indispensable Core for Robotic Sensing
While current VLA models have endowed robots with powerful perceptual capabilities, human understanding of the physical world extends far beyond mere visual perception.
The core logic of embodied intelligence is to achieve closed-loop interaction between perception, decision-making, and execution. This closed loop (closed-loop) completion relies on the synergistic effect (synergistic effect) of multimodal sensors, including vision, hearing, and tactile perception.
Among these, tactile sensors play a crucial role in enabling robots to perform human-like operations, ensure safe interactions, and adapt to environments.
Without tactile perception, robotic operations are limited to Extensive (rough) movements and cannot cope with complex and dynamic real-world scenarios. In many practical tasks, tactile perception is the key to success or failure.
Moreover, the importance of tactile sensors lies in their direct involvement in the robot's Bottom level control loop (low-level control closed-loop).
Visual signals typically have a delay of 30ms-100ms and are prone to occlusion, whereas tactile sensors can provide feedback on contact pressure, slippage, friction, and texture at kilohertz frequencies.
Vision is slow feedback, while tactile perception is a fast sensing loop.
From a bionic perspective, humans can perform Fine operation (delicate operations) because each square centimeter of the fingertip contains approximately 226 mechanoreceptors capable of capturing multidimensional mechanical signals such as pressure and torque in real-time and transmitting them to the brain for decision-making.
The core goal of tactile sensors is to simulate the perceptual capabilities of human skin, achieving high-density perceptual unit arrays and simultaneous decoupling of multidimensional forces. This represents a major technical pain point in the current industry and the focal point of competition among various technological routes.
Currently, the application of tactile sensors in the field of embodied intelligence has transitioned from laboratory research to industrial implementation.
It primarily revolves around three hardware platforms: grippers, dexterous hands, and robot bodies, while also generating clear value in extended directions such as embodied intelligence data infrastructure.
Grippers and dexterous hands are the most highly industrialized application platforms for tactile sensors.
By integrating high-sensitivity perceptual units into fingertips and finger pads, tactile sensors enable dexterous hands to perceive normal forces, shear forces, slippage trends, and object textures in real-time.
Tashan Technology is one of the leading players in this space. Its core product, the TS-F fingertip tactile sensor, integrates three functions: proximity detection, three-dimensional force measurement, and material recognition. With a force resolution of 0.01N, it can precisely output the distribution of forces.
In public demonstrations, dexterous hands equipped with its sensors have successfully completed tasks such as grasping eggs without breaking them, gently picking up tissues, and accurately picking up business cards.
Commercially, Tashan Technology has provided tactile perception solutions for leading companies such as Instinct Robotics and BrainCo. In 2025, its annual shipments reached tens of thousands of units, capturing over 80% of the domestic robotic tactile sensor market.
Robot bodies also have a certain demand for tactile sensors. Large-area, expandable flexible electronic skins enable robots to perceive the location and intensity of touches as well as approaching objects, ensuring interaction safety in human-robot coexistence.
Beyond hardware, the role of tactile sensors in software and data is also gradually becoming prominent. They serve as data entry points for real physical interactions, supporting large-scale tactile dataset collection and model training.
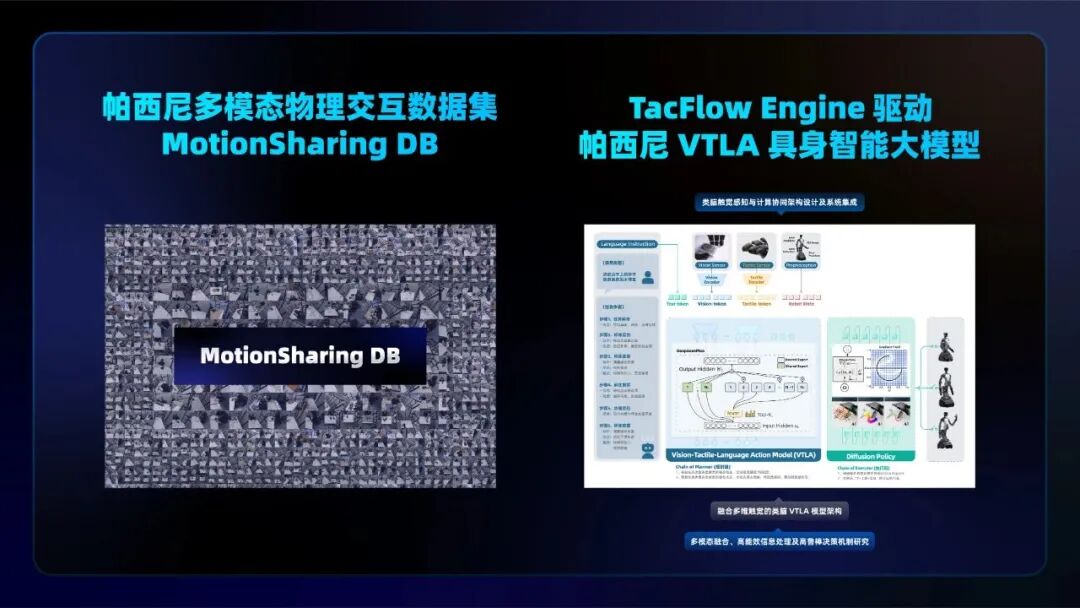
Leveraging its advantages in hardware and software technologies, Paxine Perception Technology has established the world's largest embodied intelligence data collection and model training base in Tianjin.
The base has the capacity to produce nearly 200 million full-modality embodied intelligence datasets annually and plans to open it up to the global ecosystem through a cloud marketplace, providing the industry with a high-quality data foundation that includes tactile perception.
In summary, as the perceptual core of embodied intelligence, the importance of tactile sensors continues to rise with the development of the embodied intelligence industry. The differentiated needs of various scenarios are also driving the iteration and innovation of various technological routes.

Five Mainstream Technological Routes for Tactile Sensors
Currently, the global tactile sensor market features a coexistence of multiple technological routes, each addressing the pain points of different scenarios through differentiated technical paths.
The mainstream technological routes in the industry can be divided into five categories: Hall-effect-based magnetic sensing solutions, visual-tactile solutions, capacitive solutions, spatially encoded multidimensional piezoresistive solutions, and multimodal fusion solutions.

The Hall-effect-based magnetic sensing solution is one of the more technically mature routes in the field of tactile sensors.
Its core advantages lie in strong anti-interference capabilities, fast response times, and the ability to achieve high-precision multidimensional force perception. It is primarily suited for high-end industrial and medical scenarios that demand high perceptual stability.
Paxine Perception Technology is a leading player in this route, having broken foreign monopolies through technological breakthroughs and becoming a domestic leader in magnetic tactile sensors.
Its third-generation multidimensional tactile sensor, PX-6AX-GEN3, can collect high-precision data from multilayer nested magnetic field array distributions at frequencies of millions of times per second, outputting information such as six-dimensional forces, torques, materials, and temperatures.
The visual-tactile solution involves installing a micro-camera inside the sensor to observe the deformation of an outer transparent elastic gel. Computer vision algorithms then analyze the displacement of markers on the gel's surface to obtain extremely high-resolution tactile information.
This solution offers the highest spatial resolution among all approaches, capable of not only sensing force but also 'seeing' the microscopic topography of objects. However, it has relatively high power consumption and typically results in thicker sensor modules due to the need for focal space.
Among domestic players, Daimeng Robotics has developed a proprietary monochromatic visual-tactile perception technology that addresses the pain points of traditional visual-tactile solutions, such as high computational demands, heat generation, and short lifespans.
Its DM-Tac series visual-tactile sensors are the world's first multidimensional high-resolution visual-tactile sensors.
The capacitive solution is the most widely applied and scaling (scaled) technological route in the field of tactile sensors. From a core principle perspective, it essentially converts changes in capacitance values into force signals.
Its core advantages lie in its simple structure, low cost, and ease of mass production, making it suitable for cost-sensitive scenarios such as mid-to-low-end industrial and service robots.
Players like Tashan Technology and Fulai New Materials have adopted this solution.
Among them, Tashan Technology has overcome the challenge of simultaneously parsing multidimensional tactile perception signals through its self-developed, globally pioneering hybrid analog-digital AI tactile sensing chip, limiting the number of simulated neurons per tactile unit to within 128 and significantly reducing manufacturing costs.
Currently, Tashan Technology has launched two sensor models: the TS-F, designed for dexterous humanoid robot hands, and the TS-E, suited for various grippers. The deployment of service robots using these sensors has exceeded several hundred units.
Additionally, Fulai New Materials recently signed a comprehensive strategic cooperation agreement with Lingxin Qiaoshou, under which the latter will procure 100,000 tactile sensors from Fulai New Materials.
This order sets a new global record for the delivery volume of robotic electronic skins.
The spatially encoded multidimensional piezoresistive route achieves multidimensional force field reconstruction through algorithm optimization by combining ultra-high-density single-dimensional piezoresistive sensitive layers with semiconductor processes to integrate spatially encoded layers.
Yuan Sheng Xian Da, an emerging player in the industry, has adopted this solution. Its product, MultiDT, is specifically designed for the fingertips of robotic dexterous hands, breaking through the performance bottlenecks of visual-tactile and Hall-effect-based tactile technologies.
At CES 2026, Yuan Sheng Xian Da publicly showcased its HexSkin series large-area skin sensors and Tacta series tactile sensors for the first time worldwide.
The multimodal fusion solution involves integrating two or more sensing principles within a single unit or tightly coupled modules to achieve complementarity across a wider operating range and environmental robustness.
Huaweike, another tactile sensor company with shipments exceeding 10,000 units, has chosen this path.
Its 'smallest' multidimensional integrated fingertip tactile sensor employs magnetic + resistive bimodal fusion technology, enabling three-dimensional perception. It can not only identify object slippage in real-time but also dynamically adjust gripping force.
This technological solution breaks the limitations of traditional single-sensing principles in the industry, exponentially increasing the richness and accuracy of perceived information.

Market Competition: A Chaotic Battle
The tactile sensor market currently features a diverse landscape of technological routes, intensifying price competition, and the preliminary formation of an industrial ecosystem.
The lack of technological convergence is determined by two main factors.
First, no optimal solution has been found for the current technological bottlenecks, forcing companies to seek breakthroughs through different technical paths without a perfect solution to address the pain points.
For example, the capacitive solution offers low cost but insufficient multidimensional force precision; the magnetic sensing solution provides high precision but at a high cost and is difficult to integrate over large areas; the visual-tactile solution offers high density but weak anti-interference capabilities; and the multimodal solution combines strengths but remains costly. Each route has its own insurmountable shortcomings.
Second, downstream application scenarios are fragmented, with industrial, medical, household, and specialty scenarios having vastly different demands for sensor precision, cost, size, and durability. This makes it difficult to form unified technical standards, allowing various technological routes to coexist long-term.
As the mass production of grippers, dexterous hands, and robot bodies continues to increase, the market demand for tactile sensors keeps rising, with scalable production capacity becoming a core competitive advantage for companies.
Currently, the players with the highest market shipments are Tashan Technology and Huaweike, both having shipped over 10,000 tactile sensors and accounting for the majority of the current market's scaled shipments.
Paxine Perception Technology also secured over 500 million RMB in orders throughout 2025, ranking first globally in product shipments within its Segmented technical route (niche technological route) and capturing over 80% of the market share.
Daimeng Robotics, after releasing its flagship visual-tactile sensor series in April 2025, has consistently held the top global position in shipments for similar products.
Leading companies are accelerating production expansion, driving the transition from small-batch deliveries to scaled mass production.
Scaled production inevitably leads to cost reductions, and the tactile sensor market has not been spared from an early price war.
The intense competition in the industry is evident from changes in unit prices. Five years ago, imported tactile sensors cost as much as 100,000 RMB each, whereas Paxine Perception Technology's products now start at just 199 RMB.
The emergence of price wars has deep-rooted causes.
On the one hand, scaled production has driven down costs. Leading companies have significantly reduced product manufacturing costs by expanding capacity, optimizing production processes, and developing core components in-house, creating space for price reductions.
On the other hand, the differentiated demands of the market also play a role. Mid-to-low-end scenarios are price-sensitive, and leading companies can quickly capture market share in these segments by lowering prices, expanding the application scope of their products, and promoting the widespread adoption of tactile sensors.
Moreover, the participants in the tactile sensor market are not limited to startups; the market has a broader range of players, forming a multi-tiered competitive landscape.
For example, Keli Sensing, a leading force sensor company listed on the A-share market, has invested in tactile sensor startups such as Yuansheng Technology. This combination of industrial capital and startups helps accelerate technological R&D and industrialization.
However, the tactile sensor industry also faces challenges. Tactile data is discrete and difficult to correlate, and each flexible contact may yield different data, posing significant challenges for training models.
Even some ontology enterprises have indicated that many data models with haptic information cannot be effectively processed or even "ingested" during model training.
Therefore, some companies have started to seek solutions at the chip level. For example, Tishan Technology has developed an AI haptic chip for spiking neural networks to enable low-latency, low-power data processing.
From a longer-term perspective, some leading companies are no longer satisfied with being mere hardware suppliers; instead, they aim to build a haptic large model ecosystem. Companies like Daimeng and PaXini Perception Technology have already launched relevant VTLA model achievements.
The competition in haptic sensors is quietly shifting from hardware parameter comparisons to securing positions in data ecosystems and model capabilities.
Undoubtedly, haptic sensors are at a critical juncture transitioning from technological demonstration to engineering and large-scale implementation.
In the short term, capacitive and piezoresistive approaches have advantages in cost and mass production, while visual-haptic and magnetic approaches hold value in high-precision and differentiated scenarios.
In the medium term, multimodal fusion and dedicated sensing-computing chips will become the dividing line. Those who can simultaneously balance information density, reliability, and cost are likely to establish barriers in high-end applications.
For embodied AI as a whole, we are standing at the watershed between logical intelligence and physical intelligence, with the next three years representing a window to turn knowledge into action.
-
![]()
Smartphone Prices Surge Amid Manufacturer Anxiety
-
![]()
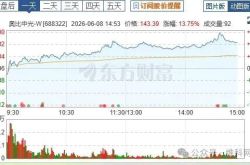
Orbbec Soars to Record Heights, Eyes Further Capital Influx of 980 Million!
-
![]()
Tongding Interconnect Sets Up Shop in Shaoguan with 800 Million Yuan in Registered Capital
-
![]()
Before Kimi’s A-Share Debut, Zhipu Aims to Secure More 'Strategic Funding'
-
![]()
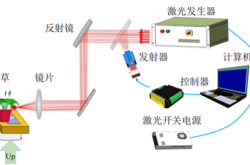
Innovative Leap | Fiber-Pluggable 1470nm Laser Source: Revolutionizing Precision Laser Weeding
-
![]()
73-Day Rapid Listing: Where Does Unitree's Wang Xingxing's 'Sense of Urgency' Come From?
-
![]()
AI Project Mindverse, Backed by Meituan, Faces Data Inflation Allegations Over Its Macaron Product
-
![]()
3000-word In-Depth Analysis | What Makes Physical AI So Magnetic? It Has Captivated Masayoshi Son, Jensen Huang, and Justin Sun All at Once