The Tipping Point for Robotics: Wang Xingxing on Embodied AI’s ‘ChatGPT Moment’
 03/18 2026
03/18 2026
 642
642
Produced by Zhineng Technology
As the physical world starts to embrace logic, the NVIDIA GTC Conference buzzes with anticipation and energy.
For the past few years, the AI boom has largely been confined to the digital domain: text, images, and model reasoning. However, this year’s spotlight has shifted to Embodied AI.
In Wang Xingxing’s (Founder of Unitree Technology) talk, ‘How to Achieve the ChatGPT Moment for Embodied AI,’ he tackles a question that has long perplexed the robotics community: Why is it so simple to get machines to write poetry, yet incredibly challenging to have them pour a glass of water as steadily as a three-year-old child?

The rise of ChatGPT has signaled the emergence of logic in the digital realm, while the physical world eagerly awaits its own breakthrough moment.
01
Redefining Boundaries:
What Truly Constitutes the ‘ChatGPT Moment’?
For the past decade, the robotics industry has been stuck at the ‘marionette’ stage.
Whether it’s robotic arms operating in factories or delivery robots navigating through restaurants, they are essentially bound by rules: programmers write if-else instructions, dictating what to do at point A and what to avoid at point B.
Wang Xingxing refers to this as ‘pseudo-intelligence’—excellent performance in structured environments.
True Embodied AI demands generalization: When placed in an unfamiliar kitchen, a robot should behave like a novice apprentice, visually scanning the environment, identifying the sink, rag, and cup, and autonomously planning a sequence of actions—grasping, rinsing, and drying—based on a single instruction: ‘Help me wash this cup.’
To quantify this idea, he introduces the ‘80-80 Rule’: achieving about 80% task completion in 80% of unfamiliar environments using only verbal instructions.
◎ Environmental Unfamiliarity: The robot’s perceptual coding ability must be robust enough to accurately locate targets even in low lighting, cluttered spaces, or complex terrains.
◎ Task Completion Rate: The robot must handle unexpected dynamic issues, such as ‘cup slipping’ or ‘water splashing,’ without prior rehearsal.
Only by surpassing this threshold can robots evolve from ‘expensive industrial decorations’ into integral social infrastructure. As for the timeline, this ‘ChatGPT Moment’ could arrive in as little as 1-2 years or take up to 2-3 years.
While the digital world can breakthrough through sheer computational power, the physical world contends with gravity, friction, and unpredictable emergencies—here, the challenge lies not just in bits colliding but atoms competing.
02
Core Technical Hurdles:
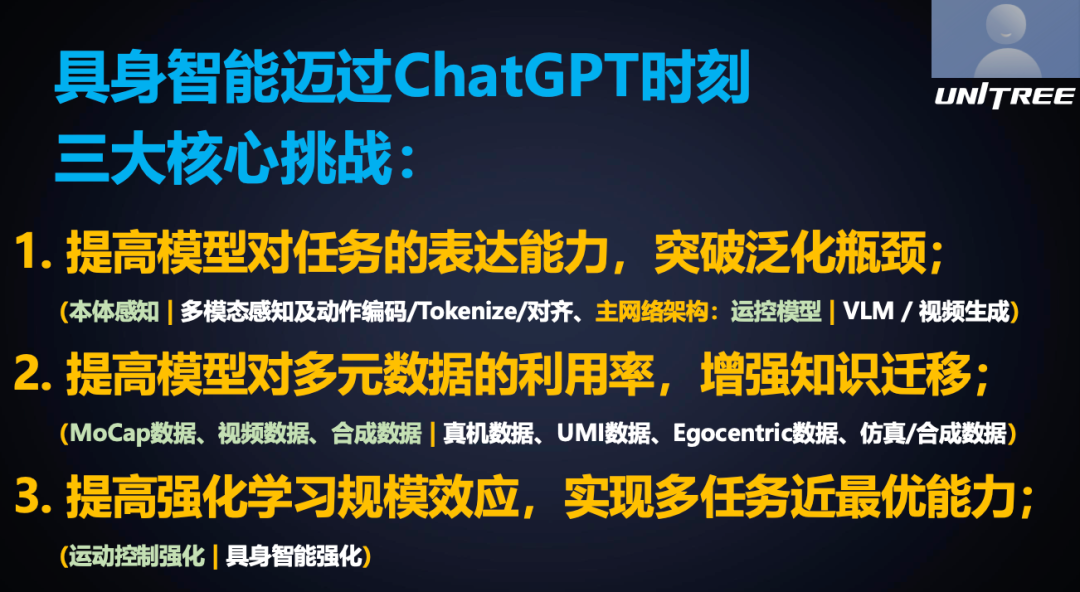
Three Deep Challenges
The delay in Embodied AI stems from three fundamental technical barriers, which Wang Xingxing vividly describes as the robot’s ‘underdeveloped cerebellum,’ ‘lack of experience,’ and ‘fragmented memory.’
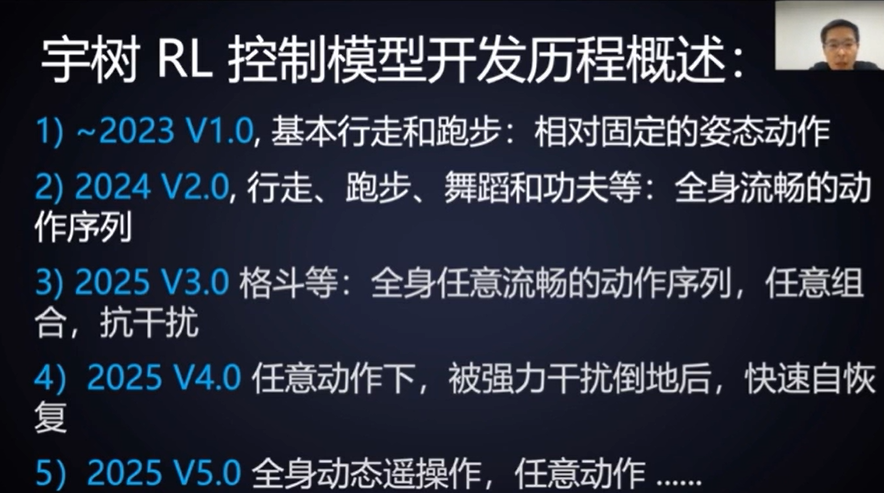
● The High-Dimensional Challenge of Motion Expression
Grasping a raw egg may seem straightforward, but it involves the high-frequency coordination of hundreds of muscle fibers and nerve endings. For humanoid robots, this translates to synchronizing dozens of joint degrees of freedom (DoF) within milliseconds.
Most robots today are limited to discrete actions like ‘walk over,’ ‘reach out,’ or ‘grab,’ but real-world motions require smooth, continuous combinations. Transient control is especially critical: balancing adjustments while walking on slippery surfaces demand models with extremely high reasoning speed and motion encoding-decoding capabilities.
● The Data Scarcity Dilemma
Unlike large language models, robots cannot consume the entire internet for ‘training.’ Wang Xingxing suggests a ‘hybrid feeding’ approach:
◎ Internet videos as the main course: Robots build initial awareness of the physical world by observing human operation videos.
◎ Simulated synthetic data as snacks: Billions of trial-and-error attempts—falling, grasping—in digital twin environments.
◎ Real-machine fine-tuning as the soul: Using a small amount of high-quality real-world data to refine and align the model.
The focus here is not on data volume but on data utilization efficiency.
● The Myth of Reinforcement Learning’s Scalability
Reinforcement learning is often seen as the key to AGI in AI, but robots face a ‘use-and-discard’ problem: training to open a door may require massive data, yet these experiences are often non-reusable.
Wang Xingxing stresses the need for an accumulative strategy library, enabling new task learning to borrow logical fragments from old tasks—just as the balance sense acquired from riding a bicycle transfers to riding a motorcycle.
03
Hardware and Application Evolution:
From Lab to Social Infrastructure
Hardware advancements are crucial for implementing Embodied AI. Unitree Technology’s product lineup illustrates a clear progression: from small research platforms to industrial operations and finally to complex environmental adaptability.
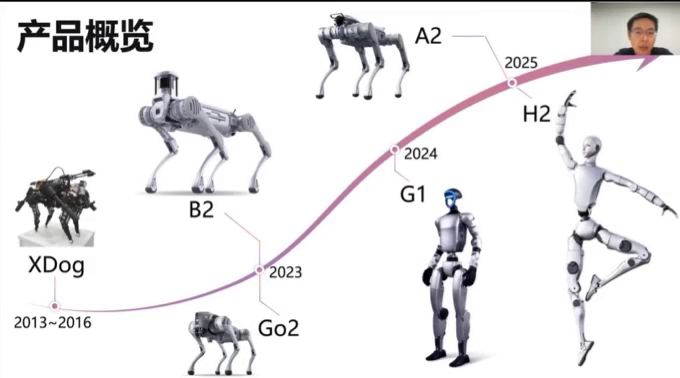
● G1: The Geek Pioneer of Humanoid Robots
Standing at 1.3 meters, the compact and agile G1 prioritizes packing sufficient degrees of freedom and sensors into a limited volume rather than raw power. It has become a standardized platform for global developers to experiment with motion algorithms.
● H1: Industrial Muscle Labor
Standing at 1.8 meters, the H1 emphasizes productivity and safety. In medium-to-large operation scenarios, it maintains a 2-3 meter safety distance from humans and independently completes workstation tasks. This represents a reconstruction of future factory robot logic: no longer a neighboring assistant but an independent digital craftsman.
● As2: Lightweight Patroller
The quadrupedal robot As2 is designed for patrolling complex terrains, featuring high protection, high payload capacity, and long endurance. It gathers real outdoor environmental data for AI algorithms, acting as a special forces unit before the ‘ChatGPT Moment’ arrives.
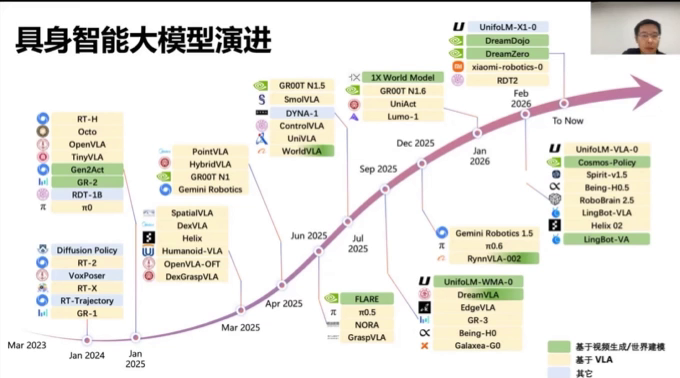
AI advancements are also being realized in hardware: world models and VLA (Visual-Language-Action) models enable robots to engage in ‘daydreaming’ in simulated and real environments, predicting action outcomes and environmental feedback to gradually improve success rates in production scenarios.
Global collaboration and open-source strategies ensure that knowledge fragments and algorithm accumulations are no longer confined to individual labs but form a transferable industrial-grade intelligence ecosystem.
Summary
The future of Embodied AI will reshape social productivity and lifestyles. Wang Xingxing believes that when dawn breaks, robots will become ‘iron colleagues,’ coexisting with humans in the physical world, and we must understand, plan, and make good use of this technological transformation.
-
![]()
Zhao Ming Departs, IPO Postponed, AI Phones Underperform—Can Honor Still Live Up to Its Name?
-
![]()
Explosion of Recording Hardware! Four Major Product Categories Compete for New AI Entry Points, with Agent Capabilities Becoming Standard
-
![]()
China’s LEO Satellite Internet Achieves Strategic Progress: Over 100 Additional Satellites Set for Launch
-
![]()
Musk Sustains $88 Billion Loss in AI Pursuit, Now Rents GPUs to Rivals, Anticipating $500 Billion Revenue Over Three Years
-
![]()
Report | Token Economics: Envisioning a New Path for RMB Internationalization
-
![]()
Trends丨Gartner's Latest Forecast: These Seven Transformations Will Reshape the Technology Landscape Over the Next Five Years
-
Betting on Embodied AI: Bosch's New Game Plan in China
-
![]()
WeChat Collaborates with Huawei/Honor/Xiaomi on A2A: Is This the Dawn of AI Integration?






