In-Depth Analysis | Tesla FSD V14.3: The 'Final Piece' of Full Self-Driving in Elon Musk's Vision!
 04/09 2026
04/09 2026
 386
386
Tesla FSD V14.3 (software version 2026.2.9.6) officially began a wider rollout in early April 2026. Dubbed by Elon Musk as the 'final piece' of full self-driving, this update is far more than a routine fix for specific scenarios—it represents a complete overhaul of the system's underlying architecture.

For professionals closely following the evolution of autonomous driving products and AI engineering implementation, V14.3 demonstrates how to achieve qualitative improvements across three dimensions—computing infrastructure, perception networks, and data flywheels—when transitioning from 'rule-driven' to 'purely data-driven' approaches. Below is a detailed breakdown and summary of the version's core features, performance improvements, real-world evaluation conclusions, and technical highlights.
After reading, you'll understand the trajectory of autonomous driving product technology evolution and the core technical points behind it.
1. Official Core Features and Performance Improvements (Release Notes)
The improvements directly listed by Tesla AI (already rolling out) are as follows:

20% Faster Response: The AI compiler and runtime have been completely rewritten from the ground up using the MLIR (Multi-Level Intermediate Representation) framework, enabling faster vehicle perception-decision-execution cycles and more confident split-second decisions.
More Decisive and Intelligent Parking: Significant improvements in parking spot selection and maneuverability decisiveness; a new 'P' icon on the map predicts parking locations; automatic control maintenance and recovery during temporary system downgrades reduce unnecessary takeovers (laying the groundwork for future advanced auto-parking features like Banish).
Optimized Handling of Complex Scenarios:
Better handling of complex intersection traffic lights (compound lights, curves, yellow light stops).
Enhanced responses to emergency vehicles, school buses, right-of-way violators, and rare vehicles.
Improved handling of small animals (RL training focuses on hard examples + proactive safety rewards).
Better recognition and avoidance of rare/abnormal objects (protruding, hanging, or tilting into the lane, such as low branches or construction equipment).
Enhanced Perception and Low-Visibility Performance: Upgraded neural network vision encoder with stronger 3D geometric understanding and traffic sign recognition, delivering better performance in low-visibility scenarios (rain, fog, nighttime).
More Human-Like Driving Behavior: Reduced off-center lane biasing and slight tailgating; overall smoother and more decisive operation with fewer interventions.
Others: Cybertruck achieves full feature parity with Model Y and other models in FSD capabilities, adding 'Parked Blind Spot Warning' (to prevent door collisions with people/vehicles/bicycles when parked).
Upcoming Blockbuster Features Preview (Upcoming Improvements)
In the release notes for 2026.2.9.6, Tesla also explicitly previewed several killer features set to be introduced in subsequent minor updates:
Extended Global Behavior Reasoning (Expand reasoning to all behaviors): Currently, the system's reasoning primarily focuses on reaching the destination. In the future, the end-to-end model's reasoning capabilities will cover every nuanced driving behavior from start to stop, achieving true full-domain end-to-end operation.
Pothole Avoidance: This highly anticipated feature will soon be implemented, enabling vehicles to proactively identify road potholes and plan smooth avoidance maneuvers.
DMS Driver Monitoring System Upgrade: The in-cabin monitoring system's sensitivity will be further enhanced, with targeted optimizations for driver gaze tracking, eye wear handling (sunglasses/glasses recognition), and accuracy under complex and varying lighting conditions.
2. Real-World Testing Experience and Performance Upgrade Summary
Combining firsthand driving experiences from multiple early testers on YouTube (such as Chuck Cook, Whole Mars Catalog, Dirty Tesla, Sawyer Merritt, Ananto, etc.) with feedback from professional tech media, FSD V14.3 demonstrates extremely high maturity in real-world testing. The underlying AI compiler reconstruction and 20% faster response speed deliver immediate and tangible effects in actual driving.

Below is a detailed summary of the driving experience and performance upgrades in FSD V14.3:
'Leapfrog' Improvements in Response Speed and Safety
The officially claimed '20% faster response' is extremely noticeable in real-world testing, with the vehicle handling emergency and edge scenarios more effortlessly:
Enhanced Extreme Risk Avoidance: Tester Dirty Tesla encountered a sudden illegal lane change by another vehicle during testing; FSD V14.3 reacted instantly and successfully avoided a severe collision.
Instantaneous Braking for Blind Spots and Sudden Obstacles: When encountering pedestrians suddenly stepping into the lane at night or a neighboring car suddenly reversing out of a parking spot, the vehicle can brake almost instantly, responding even faster than human drivers.
Acute Environmental Capture: The vehicle reacts faster and more accurately to yellow lights. Some testers (Ananto) observed that the vehicle triggered a rapid, slight emergency brake in response to merely 'a falling leaf' flying across the road (the system classified it as a small object/animal requiring caution).
More Decisive Starting at Intersections: At stop signs, the vehicle now starts much more crisply and decisively, completely eliminating the persistent issue in previous versions of 'double stopping' (hesitating twice) before the white line.
Optimized Decisiveness and Navigation Logic
The system's lane-changing and route-planning logic in complex conditions has become smarter and more proactive:
No More 'Hesitant' Lane Changes: Tester Sawyer Merritt found that previous versions often exhibited the awkward situation of 'signal activated but lane change delayed,' whereas in V14.3, the vehicle changes lanes decisively and smoothly as soon as the turn signal is activated.
More Proactive Navigation Preparation: Veteran tester Chuck Cook noticed that on highways, the vehicle now begins moving right to prepare for exits 1.5 to 1.7 miles (about 2.4–2.7 km) in advance, rather than frantically forcing its way over at the last 0.6 miles as before.
Ability to 'Read' Signs and Correct Faulty Maps: Even if the navigation map provides an incorrect route (e.g., instructing the vehicle to turn onto a one-way street against traffic), FSD can now visually recognize 'Do Not Enter' signs by the roadside and proactively refuse to execute the erroneous turn instruction.
More 'Human-Like' Driving Experience
Multiple testers unanimously used the term 'more human-like' to describe this software version, with the robotic stiffness significantly reduced:
Extremely Smooth Acceleration/Deceleration: Whole Mars Catalog pointed out that the vehicle's acceleration and deceleration transitions now feature a very natural 'gradient,' completely eliminating mechanical jerkiness.
Improved Lane Biasing and Following Distance: Reduced unnecessary driving along the left lane line, with more natural following distances, alleviating slight rear-end collision tendencies.
Mad Max Mode Optimization: On models like the Cybertruck, the previous Mad Max mode's overly aggressive starts caused discomfort; now, after retuning, it becomes both progressive and comfortable, handling roundabouts beautifully and aggressively.
Parking: Surprises and Limitations
Due to the introduction of more advanced reasoning capabilities, parking is a major focus of this update, but real-world performance remains mixed:
Success Cases:
A new 'P' icon appears on the map to predict parking spots.
Whole Mars Catalog perfectly parked in one attempt in a multi-story parking garage (previous versions often got lost or circled endlessly inside).
Dirty Tesla experienced extremely precise parking in extremely narrow spaces (very close distances on both sides), completing the maneuver in one fluid motion. Ananto also quickly located a vacant spot and parked in a busy Costco parking lot.
Failure/Limitation Cases:
Chuck Cook found the vehicle circling the block indefinitely after arriving at the destination, even missing a perfect vacant spot right in front, lacking true 'reasoning' flexibility.
Dirty Tesla's vehicle parked perfectly but failed to recognize it as a 'police-only' spot.
Ananto pointed out that when reversing into a spot and encountering a curb, the vehicle still has a small probability of hitting the curb due to the rear camera's blind spot after clearing it.
UI Interface and Other Detail Updates
New Camera Obstruction Warning: When camera views are blocked, the warning prompt changes from a small thumbnail to a full-window view, allowing drivers to immediately see exactly what is obstructed.
3. Core Technical Highlights—Underlying Infrastructure for Physical World AI
In fact, the biggest draw of this update lies in the comprehensive upgrade of the underlying architecture, paving the way to accommodate explosively growing end-to-end large models (and even world models):
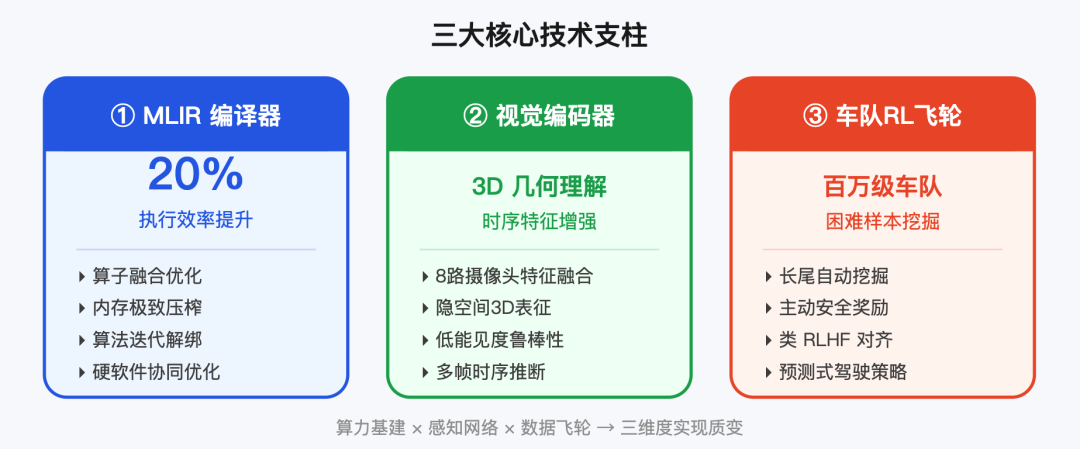
MLIR Framework Reconstructs AI Compiler and Runtime: Efficient 'Infrastructure' for End-to-End Models
As FSD moves toward a pure end-to-end architecture (evolving toward large VLA or even world models), neural network parameter counts explode exponentially. Traditional compilers often require extensive manual operator optimization for both in-vehicle hardware (HW3, HW4's NPU) and cloud training hardware (Dojo, H100), creating a massive bottleneck for algorithm deployment.
Unified Compilation Pipeline: MLIR (Multi-Level Intermediate Representation) is part of the LLVM (Low Level Virtual Machine) open-source project. By adopting MLIR to rewrite the AI engine from scratch, Tesla completely abandoned their previously patchwork optimization toolchain, establishing a standardized intermediate representation layer. This framework automatically and efficiently maps complex upper-layer AI algorithms (such as various large-parameter Transformer or MoE structures) onto underlying chips.
Operator Fusion and Extreme Memory Optimization: In physical world AI (Physical AI) applications, latency is a life-saving metric. MLIR enables deep operator fusion and memory allocation optimization during compilation, minimizing data movement within video memory (VRAM) to the greatest extent possible. This is why, under this new Runtime, FSD achieves a 20% boost in response speed under equivalent hardware conditions.
Algorithm Iteration Decoupling: This underlying engineering breakthrough frees the algorithm team from hardware adaptation constraints. Faster model iteration speeds mean significantly reduced compilation costs when validating new network topologies in the future.
Vision Encoder Upgrade: Breaking Through the Physical Limits of Pure Vision Perception
In an end-to-end system, the Vision Encoder serves as the vehicle's 'optic nerve,' responsible for real-time compression of 2D pixel streams from 8 cameras into high-dimensional feature vectors (Tokens) containing spatiotemporal information for the rear-end Policy Network's reasoning and decision-making.
3D Geometric Understanding in Latent Space: Past visual perception often relied on explicit occupancy networks to construct voxels. The upgraded Vision Encoder now possesses stronger latent representation capabilities, enabling more native understanding of real-world 3D physical structures. This allows the system to handle irregular and uncommon geometric forms (e.g., branches extending over the road, oddly shaped construction machinery, tilted obstacles) with extreme precision. This technology was also a topic shared in our previous GTC series articles that major automakers (domestic and foreign) will focus on this year, such as the architecture and algorithm applications of Li Auto's next-generation foundation model Mind VLA-o1 discussed in 'Li Auto's Next-Gen Foundation Model Mind VLA-o1: Architecture and Algorithm Application Analysis,' and NVIDIA's Alpamayo in 'NVIDIA Alpamayo: Design and Mass Production Deployment of Inference-Based Autonomous Driving Large Models.'
Enhanced Temporal Feature Extraction (Temporal Processing): In low-visibility scenarios like rain, fog, or nighttime, single-frame images often suffer from severe feature loss. The new encoder significantly strengthens processing depth in the temporal dimension, allowing the system to rely not just on 'seeing this instant' but also on continuous temporal changes across multiple frames to 'mentally fill in' and confirm traffic signs, lane markings, and dynamic obstacle trajectories, greatly improving perception robustness in harsh environments.
Global Fleet Learning (Fleet Learning) + Reinforcement Learning (RL): The Ultimate Form of the Data Flywheel
Pure 'imitation learning (behavioral cloning)' can only make the system approximate an 'excellent human driver.' To achieve qualitative improvements and handle long-tail scenarios, explicitly value-driven reinforcement learning must be introduced.
Mining Hard RL Examples: Tesla leverages its global fleet of millions of vehicles equipped with HW3/HW4 (based on Shadow Mode) to construct a highly scalable automated pipeline for mining long-tail data. When the system detects scenarios where human drivers perform emergency takeovers at complex intersections with traffic lights, navigate sharp curves, or encounter extremely rare situations (Infrequent Events), these high-value 'hard examples' are automatically transmitted back and annotated.
Introducing 'Active Safety Rewards' for Network Alignment: This approach shares a similar logic with RLHF (Reinforcement Learning from Human Feedback) in large language models. Within its training clusters, Tesla has designed a more rigorous and forward-looking reward function (Reward Function) for reinforcement learning.
4. In Conclusion:
Overall, FSD V14.3 represents a significant leap from 'application-layer patching' to 'foundational reconstruction.' It provides a highly valuable engineering blueprint for the entire industry—whether for XPENG's continuous evolution in intelligent driving architecture or LIXIANG's planning for next-generation VLA algorithms, all must transition from merely relying on computational power to focusing on operator optimization, model distillation, and seamless hardware-software collaboration.
In summary, FSD V14.3 is not a mere patch but a foundational computational revolution beginning with the MLIR framework. By leveraging a 20% improvement in execution efficiency and a vastly expanded pool of hard examples, it is rapidly propelling Tesla's intelligent driving system from 'functional' to 'smooth, safe, and reliable.'
*Reproduction or excerpting without permission is strictly prohibited-
-
![]()
Geely and BYD Step Up Efforts: Giants Aren't Willing to Lose in the Breakthrough Battle for New Energy Pickups
-
![]()
From Selling Computers to Selling AI: How Far Has Lenovo Come?
-
![]()
What Enlightenment Does the Successfully Verified Trillion-Dollar Anthropic Bring to SaaS Enterprises?
-
![]()
Li Auto L9 Livis: Caught Between 'Daddy Car' and 'AI'
-
![]()
From 'Flying Machines' to 'Embodied Intelligent Agents': How Embodied Intelligence is Revolutionizing the Commercial Landscape of Low-Altitude Equipment
-
![]()
Launch of the Lynx S10: Why is DeepRobotics Developing a Small Wheeled-Legged Robot?
-
![]()
AI Accelerator: The Powerhouse Behind AI Algorithm Operations and Applications
-
![]()
Ferrari Luce Electric Debuts: Ferrari’s Essence Endures in the Electric Age | On-Site Report