Why FMCW LiDAR Holds the Key to the Future of Autonomous Driving?
 03/10 2026
03/10 2026
 666
666
In the realm of autonomous driving environmental perception technologies, LiDAR has consistently been at the forefront. As a pivotal sensor capable of delivering high-precision three-dimensional spatial data, LiDAR technology is transitioning from traditional pulsed Time-of-Flight (ToF) systems to Frequency-Modulated Continuous-Wave (FMCW) coherent detection.
Although the majority of commercially available LiDAR systems currently employ pulsed ranging technology, FMCW LiDAR is widely acknowledged by the industry as the ultimate solution for achieving fully solid-state, chip-based perception. This is attributed to its ability to directly measure instantaneous velocity, its exceptional sensitivity, and its inherent anti-interference capabilities.
What Are the Advantages of FMCW LiDAR?
Traditional LiDAR predominantly relies on Time-of-Flight technology, functioning similarly to echolocation. A laser emits an extremely brief, high-energy optical pulse that travels through space, collides with objects, and reflects back. The receiver calculates the time difference between emission and reception, combining this with the speed of light to determine the distance.
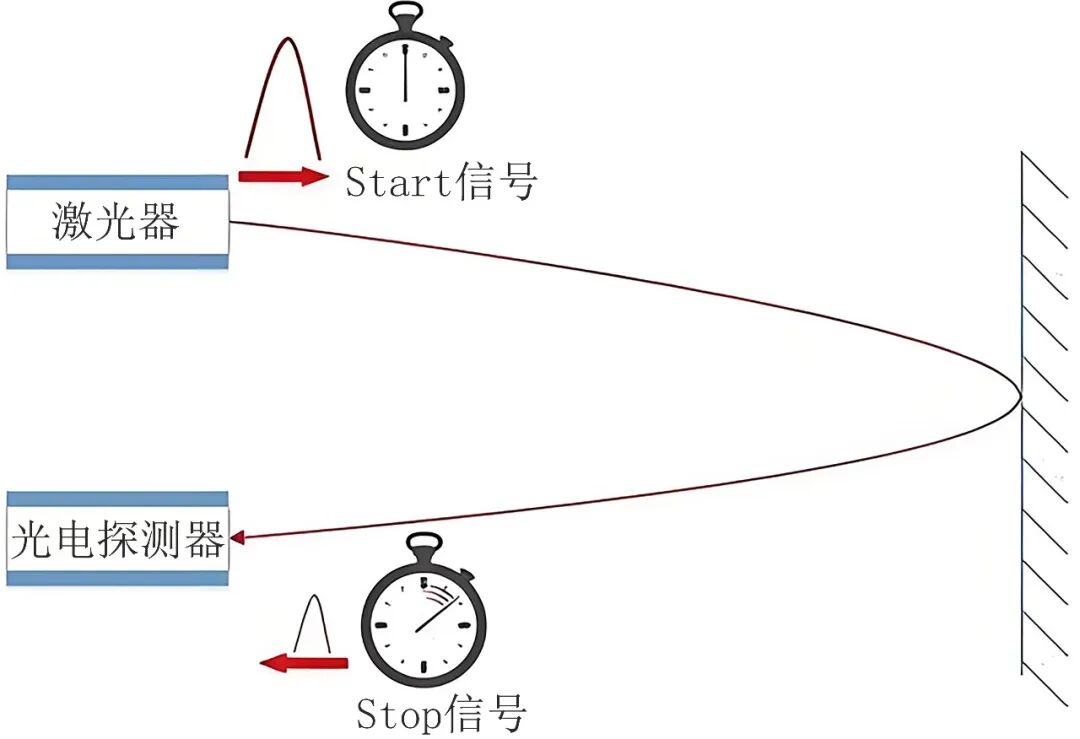
Image Source: Internet
This method is intuitive and relatively simple in terms of technical complexity. However, it fundamentally relies on the direct detection of light intensity, which limits the efficiency of light energy utilization and makes it challenging to distinguish environmental interference light.
In contrast, FMCW LiDAR operates within the domain of wave phase and frequency fluctuations. Rather than emitting isolated pulses, it continuously transmits a beam of light whose frequency changes linearly over time—a waveform known as a chirp signal.
When this continuous beam encounters a target and returns, the time delay incurred during propagation results in a frequency difference between the echo signal and the currently emitted laser frequency. This frequency difference is directly proportional to the target's distance.
The core technology of this measurement method lies in coherent detection, where the weak reflected optical signal is superimposed and mixed with a local reference beam at the receiver. This mixing process produces a "beat frequency" phenomenon on the detector, converting extremely high-frequency optical wave interference into lower-frequency electrical signals for easier backend circuit processing.
Coherent detection endows the system with an exceptionally high dynamic range, as the local reference beam acts as an optical amplifier, enabling the radar to detect extremely low-power echoes. This mechanism allows FMCW LiDAR to achieve long-range detection over hundreds of meters using only milliwatt-level power, significantly lower than the hundreds of watts of peak power typically required by pulsed radars.
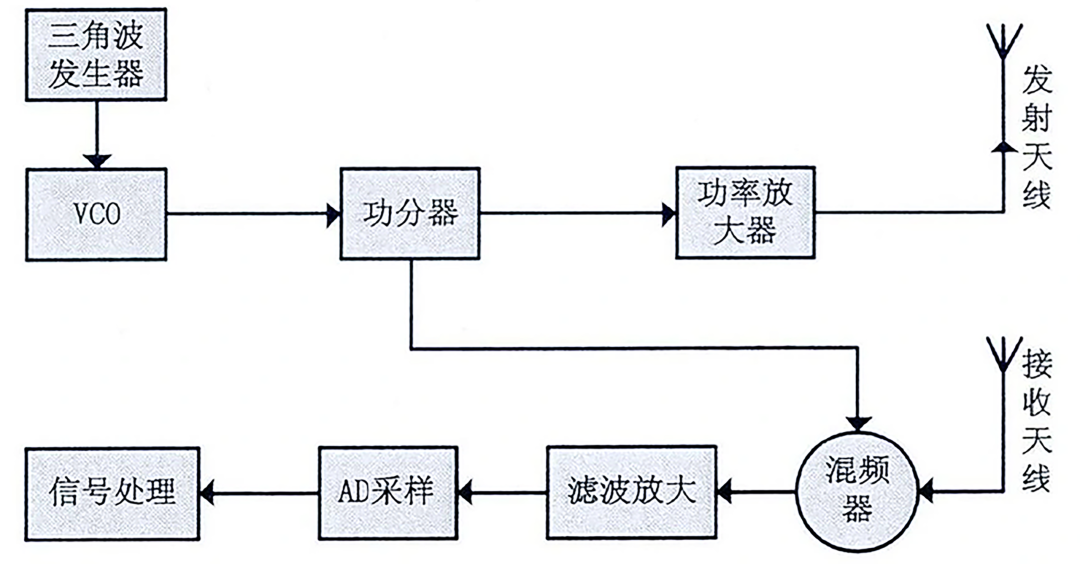
Schematic of Frequency-Modulated Continuous-Wave. Image Source: Internet
Beyond distance, velocity represents another critical dimensional enhancement for FMCW LiDAR. Due to its continuous-wave emission, the system can leverage the Doppler effect of light. When a target object moves relative to the radar, the frequency of the reflected light shifts. By analyzing the two beat frequency signals generated during the rising and falling edges of the chirp signal, algorithms can simultaneously resolve both distance and the object's instantaneous radial velocity.
This means LiDAR no longer merely provides static three-dimensional coordinates but outputs "four-dimensional point clouds" with inherent velocity vectors. This enhanced capability is crucial for autonomous driving decision-making systems, enabling vehicles to identify object motion states within a single frame without relying on multi-frame image comparisons to calculate displacement, thereby significantly reducing reaction times for emergency obstacle avoidance.
This transition from "intensity detection" to "coherent detection" represents an upgrade in the underlying implementation of perception logic. In complex traffic environments, because coherent detectors only respond to signals that perfectly match the local oscillator frequency, external sunlight or disordered optical pulses emitted by nearby vehicles appear merely as background noise incapable of forming interference. This inherent anti-interference characteristic resolves the potential signal mutual interference issues that could arise among LiDAR systems as autonomous vehicles become more widespread.
What Are the Challenges of FMCW LiDAR?
Given the significant advantages of FMCW LiDAR over traditional pulsed systems, why hasn't it seen widespread adoption yet?
The primary challenge in realizing FMCW LiDAR lies in its extreme requirements for the light source (laser). FMCW radar demands lasers with ultra-narrow linewidths, typically requiring kilohertz-level or even lower specifications. Linewidth represents the purity of the laser frequency; if the laser output exhibits severe frequency jitter, the resulting phase noise will directly overwhelm the beat frequency signal, causing a substantial decline in ranging accuracy or even rendering coherence unmaintainable over long distances.
Currently, mainstream semiconductor lasers struggle to maintain such high frequency stability while sustaining sufficient output power over extended periods, necessitating the introduction of complex external resonant cavities or specific feedback control mechanisms.
Another major obstacle to FMCW LiDAR proliferation is the linearity of frequency scanning. The physical foundation of FMCW radar operation is the perfect linear increase of frequency over time. However, in practical engineering, lasers often exhibit nonlinear frequency drift during modulation due to carrier concentration variations, temperature fluctuations, and hysteresis in the piezoelectric effect.
Even minor nonlinearities, measured in small percentages, can cause broadening and distortion of the Fourier-transformed beat frequency signal, degrading radar resolution from centimeter-level to decimeter-level accuracy. To correct these deviations, extremely complex control systems—such as optoelectronic phase-locked loops (OPLL) or pre-distortion correction currents—must be introduced. While these methods enhance performance, they also drive up system computational power consumption and hardware costs.
Ultimately, FMCW LiDAR aims to achieve silicon photonics integration. This entails integrating dozens of precision optical components—including the laser source, modulator, optical waveguides, phase shifters, and detectors—onto a silicon chip roughly the size of a fingernail.
Although silicon-based photonic technology has found applications in optical communications, automotive environments impose far more stringent requirements on optical power, detection range, and operating temperature ranges than data centers. Silicon itself is not an ideal luminescent material, necessitating the use of compound semiconductors like indium gallium arsenide phosphide (InGaAsP) for the laser source. Integrating these heterogeneous materials with silicon substrates while minimizing losses represents a significant challenge in contemporary semiconductor manufacturing.
Additionally, lasers encounter waveguide losses during transmission within the chip and face coupling challenges when emitted into free space, both of which diminish the final detection range.
Beyond optoelectronic challenges, backend data processing also confronts immense computational demands. Coherent detection generates beat frequency signals that require high-frequency sampling and real-time Fast Fourier Transform (FFT) processing to extract distance and velocity information.
Compared to the simple timing logic of pulsed radar, FMCW radar generates several orders of magnitude more data. Designing efficient Application-Specific Integrated Circuits (ASICs) to handle this massive computational load within the confined space and strict power consumption constraints of automotive systems represents a critical hurdle.
Commercialization Obstacles for FMCW LiDAR
Although FMCW represents the future of LiDAR technology, numerous challenges remain in its commercialization journey. The autonomous driving industry currently exhibits an intriguing divergence: emerging tech companies like Aeva and SiLC are unwaveringly advancing the chip-based implementation of 4D coherent detection, while some established players and semiconductor giants adopt a more cautious approach.
In the current mass-produced vehicle market, the vast majority of Level 2+ advanced driver-assistance systems prioritize sensor cost and maturity. Pulsed 905 nm radars, benefiting from mature supply chains and low-cost silicon detectors, continue to dominate.
Mobileye's decision in late 2024 to terminate its internal FMCW LiDAR development program serves as a symbolic event in this industrial debate. As a leader in autonomous driving perception, Mobileye concluded that its computer vision perception capabilities had improved beyond expectations, and when combined with its proprietary imaging radar, sufficient velocity dimension information could already be provided.
From their perspective, the rapid price declines of third-party Time-of-Flight radars have already met the perception needs of the current passenger vehicle market from a commercial standpoint. Continuing to invest substantial resources in developing immature FMCW technology offered limited marginal benefits in the short term. This highlights how technological superiority must ultimately align with cost-benefit curves and product time-to-market considerations in commercial implementation.
Of course, this does not signify the end of the FMCW LiDAR pathway. In sectors such as heavy-duty freight trucks, autonomous shuttles, and higher-level L4 robotaxis, FMCW LiDAR's advantages remain irreplaceable.
Heavy trucks require precise detection distances exceeding 300 meters and extreme sensitivity to velocity changes when traveling on highways—exactly the scenarios where FMCW technology excels. Meanwhile, as silicon photonics integration processes continue to advance, FMCW radar holds promise for achieving dramatic cost reductions through chip-based implementation. Once a single chip can integrate scanning, ranging, and processing functions, its cost structure will undergo a qualitative transformation, potentially disrupting the market for traditional mechanical or semi-solid-state pulsed radars.
Final Thoughts
FMCW LiDAR represents a technology with exceptionally high potential but also formidable implementation challenges. By leveraging the wave-like properties of light, it introduces an unprecedented coherent dimension to perception systems, providing autonomous vehicles with depth perception capabilities akin to the fusion of biological vision and hearing. Although numerous issues currently require resolution, as autonomous driving algorithms increasingly demand highly reliable perception data and photonic integrated circuit manufacturing technologies mature, FMCW LiDAR will ultimately evolve from expensive laboratory solutions into standard equipment for mass-market consumer vehicles, redefining the perceptual boundaries of road safety.
-- END --
-
![]()
Jitian Xingzhou: A Pioneer in Optical Payloads Secures Hundreds of Millions in Series B Funding!
-
![]()
Orders Secured Through to the Second Half of the Year! The Rationale Behind the 'Surge' in Demand for This Company’s Optical-Grade Base Films
-
![]()
Beyond Patents: The Retail Rivalry of Insta360 and DJI Unfolds
-
![]()
180 Billion Market Cap Vanished! How Did Seres Fall So Far?
-
![]()
Blockbuster! Domestic storage takes the global double crown for the first time, from an AI company
-
![]()
China Spearheads Formulation! World's Pioneering Global Technical Regulation for Automated Driving Systems Greenlit and Unveiled
-
![]()
Farewell to Pulsed Support Policies: Three Major Auto Policy Directions from Multiple Departments Take Effect on the Same Day
-
![]()
Embercore AI’s Accelerated Funding: The Robot Industry’s Shift Toward ‘Learning Systems’